(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки функционального состояния головного мозга | 1989 |
|
SU1814871A1 |
| Устройство формирования сигнала управления для промышленного робота | 1977 |
|
SU617256A1 |
| Устройство для контроля параметров двигателя внутреннего сгорания | 1988 |
|
SU1652858A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СИГНАЛОВ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2278795C2 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Ультразвуковой расходомер В.И.Филатова | 1979 |
|
SU922514A1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для автоматического контроля системы управления тиристорным преобразователем | 1988 |
|
SU1613372A1 |
| Устройство для контроля отклонения геометрических параметров деталей | 1983 |
|
SU1138645A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
Изобретение относится к области робототекники и может быть использовано при создашш систем управления адаптивным промышленным роботом. Известны устройства для управления адаптив ным роботом. Устройство (1, содержащее гене ратор, счетчики, блок управления, регулятор усилеюм, детектор, коммутатор и ультрадауковые датчики, сложно. Наиболее близким техническим решением к изобретет «вляекя ус-сробстко 12), содерж щее блок управлешш роботом, блок эталсжиых сигналов, и коммутатор, первьк вхопл я тико ды котефого соедаиюны сосгветствеюю с выходами и входа га пьезодатчиков, а второй вход с пертым выходом генератора имиульсед. В этом устройстве. сигнал для управления промышленным роботом формируется путем сравнения сдадалов, проя вдоналышх высоте исследуемой детали, установленнад йа контрольном столе, с аналогами сигналов отображения зталонной детали, причем (фавиение происходит позле1уюдаио. Такой метод сравдашш возможен только при условии строгой ориентаадш деталей, находящихся на чувствительном поле контрольного CTOJM. Количество счетчиков и сравнивающих устройств в таком устройстве должно, быть равно количеству чувствительных элементов, перекрытых нсследуем и) деталью на контрольном столе, что вызьтает Нйобходамость включения большого количества счегиков, блоков сравнеЮ1Я, эталонных в приводит к усложнешно устройства. Целью изс гретемия является упроо оше устройства и расширение его функщюналыых возможностей. Сущность изобретения заключается-в тсял, что устройство содержит последовательно соединенные однови атор, селектор и блок выделения шющади детали, а также носледова- . тельно соединенные преобразотатель интервал - дпитвльнос1Ъ импульса, блок вычисления объема детали и жкгический блок, выход которого поюслкгаен к входу блока управления роботом, второй вход - к выходу блока эталонных сигналов, третий вход - к выходу блока вычис} еюш шющади, а четвертый вход - к второму выходу коммутатора, соединенного
третьим выходом с входом преобразователя интервал - длительность импульса, второй выход которого подключен к второму входу грм:нного селектора, а второй выход генератора импульсов соединен с входом одновибратора.
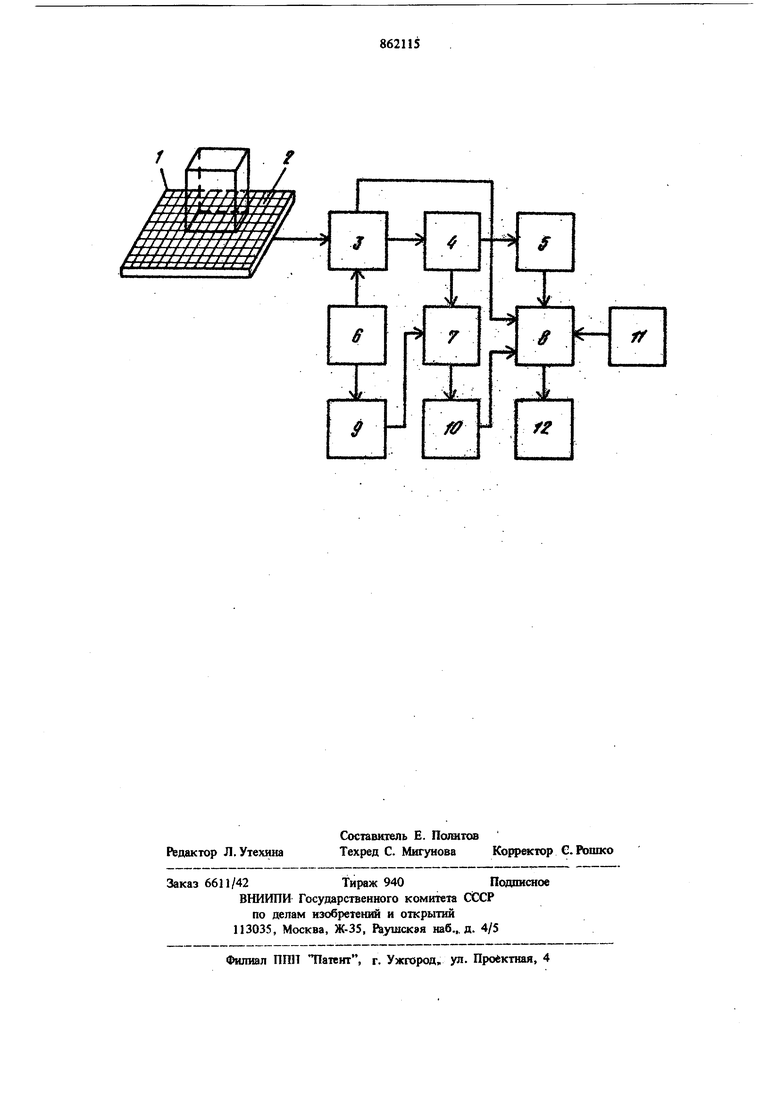
Функциональная схема устройства представлена на чертеже, где обозначены информационная поверхность 1, пьезодатчикн 2, коммутатор 3, преобразователь 4 интервал - длительность импульса, блок 5 вычисления обьема детали, генератор 6 импульсов, временной селектор 7, логический блок 8, одновибратор 9, блок 10 вычисления-площади детали, блок 11 эталонны сигналов и блок 12 управления роботом.
Устройство работает следующим образом.
На пьезодатчики 2, образующие информационную поверхность 1, через коммутатор 3 последовательно поступают зондирующие импульсы от генератора 6 импульсов. Если деталь установленная на информационной поверхности 1, перекрьтает какой-либо из пьезодатчиков 2 то отраженный от верхней поверхности объекта ультразвуковой эхо-импульс возвращается на пьезодатчик 2 и через коммутатор 3 поступает на преобразователь v 4, Временной интервал между зондирующим и ответным эхо-импульсами зависит от высоты исследуемой детали, расположенной над опрашиваемым пьезодатчиком 2. В преобразователе 4 временной интервал, преобразованный в длительность лпупьса поступает на вход временного селектора 7. Этот же временной интервал, преобразованный в унитарный код, поступает на вход блока 5 вычисления объема. При последовательном опросе всех пьезодатчиков 2 блок 5 вьршсления объема детали суммирует пост)шающую информацию о высоте детали от каждого пьезодатчика 2, перекрытого исследуемой деталью и полученную сумму, эквивалентную объему детали, записывает в логический блок 8. Синхронизирующий импульс с генератора 6 импульсов поступает на вход перестраиваемого одновибратора 9. Длительность импульса на выходе одновибратора 9 настраивается на временной интервал между зондирующим и эхо-импульсами, соответствующий максимальной высоте исследуемой детали. Импульс о выхода одновибратора 9 поступает на вход временного селектора 7, где происходит сравнение этого импульса по длительности с импульсами, поступающими от преобразователя 4. Если исследуемая деталь перекрывает пьезодатчик 2, то длительность импульса с выхода преобразователя 4 будет меньше длительности импульса с выхода одновибратора 9, и на выходе селектора 7 сформируется импульс, поступающий
1ш блок 10 вьпшслеиия площади детали. Блок
10вычисления площади суммирует поступающие импульсы. При последовательном опросе всех пьезодатчиков 2 в блоке 10 вычисления площади детали зафиксируется число, соответствующее количеству пьезодатчиков 2, перекрытых деталью. Полученное число, эквивалентное площади исследуемой детали, записывается в логический блок 8. В логическом блоке 8 после опроса всех пьезодатчиков 2 по сигналу, поступающему с одного из выходов коммутатора 3, происходит распознавашю нужной детали по двум информативньм признакам - объему
и площади путем сравнения аналогичных признаков эталонной детали, поступающих из блока
11эталонных сигналов. После распознавания в логическом блоке 8 фо{йлируется сигнал на управления адаптивным промышленным роботом
Изобретение позволит значительно упростить устройство для управления адаптивным роботом и расширить его функциональные возможности за счет исключения необходимости строгой ориентации детали.
Формула изобретения
Устройство для управления адаптивным роботом, содержащее блок управления роботом, блок эталонных сигналов и коммутатор, первые входы и выходы которого соешшенм соответственно с выходами и входами яьезодатчиков, а второй вход - с первым выходом генератора импульсов, отличающееся тем, что, с целью упрощения устройства и расширения его функциональных возможностей оно содержит последовательно соединенные одиовибратор, временной селектор и блок вычисления плошади детали, а также последовательно соединенные преобразователь интервалдлительность импульса, блок вычисления объема детали и логический блок, выход которого подключен ко входу блока управления роботом второй вход - к выходу блока эталонных сигналов, третий вход - к выходу блока вычисления площади детали, а четвертый вход к второму выходу коммутатора, соединенного третьим вьиодом с входом преобразователя интервал-длительность импульса, второй выход которого подключен к второму входу временного селектора, а второй выход генератора импульсов соединен с входом одновибратора. Источники информации,
принятые во внимание при экспертизе
