1
Изобретение отн.осится к автоматике и вычислительной технике и может быть использовано при создании системы управления очувствленным промышленным роботом.
Известно устройство для управления адаптивным роботом, содержащее контактные чувствительные элементы, блок управления и вычислительный блок 1.
Однако оно имеет узкую область применения.
Наиболее близким техническим решением к изобретению является устройство, содержащее генераторы, входы которых соединены с выходами соответствующих чувствительных элементов 2.
Недостатками данного устройства являются загрязнение поверхности матрицы, которое ведет к изменению емкости между пластинами и объектом, т.е. снижению точности измерения; необходимость работы на высокой частоте, что приводит к усложнению конструкции электронной части устройства; низкая разрешающая способность .
Цель изобретения г расширение, области применения устройства.
Для этого в устройство введены последовательно соединенные коммутатор, пороговый элемент, блок вычисления координат объекта и по числу чувствительных элементов вы-. прямителя, вход каждого из которых соединен с выходом соответствующего генератора, а выход - с соответствующим первым входом коммутатора,
to другой вход которого подключен к выходу блока вычисления координат объекта.
Кроме того, чувствительные элементы .выполнены в виде индуктивных
5 датчиков,
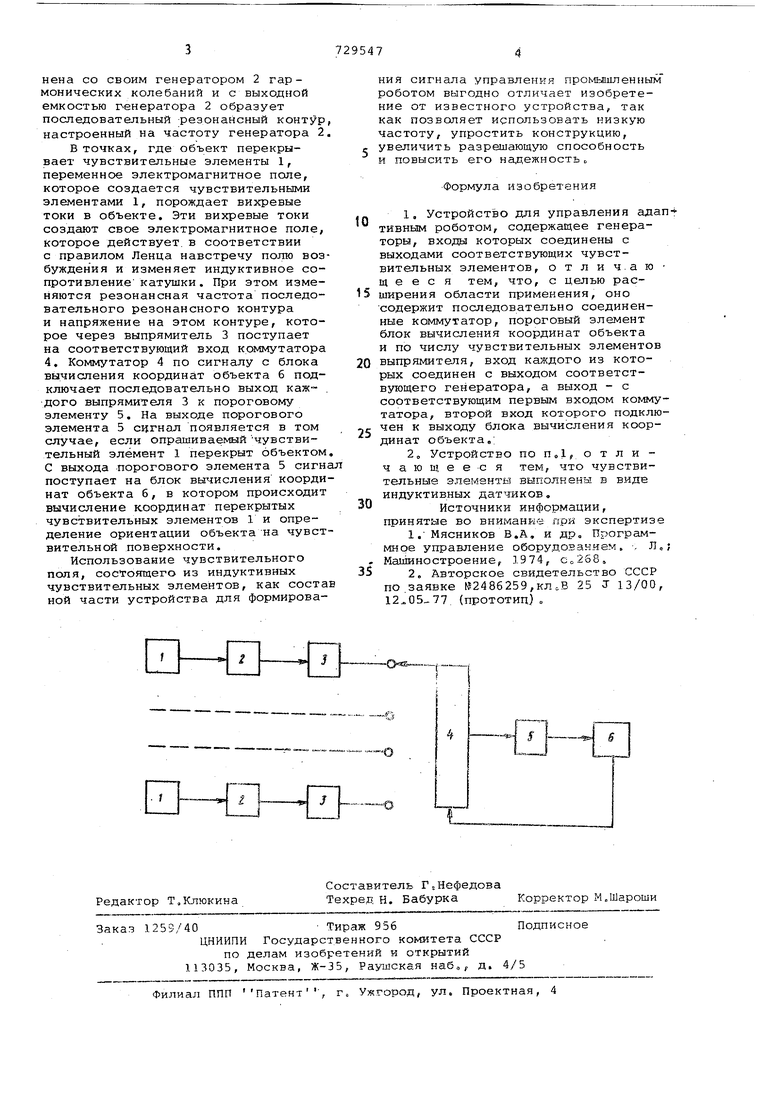
На чертеже представлена функциональная схема устройства.
Оно имеет чувствительные элементы 1, генераторы 2, выпрямители 3,
20 коммутатор 4, пороговый элемент 5, блок вычисления координат объекта 6.
Устройство работает следующим образом.
Металлический объект манипули25рования, установленный на чувствительную поверхность, перекрывает некоторое количество чувствительных элементов 1, Состоящих из катушек, намотанных на ферритовые сердечники. Каждая катушка соеди30
йена со своим генератором 2 гармонических колебаний и с выходной емкостью генератора 2 образует последовательный резонансный контур настроенный на частоту генератора 2
В точках, где объект перекрывает чувствительные элементы 1, переменное электромагнитное поле, которое создается чувствительными элементами 1, порождает вихревые токи в объекте. Эти вихревые токи создают свое электромагнитное поле, которое действует, в соответствии с правилом Ленца навстречу полю возбуждения и изменяет индуктивное сопротивление катушки. При этом изменяются резонансная частота последовательного резонансного контура и напряжение на этом контуре, которое через выпрямитель 3 поступает на соответствующий вход коммутатора 4. Коммутатор 4 по сигналу с блока вычисления координат объекта 6 подключает последовательно выход каж дого выпрямителя 3 к пороговому элементу 5, На выходе порогового элемента 5 сцгнал появляется в том случае, если опрашиваемыйчувствительный элемент 1 перекрыт объектом С выхода порогового элемента 5 сигн поступает на блок вычисления координат объекта б, в котором происходит вычисление координат перекрытых чувствительных элементов 1 и определение ориентации объекта на чувствительной поверхности.
Использование чувствительного поля, состоящего из индуктивных чувствительных элементов, как соста ной части устройства для формироваНИН сигнала управления промышленным роботом выгодно отличает изобретение от известного устройства, так как позволяет использовать низкую частоту, упростить конструкцию, увеличить разрешающую способность и повысить его надежность„
Формула изобретения
1,Устройство для управления адативным роботом, содержащее генераторы, входы которых соединены с выходами соответствующих чувствительных элементов, о т л и ч.а ю щ е е с я тем, что, с целью расширения области применения, оно содержит последовательно соединенные коммутатор, пороговый элемент блок вычисления координат объекта
и по числу чувствительных элементов выпрямителя, вход каждого из которых соединен с выходом соответств тощего генератора, а выход - с соответствующим первым входом коммутатора, второй вход которого подключен к выходу блока вычисления координат объекта,;
2о Устройство по Пв1,о т л и ч а ю щ е е С я тем, что чувствительные элементы выполнены в виде индуктивных датчиков.
Источники информации, принятые во внимание при экспертизе
1. Мясников В.А, и др„ Программное управление оборудованием. , Л„ Машиностроение, 1974, Со2б8,
2.Авторское свидетельство СССР по.заявке №2486259,кл.В 25 J 13/00, 12 05-77 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2000 |
|
RU2201619C2 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ ИЗДЕЛИЯ И ЭЛЕКТРОФИЗИЧЕСКИХ СВОЙСТВ ЕГО МАТЕРИАЛА | 2005 |
|
RU2294535C1 |
| СПОСОБ БЕСКОНТАКТНОГО СЕЛЕКТИВНОГО ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИМПУЛЬСНО-РЕЗОНАНСНО-ВИХРЕТОКОВОГО МЕТОДА (ВАРИАНТЫ) | 2023 |
|
RU2819826C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
| Электромагнитный датчик положения свариваемого стыка | 1987 |
|
SU1488150A1 |
| УСТРОЙСТВО ДВУХПАРАМЕТРОВОГО КОНТРОЛЯ ТОЛЩИНЫ ЭЛЕКТРОПРОВОДНЫХ ПОКРЫТИЙ | 2013 |
|
RU2533756C1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU862115A1 |
| Устройство формирования сигнала управления для промышленного робота | 1977 |
|
SU617256A1 |
