Изобретение относится к машиностроению и может быть использовано в подъемно-транспортных механизмах для вывешивания и горизонтирования грузовой платформы (грузоподъемной машины), расположенной на неподготовленной площадке.
Известен гидравлический привод вывешивания и горизонтирования грузовой платформы, содержащий гидровинтовые опоры, установленные на платформе, гидронасос, связанный гидролиничми с дозатором возвратнопоступательного движения через реверсивный золотник, соединенный гидролинией с што.ковой полостью опорьа управляемые обратные клапаны,штокбвые полости которых соединены с опорами, дополнительный распределитель связанный с гидронасосом и с поршневыми и штоковыми полостями управляемых обратных клапанов, гидробак дополнительный привод вращения винтов опор
1.
Однако при использовании в приводе гидровинтовых опор, имеющих две кинематических ветви - основную ветвь, предназначенную для перемещения цилиндров и штоков гидровинтовых опор,
и вспомогательную (несиловую) ветвь, предназначенну1С) для вращения винтов указанных опор, для исключения заклинивания винтов производительность насоса несиловой ветви необходимо назначать в соответствии со скоростью холостого втягивания штоков опор, которая определяется производительностью основного насоса и площадью
10 штоковых полостей опор.
Целью изобретения является повышение КПД гидропривода путем уменьшения скорЬсти холостого втягивания штоков опор.
15
Указанная цель достигается тем, что гидросистема дополнительно снабжена регу.лятором расхода, обратным и напорным клапанами, причем регулятор расхода расположен на гидро20линии, соединяющей штоковые полости опор и реверсивный золотник, а обратный клапан соединен последовательно с напорным клапаном и параллельно - с регулятором расхода.
25
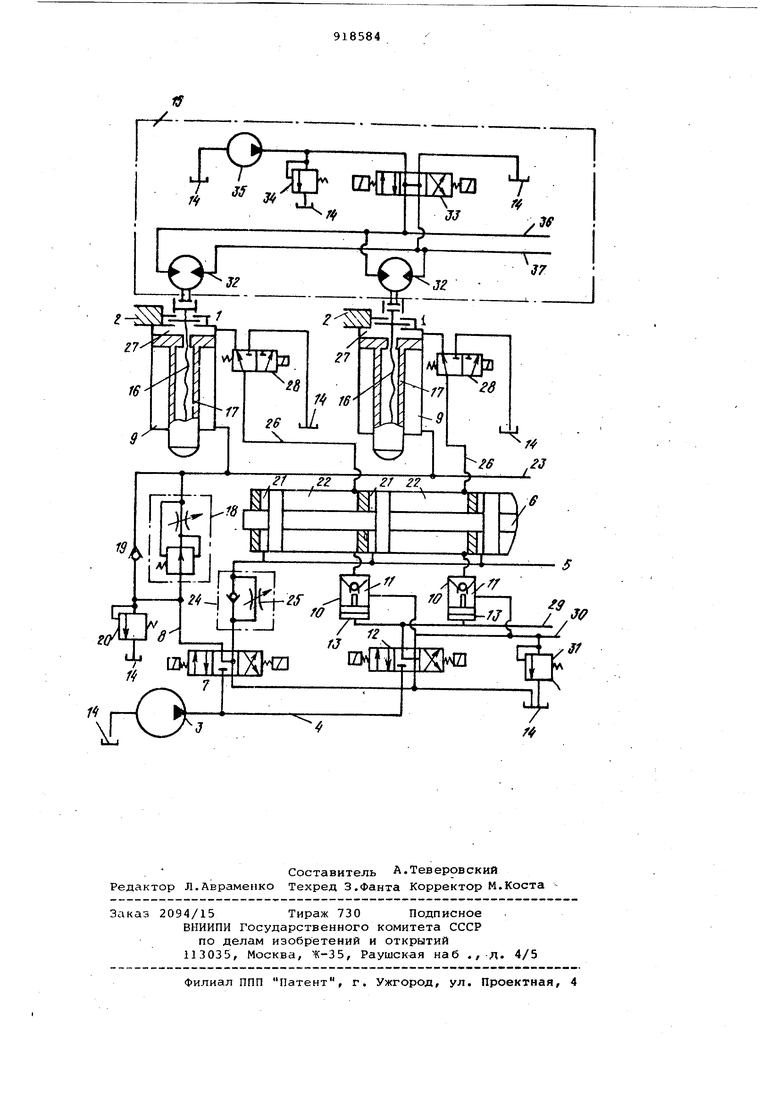
На чертеже представлена схема гидравлического привода вывешивания и горизонтирования грузовой платформы.
Гидравлический привод вывешивания
30 и горизонтирования грузовой платформы содержит гидровинтовые опоры 1, установленные на платформе 2, гидронасо.с 3 ,связанный, гидролиниями 4 и 5 с дозатором 6 ;возвратно-поступатель ного движения через реверсивный золотник 7, соединенный гидролинией 8 с штоковой полостью 9 опоры 1, управляемые обратные клапаны 10, штоковые полости 11 которых соединены с опорами -1, дополнительный распределитель 1.2, связанный с гидронасосом 3 и с поршневыми 13 и штоковыми 11 полостями управляемых обратных клапанов 10, гидробак 14 и дополнительный привод 15 вращения винтов 16 опор 1. Гидросистема для уменьшения скорости холостого втягивания штоков 17 опор 1 снабжена регулятором расхода 18, обратным 19 и напорным 20 клапанами, причем регулятор расхода 18 расположен на гидролинии 8, соединяющей штоковые полости 9 гидровинтовых опор 1 и реверсивный золо тник 7, а обратный клапан 19 соединен последовательно с напорным клапаном 20 и параллельно - с регулятором расхода 18. Число полостей 21 и 22 дозатора 6 возвратно-поступательн го движения равно количеству опор 1, штоковые полости 9 которых соединены с гидробаком 14 гидролинией 23.Гидро линия 5 соединяет полости 21 дозатора 6 возвратно-поступательного движения через обратный клапан 24 и регулируемый дроссель 25с реверсивным золотником 7. На каждой гидролинии 26, связывающей полости 22 дозатора 6 возвратно-поступательного движения с поршневой полостью 27 опоры 1, установлен золотник горизонтирования 28. Гидролинии 29 и 30 соединяют поршневые 13 и штоковые 11 полости управляемых клапанов 10 с соответствующими 1ГОЛОСТЯМИ обратных клапанов (не показаны). К гидролинии 30,соединяющей штоковые полости 11 управляемых обратных клапанов 10 с дополнительным распределителем 12,подсоединен перепускной клапан 31. Клапан 31 настроен на давление, несколько превыишющее давление,необходимое для выполнения операции холостого выпуск штоков опор до контакта с грунтом. Дополнительный привод 15 вращения винтов 16 гидровинтовых опор 1 состо ит из гидромоторов 32, валы которых соединены с винтами опор, реверсивного золотника 33, переливного клапа на 34 и насоса 35. Число гидромоторов 32 равно количеству гидровинтовых опор 1. Переливной клапан 34 настраивается на давление, несколько превышающее величину давления, необходимую для вращения винтов опор 1 без нагрузки. Производительность насоса 35 выбирается в соответствии с максимальной скоростью движения опор 1 при подъеме или опускании 2. Гидролинии 36 и 37 соединяют золотник 33 с гидромоторами 32 не показанных на чертеже гидровинтовых опор 1, Гидросистема содержит фильтры, предохранительные клапаны и устройство для разгрузки основного насоса, не представленные на чертеже. Гидравлический привод вывещивания и горизонтирования грузовой платформы работает следующим образом. В исходном состоянии все золотники занимают положение, изображенное на чертеже. После включения насосов 3 и 35 золотник 33 переключается в правую позицию и масло от насоса 3 через золотник 33 поступает к рабочим камерам гидромоторов 32. Гидромоторы 32 из-за малой величины крутящего момента не вращаются . При переключении распределителя 12 в правую позицию масло от насоса 3 через открытый золотник 7, управляемые обратные клапаны 10, Полости 22 дозатора б и золотники 28 поступают в поршневые полости 27 опор 1. По достижении в них давления, достаточного для преодоления сил сопротивления холостого хода, штоки 17 гйдроопоры перемещаются вниз. Винты 16 начинают вращаться. Из штоковых полостей 9 опор масло через обратный клапан 19 и золотник 7 сливается в гидробак 14. После того как штоки 17 всех опор коснутся грунта, давление в основной ветви повышается до величины, на которую настроен клапан 31. Клапан 31 сраба- тывает, перепуская масло от насоса 3 в гидробак 14 и подает электрический сигнал на приведение распределителя 12 в среднее положение. Управляемые обратные клапаны 10 закрываются. Для осуществления вывешивания и подъема платформы 2 золотник 7 переключается в правую позицию и масло от насоса 3 через открытый золртник 7 и обратный клапан- 24 поступает в полости 21 дозатора 6, осуществляя движение его поршней вправо . Вытесняемое из полостей 22 дозатора 6 масло поступает через золотник 28 в поршневые полости 27 опор Происходит синхронное движение опор. Из штоковых полостей 9 опор масло через обратный клапан 19 и золотник 7 сливается в гидробак 14. Горизонтирование платформы 2 осуществяяется с помощью золотников 28. При переключении золотников 28, связанных с опережающими опорами 1, в правую позицию масло из соответствующих полостей 22 дозатора 6 поступает в гидробак 14. Отстающие опоры 1 продолжают движение вверх. По достижении заданной точности горизонтирования золотники 28 переключаются в левую позицию. После подъема платформы 2
на заданную величину рабочего хода золотник 7 и золотник 33 переводятся в среднее положение и насосы 3 и 35 включаются . Нагрузка от веса платформы 2 воспринимается винтами 1 б гидровинтовых опор 1. .
.Перед опусканием платформы 2 и холостым втягиванием штоков 17 опор в исходное положение золотник 33 после пуска насосов 3 и 35 переключается в левую позицию. Масло от насоса 35 поступает к гидромоторам 32, --стремясь вращать-их в направлении, противоположном тому, какое было при подъеме. Гидромоторы 32 не вращаются, поскольку на. винты 16 опор 1 в этом случае действует полная величина внешней нагрузки от веса платформы 2. Для разгрузки винтов 16 опор золотник 7 на Некоторое время переключается в правую позицию.
При этом ма.сло от основнслго насоса 3 поступает в полости 2 дозатора 6 и перемещает его- поршни вправо. Масло в поршневых полостях 27 опор сжимается,.воспринимая вес платформы 2, винты 16 Гидровинтовых опор 1 разгружаются и поворачиваются в пределах зазора в винтовой паре, стремясь переместить опору вниз. Затем при переключении золотника 7 в левую позицию масло от насоса 3 через открытый золотник 7 и регулятор расхода поступает в штоковые полости-9 гидровинтовых опор 1. Давление, развиваемое насосом 3 на данной операции, ограничивается настройкой переливного клапана 20. Платформа 2 под действием собственного веса и давления масла в штоковых полостях 9 опор начинает опускаться, а винты 16 - вращаться. При этом масло, вытесняемое из поршневых полостей 27 опор, поступает в полости 22 дозатора 6, осуществляя перемещение его поршней влево. Из полостей 2 дозатора 6 масло через -дроссель 25 и золотник 7 поступает в гидробак 14. Скорость опускания платформы 2 определяется настройкой дросселя 25. После того,как какой-либо край платформы 2 закончит движение, платформа начинает поворачиваться относительно этого края, стремясь занять положение; исходное перед подъемом , при этом масло из поршневых полостей 27 опор 1 поступает в полости 22 дозатора 6 как вследствие поворота платформы 2, так и вседствие начала убирания щтоков 17 опор, находящихся у края платформы 2, закончившего движение.
По достижении поршнями дозатора 6 крайнего левого положения золотник 12 переключается Р левую позицию и производится операция холостого втягивания штоков 17 опор в исходное положение.При этом масло от насоса 3 через открытый золотник 12 поступает в поршневые полости 13 управляемых обратных клапанов 10. Последние открываются, соединяя с гидробаком ,14 полости 22 дозатора б и поршневые полости 27 гидровинтовых опор 1. Под действием давления масла в штоковых полостях 9 опор их штоки 17 перемешаются вверх. Скорость втягивания штоков 17 ограничена и определяется настройкой регулятора расхода 18, вследствие чего исключается необходимость увеличения частоты вращения гидромото0ров 32 и производительности насоса 35. При перемещении штоков 17 одор вверх масло из поршневых полостей 27 опор 1 через золотник 8, полости 22 дозатора 6, открытые управляемые кла5паны 10 и золотник 12 сливается в гидробак 14. После полного убирания штоков 17 всех опор 1 золотники 7 и 33 и распределитель 12 переключаются в среднее положение, управляемые об0ратные клананы 10 закрываются, а насосы 3 и 35 выключаются.
Использование в гидравлической схеме регулятора расхода 18 с переливным клапаном 20 позволяет уменьшить габариты и вес насоса 35 несило5вой кинематической ветви, стоимость привода, а также снизить затраты мощности при вьпюлнении рабочих операций.
30
Формула изобретения
Гидравлический привод вывешивания и горизонтирования грузойой платфор5мы, содержащий гидровинтовые опоры, установленные на платформе, гидронасос, связанный гидролиниями с дозатором возвратно-поступательного движения через реверсивный золотник,
0 соединенный гидролинией с штоковой полостью опоры, управляемые обратные клапаны, штоковые полости которых соединены с опорами, дополнительный распределитель, связанный с гидронасосом и поршневыми и штоковыми полос5тями управляемых обратных клапанов, гидробак и дополнительный привод вращения, винтов опор, отличающийся тем, что, с целью повышения КПД гидропривода путем умень0шения скорости холостого втягивания штоков опор, гидросистема дополнительно снабжена регулятором расхода, „обратным и напорным клапанами , гричем регулятор расхода расположен
5 на гидролинии, соединяющей штоковые полости опор и реверсивный золотник, а обратный клапан соединен последовательно с напорным клапаном и параллельно - с регулятором расхо0да. .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 657184, кл. F 15 В 11/22, 1979.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1976 |
|
SU657184A1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1986 |
|
SU1326789A1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU731088A2 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU769120A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2004 |
|
RU2258160C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464453C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2003 |
|
RU2240448C1 |