Изобретение относится к конструкциям модулей промышленных роботов.
Целью изобретения является повышение точности позиционирования за счет уменьшения изгибающих моментов на выходном звене,
На чертеже схематично изображен модуль промьшшенного робота.
Модуль промышленного робота состоит из силового цилиндра, выполненного двухпоршневым. В корпусе 1 силового цилиндра установлена направляющая 2, исключающая проворот поршней 3 и 4 вокруг оси, с поршнем 4 жестко связан шток 5, Корпус 1 силового цилиндра имеет присоединительный фланец 6 для связи с другими модулями. На направляющей 2 посредством кронштейна закреплены электродвигатели 7 и 8, вйходные валы которых связаны с ходовыми винтами 9 и 10, Последние смонтированы соосно корпусу силового цилиндра и в подшипниковых опорах 11 и 12. Ходовой винт 10 содержит два участка; у первого резьба выполнена с правой нарезкой винтовой линии, а у второго - с левой. В поршнях 3 и 4 выполнены основные гайки 13 и 14 расположенные на ходовых винтах 9 и 10. Шток 5 выполнен полым и в нем телескопически установлен полый стакан 15 с возможностью осевого перемещения вдоль штока 5, Стакан 15 жестко скреплен с дополнительной гайкой 16, зацепленной со второй половиной ходового винта 10. Свободный конец стакана 15 оснащен присоединительным фланцем 17 и является выходным звено модуля. Стакан t5 образует поступательную кинематическую пару со штоко 5 посредством шпонки 18, Ходовой винт 9 выполнен с возможностью осевого перемещения вдоль корпуса 1 силового цилиндра.
Модуль промышленного робота работает следующим образом.
Рабочий цикл состоит из двух фаз настройка размерной информации и силовое перемещение. В процессе настройки модуля на конкретную величину перемещения фланца 17 информация от системы управления (не показана) подается на электродвигатели 7 и 8. Последние вращают связанные с ними ходовые винты 9 и 10, В зависимости от направления вращения двигателей 7 и 8 поршни 3 и 4 перемещаются относительно корпуса 1 в осевом нагюав0
5
0
5
0
лении из-за наличия связи поршней с ходовыми винтами посредством основных гаек 13 и 14, Тем самым удается задать не только произвольную величину рабочего перемещения фланца 17, но и требуемую зону этого перемещения внутри полного диапазона перемещения. Дополнительная гайка 16, зацепленная с ходовым винтом 10 на участке, имеющем противоположное направление винтовой поверхности, также ся по шпонке 18 и внутри штока 5 в осевом относительно корпуса 1 и противоположном относительно движения поршня 4 направлении. Совместно с дополнительной гайкой 16 движется жестко с ней связанньй стакан 15 с фланцем 17, При равном шаге обоих участков ходового винта 10 настроечное перемещение поршня 4 компенсируется противоположным смещением фланца 17, который в конечном итоге не покидает исходной координаты.
Далее от системы управления поступают управляющие сигналы в рабочие полости силового цилиндра. При этом система, состоящая из поршней 3 и 4, совершает возвратно-поступательное перемещение относительно корпуса 1 до упора. Направляющая 2 исключает их проворот вокруг оси.
35
Формула
изобретения
0
5
0
5
Модуль промышленного робота, содержащий силовой цилиндр, выходное звено и задающие упоры, выполненные в виде основных гаек, расположенных на ходовых винтах, кинематически связанных с соответствующими электродвигателями, отличающийся тем, что, с цельнз повьш1ения точности позиционирования, он снабжен стаканом, дополнительной гайкой, направляющей, установленной в корпусе силового цилиндра параллельно его штоку и кронштейнам, установленным на направляющей, и несущей электродвигатели, причем ходовые винты установлены соосно, а силовой цилиндр выполнен двухпоршневым и на его поршнйх закреплены основные гайки, при этом один из поршней жестко связан со штоком, выполненны1 1 полым, в полости которого телескопи ески установлен стакан, жестко связанный .соответственно с выходным звеном и дополни313410164
тельной гайкой, установленной на од- своих концах винтовые нарезки проти- ном из ходовых винтов, имеющем на воположного направления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1978 |
|
SU722757A1 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Подъемник | 1986 |
|
SU1323524A1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
| Привод подъемника для вертикального перемещения тяжеловесных конструкций | 1978 |
|
SU747808A1 |
| Стенд для испытаний передачи "винт-гайка | 1977 |
|
SU765683A1 |
| Планетарная винтовая передача качения | 1990 |
|
SU1772491A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ЛИТЬЕВОЙ ТЕРМОПЛАСТАВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ ПЛАСТМАСС | 1991 |
|
RU2010715C1 |
Изобретение относится к конструкциям модулей про алпленных роботов. Целью изобретения является повьшение точности позиционирования модуля за счет уменьшения динамических нагрузок. Это достигается тем, что силовой цилиндр выполнен двухпоршневым, в каждом поршне 3 и 4 закреплены основные гайки 13 и 14, расположенные соответственно на ходовых винтах 9 и 10, установленных соосно. Выходное звено связано со стаканом .15, телескопически установленным в полом штоке 5 и связанном с дополнительной гайкой 16. Гайка 16 установлена на ходовом винте 10, при этом на последнем выполнены винтовые нарезки противоположного направления. Кроме того, в корпусе 1 силового цилиндра установлена направляющая 2, на которой посредством кронштейна закреплены электродвигатели 7 и 8. Направляющая 2 исключает поворот поршней 3 и 4 вокруг оси. 1 ил. сл 00 Г8 16 К 17 ot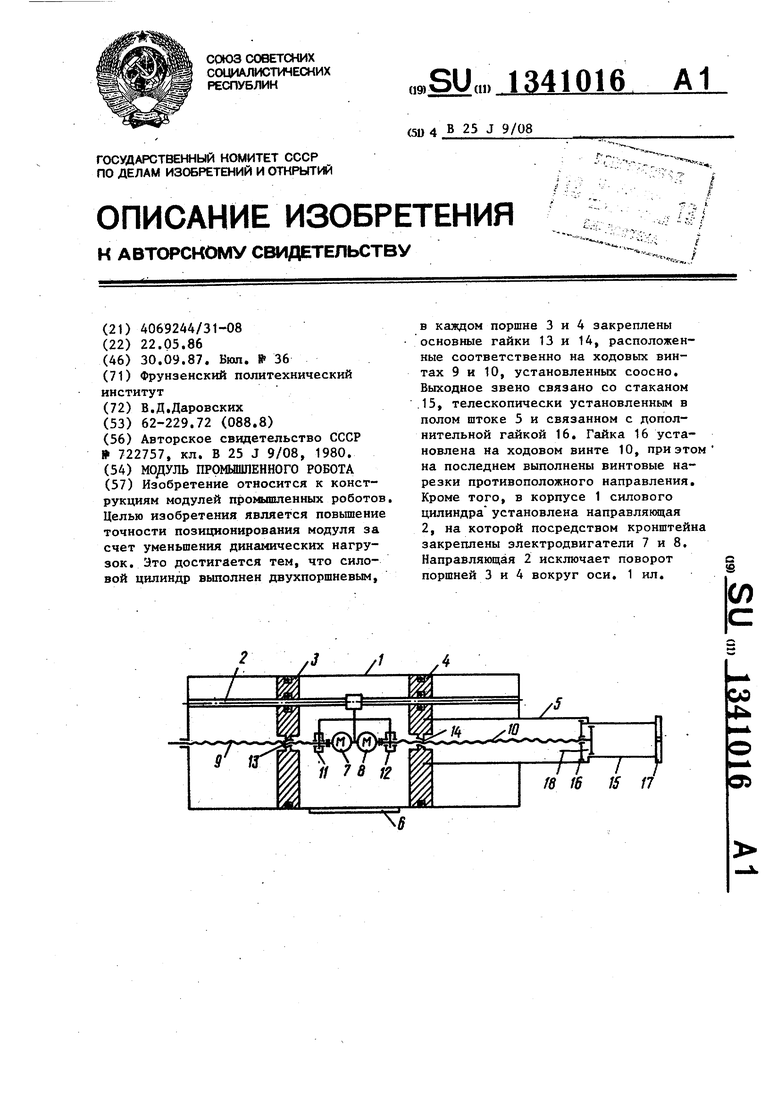
| Модуль промышленного робота | 1978 |
|
SU722757A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
