(54) ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИГШ 
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2521158C1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1602791A1 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 2015 |
|
RU2599855C1 |
| Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач | 2022 |
|
RU2794081C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Электромеханический двухпоточный привод транспортной машины с бортовым способом поворота | 2018 |
|
RU2726881C2 |
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1982 |
|
SU1092369A1 |
| БЕССТУПЕНЧАТЫЙ МЕХАНИЗМ ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2298505C2 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297926C1 |


1
Изобретение относится к транспортному машиностроению, в частности к трансмиссии гусенкчных машин.
Известны трансмиссии гусеничных машин, содержащие две бортовые регулируемые передачи, входной вал каждой ия которых связан с двигателем, а выходной - с первым эвеном бортового трехзвенного дифференциального механизма, второе звено которогосоедйнено с ведущим ко;1есом, а третье - передачей , с аналогичным звеном дифференциального механизма другого борта 1
Такие трансмиссии содержат две регулируемые передачи, два бортовых трехзвенных дифференциальных механизма и передачу, связывающую аналогичные звенья бортовых трехзвенных дифференциальных механизмов.
При повороте машины через регулируемые передачи Лроходит мощность, большая чем при прямолинейном движении, что приводит к перегрузке передач.
Известна также трансмиссия гусеничной машины, в которой, с целью исключения перегрузки бортовых регулируемых передач при повороте маиш ны третье звено каждого бортового трехзвеннего дифференциального механизма связано передачей с выходным валом регулируемой передачи другого борта 2.
Такая трансмиссия содержит две бортовые регулируемые передачи, два бортовых трехзвенных дифференциальных механизма и две передачи, связывающие одно из звеньев каждого бортового трёхзвенного дифференциального механизма v выходным валом регулируемой передачи другого борта.
Однаков такой трансмиссии необходимо обеспечить двумя валами связи звеньев дифференциальных механизм с выходными валами регулируемых передач другого борта, что затрудняет компоновку моторно- рансмиссионного отделения гусеничной машины.
Цель изобретения - упрощение конструкции .
Цель достигается тем, что дифференциальный механизм в предлагаемой трансмиссии выполнен четырехзвенным; при этом четвертое звено его связано с вед5щим колесом другого борта гусеничной машины.
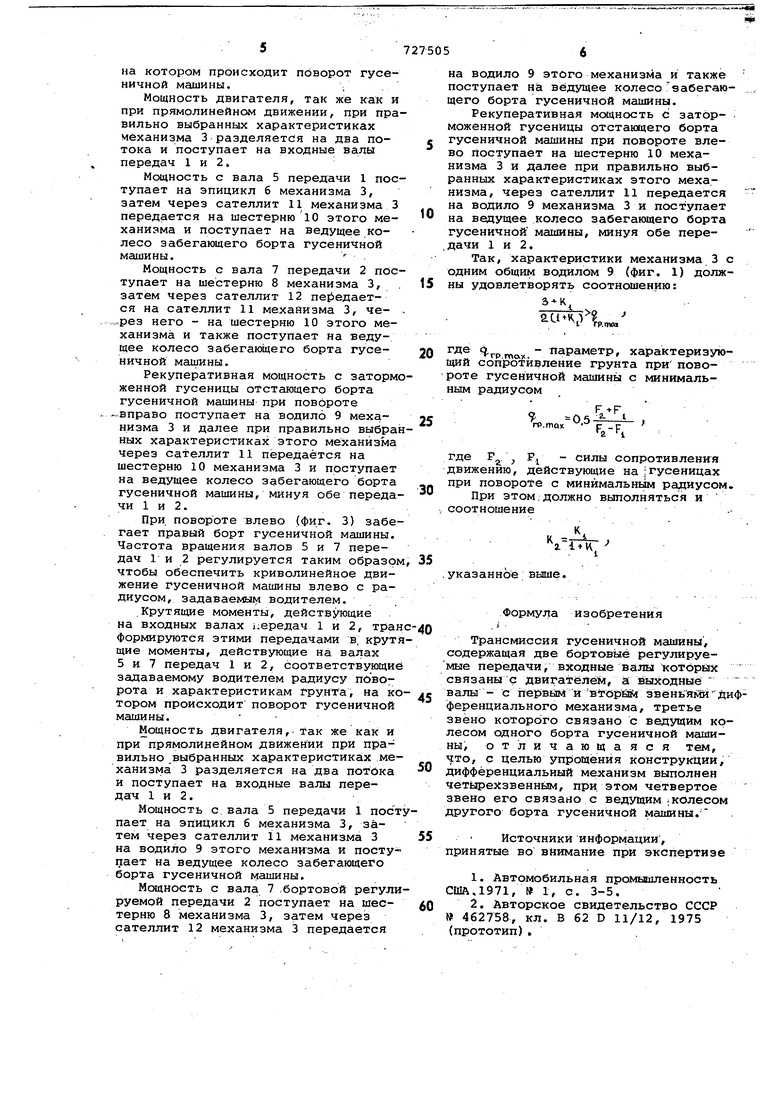
На фиг. 1 изображена схема трансмиссии -при прямолинейном движении; на фиг. 2 - то же,при повороте впра во; на фиг. 3 - то повороте влево.
Трансмиссия содержит бортовые регулируемые передачи 1 и 2 и четырехзвенный дифференциальный механизм 3. Бортовые регулируемые передачи 1 и 2 связаны входными валами с валом 4 двигателя. Выходной вал 5 бортовой передачи 1 связан с одним звеном (эпициклом) б механизма 3, выход- ной вал 7 передачи 2 связан со вторым звеном (солнечной шестерней) 8 четырехзвеннего механизма 3. Третье звено (водило) 9 механизма 3 связано с ведущим колесом одного борта, а четвертое звено (солнечная шестерня) 10 механизма 3 связано с ведущим колесом другого борта гусеничной машины. Ведущие колеса машины на фигурах не показаны.
В качестве бортовых регулируемых передач.могут быть бортовые ступенчатыё коробки передач, гидрробъем- ные передачи, злектромоторы, .бесступенчатые передачи, и т. п
Работает трансмиссия следующим
дбразбм.
При прямолинейном движении гусеничной машины мощность двигателя Е аэделяется на два потока (фиг, 1) и поступает на входные валы бортовых регулируемых передач 1 и 2. Крутящие моменты, действующие на входных валах передач 1 и 2, трансформируются этими передачами в соответствующие -крутящие моменты, действующие на выходных валах 5 и 7 передач 1 и
машины. Мощность с вала 7 передачи
2поступает на звено 8 механизма 3, затем через сателлит 12 механизма
3передается на звено 9 этого меха-низма и поступает на ведущее колесо другого борта гусеничной машины.
Вращение вала 5 передачи 1 передается на эпицикл б механизма 3,вращение вала 7 передачи 2 передается на звено 8 механизма 3, Звено б находится в зацеплении с. сателлитом 11, а звено 8. - ссателлитом 12. ателлиты 11 и 12 сидят на одном алу и вращаются о одинаковой угЛовой скоростью, приводя во вращение одило 9 и шестерню 10 механизма 3, вязанные, с ведущими колесами гусенйчной машины . При правильно выбраных кйнематичес.ких характеристиках меанизма 3 при синхронном и одинаковом элюнении частоты вращениявыходных алов переда 1 и 2 синхронно и одинаково изменяются частоты вращения водила 9 и шестерни 10 механизма 3, а следовательно, синхронно и одинаково изменяются частоты вращения ведущих колес гусеничной машины, связанных с шестерней 10 и водилом 9 механизма 3..
В соответствии с синхронным и одинаковым изменением частоты вращения валов 5 и 7 передач 1 и 2 и синронным и одинаковым изменением частоты вращения ведущих колес гусеничной машины, связанных с соответствующими звеньями 9 и 10 четырехзвенного дифференциального механизма 3, синхронно и одинаково изменяются и крутящие моменты, действующие как на валах 5 и 7 передач 1 и 2, так и на валах ведущих колес машины. Трансформация крУ тящих моментов, действующих на ведущих колесах, по отношению к крутящим моментам, действующим на валах 5 и 7 передач 1 и 2, определяется характеристиками механизма 3 и связей его звеньев с. валами 5 и 7 Передач 1 и 2 и с ведущими колесами гусеничной машины. При правильно выбранных характеристиках механизма связи его звеньев-эпи1дикла б с валом 5 передачи 1 и шестерни 8с валом 7 передачи 2 могут быть симметричными (одинаковыми), так же как и связи его звеньев шестерни 10 с ведущим колесом одного борта и водила 9 - с ведущим колесом другог борта гусеничной машины.
Так, характеристики механизма 3 с одним общим водилом9, показанног на фиг. 1,должны удовлетворять от.ношению:
К,
где
а V,, 7,, iv и Х,г - числа зубьев соответственно эпицикла б, шестерни 8, солнечной шестерни 10, сателлита 11 И сателлита 12 четырехзвенного дифференциального механизма 3.
При повороте гусеничной машины трансмиссия работает следующим образом.
При повороте вправо (фиг. 2) забегает левый борт гусеничной машины. Частота вращения валов 5 и 7 передач 1 и 2 регулируется таким образом, чтобы обеспечить криволинейное движение гусеничной Машины вправо с радиусом, задаваемым водителем.
Крутящие моменты, действующие на входных валах передач 1 и 2, транформируются этими передачами в крутяйше моменты, действующие на валах. 5 и 7 передач 1 и 2 и соответствующие задаваемому водителем радиусу поворота и характеристикам грунта, на котором происходит поворот гусеничной машины., . Мощность двигателя, так же как и при прямолинейном движении, при правильно выбранных характеристиках механизма 3 разделяется на два потока и поступает на входные валы передач 1 и 2, Мсяцность с вала 5 передачи 1 поступает на эпицикл 6 механизма 3, затем через сателлит 11 механизма 3 передается на шестерню 10 этого механизма и поступает на ведущее .колесо забегающего борта гусеничной машины. Мощность с вала 7 передачи 2 поступает на шестерню 8 механизма 3, , затем через сателлит 12 пе1Ьедается на сателлит 11 мехайизма 3, че,.рез него - на шестерню 10 этого механизма и также поступает на ведущее колесо забегающего борта гусеничной машины. Рекуперативная мощность с затормо женной гусеницы отстающего борта гусеничной машины при повороте -вправо поступает на водило 9 механизма 3 и далее при правильно выбран ных характеристиках этого механизма через сателлит 11 передаётся на шестерню 10 механизма 3 и поступает на ведущее колесо забегающего борта гусеничной машины, минуя обе передачи 1 и 2. При повороте влево (фиг. 3) забегает правый борт гусеничной машины. Частота вращения валов 5 и 7 передач 1 и 2 регулируется таким образом чтобы обеспечить криволинейное движение гусеничной магаины влево с радиусом, задаваемым водителем. Крутящие моменты, действующие на входных валах передач 1 и 2, тран формируются этими передачами в, крут щие моменты, действующие на валах 5 и 7 передач 1 и 2, соответствующие задаваемому водителем радиусу поворота и характеристикам грунта, на ко тором происходит поворот гусеничной машины. Мощность двигателя,-Так же как и при прямолинейном движении при правильно выбранных характеристиках ме ханизма 3 разделяется на два потока и поступает на входные валы передач 1 и 2. Мощность с вала 5 передачи 1 пост пает на эпицикл 6 механизма 3, затем через сателлит 11 механизма 3 на водило 9 этого механизма и поступает на ведущее колесо забегающего борта гусеничной машины. Мсяцность с вала 7 .бортовой регули руемой передачи 2 поступает на шеетерню 8 механизма 3, затем через сателлит 12 механизма 3 передается на водило 9 этого механизма и также поступает на ведущее колесо забегаюего борта гусеничной машины. Рекуперативная мощность с затор- . моженной гусеницы отстающего борта гусеничной машины при повороте влево поступает на шестерню 10 механизма 3 и далее при правильно выбранных характеристиках этого механизма, через сателлит 11 передается на водило 9 механизма 3 и поступает на ведущее колесо забегающего борта гусеничной машины, минуя обе передачи 1 и 2. Так, характеристики механизма 3 с одним общим водилЬм 9 (фиг. 1) должны удовлетворять соотношению: « J где гр - параметр, характеризующий сопротивление грунта при повороте гусеничной машины с минимальным радиусом 0, где Р , PI - силы сопротивления движению, действующие на ;гусеницах при повороте с минимальным радиусом. При этом,должно выполняться и соотношение указанное выше. Формула изобретения Трансмиссия гусеничной машины, содержащая две бортовые регулируемые передачи, входные валы котсэрых связаны с двигателей, а выходные валы - с перовым ив торы эвёньНмй дифференциального механизма, третье звено которого связано с ведущим колесом одного борта гусеничной меидины, отличающаяся тем, что, с целью упрощения конструкции, дифференциальный механизм выполнен четЬарехзвенным, при этом четвертое звено его связано с ведущим ; колесом другого борта гусеничной машины. Источники информации , принятые во внимание при экспертизе 1.Автомобильная промышленность США.1971, 1, с. 3-5. 2.Авторское свидетельство СССР 462758, кл. В 62 D 11/12, 1975 (прототип),
(Риг.Ъ
