Изобретение относится к подъемно-транспортному машиностроению.
Известен захват для бочек, содержащий неподвижную и подвижную траверсы с шарнирно закрепленными на последней зажимными рычагами, распорное приспособление и стопорные пальцы 1.
Цель изобретения - повышение надежности транспортировки бочек.
Для этого 1федпагаемый захват снабжен поперечной осью и упорной планкой, на конце которой смонтировано распорное приспособление, содержащее трубчатый корпус,пружину и толкатели с шариками, при этом толкатели с шариками установлены с возможностью перемещения под действием пружины в разные стороны, а неподвижная траверса снабжена верхними и нижними секторами, охватывающими снаружи зажилгаые рычаги.
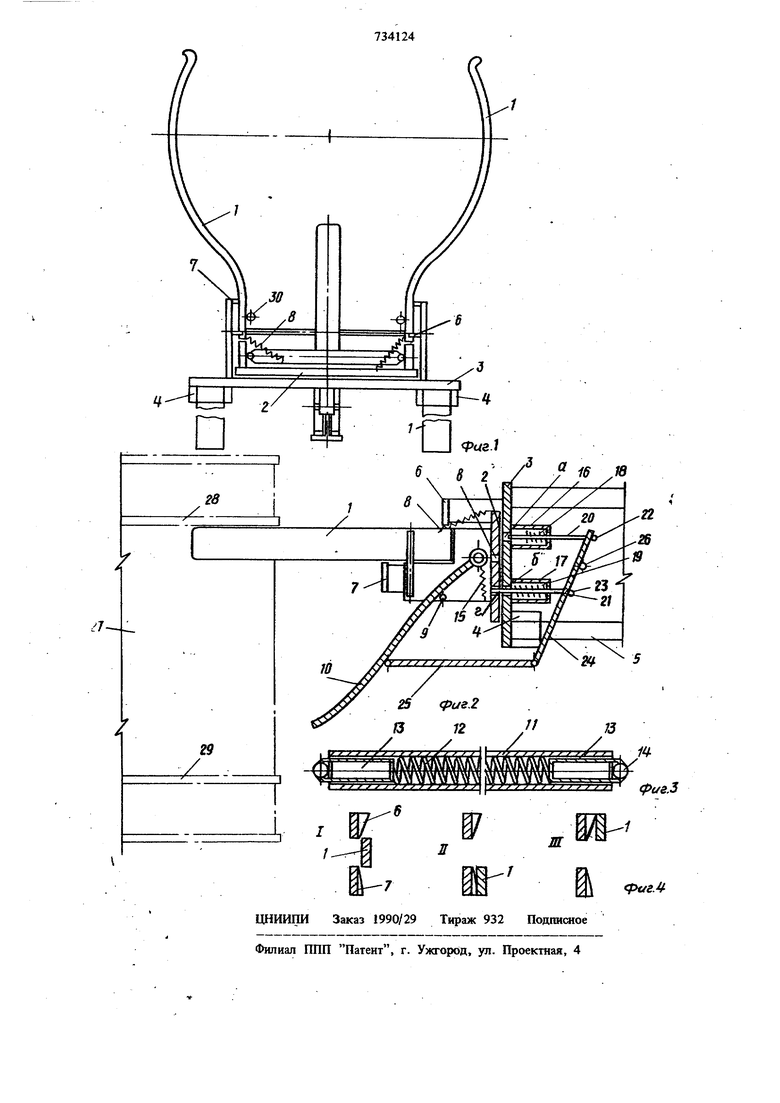
На фиг. 1 схематично изображев описьшае--мый захват, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - распорная пружина; иа фиг. 4 - зажимные рычаги в сечении.
Захват содержит зажимные рьтчаги 1диарннр но-закрепленные на подвижной траверсе 2, навешенной на неподвижной траверсе 3. На траверсе 3 установлены опоры 4 для вил 5 автопогрузчика (на, фигурах не показан).
На траверсе 3 установлены верхние 6 и нижние 7 секторы, взаимодействующие с рычагами 1.
Концы рычагов 1 гфужинами 8 связаны с траверсой 2. К траверсе 2 на поперечной оси 9 прикреплена упорная планка 10, связанная с распорным приспособлением, содержащим трубчатый корпус 11, внутри которого расположена распорная пружина 12 и толкатели 13 с шариками 14, при этом корпус 11 посредством пружины 15 связан с траверсой 2.
На траверсе 3 установлены верхний 16 и нижний 17 цилиндры с подпружиненными пружинами 18 и .19 стопорными пальцами 20 и 21, при этом пальцы выполнены с ушками 22 и 23, через которые проходит рычаг 24, связанный с тягой 25.
Рычаг 24 взаимодействует с осью 26, закрепленной на траверсе 3.
Траверса 3 выполнена с верхним а н нижним б отверстиями, а траверса 2 - с отверстиямя в |Гг. Транспортируемая бочка 27 выполнена с верхним 28 и нижним 29 1фофилированными выстутамн. Рычаги 1 закреплены на вертикалышх осях 30.
Захват работает следующим образом.
Посредс1вом опор 4 захват закреплен на вилах S автопогрузчика. Траверса 2 находатся в исходном положении н зафиксирована стопорным пальцем 21. Рычаги разведены 1фужиHiMf 8.
Захват подводится сбоку под профшшрсжан иый выступ 28 бочки 27 и надвигается на нее до упора. Планка 10 1фи этом псторачивает ся до вергакапьного положения, переводя корпус 11 распорного 1фиспособления на хвостовки рычагов 1.
Толкатели 13 под действием пружины 12 расходятся и нажимают на хвостовики рычагов 1, которые, поворачиваясь на осях 30, сжимают 27.
Одновремешю с этим тягой 25 поворачивается рычаг 24 вокруг оси 26, освобождая стопорный палец 20 н палец 21, при этом траверса 2 освобождается.
При вертикальном положении планки 10 ее конец должен находиться над выступом 29 бочкп 27.
После выпоян шя указанных оюраций вилы 5 погрузчика приподнимают, в результате траверса 2 занимает крайнее ннжте положение, 1ФИ этом секторы 7 совмещаются ш с зажимнымн рычацаМн 1, фиксируя их ;В зажатом положении (см. фиг. 4, положение И Бочка готова к транспорпфованию.
После перемещения и устшовки бочки на место погрузчика несколько опускают, за счет того что конец приводной планки 10 упирается в профилированный выступ 29, препятствуя перемещению траверсы 2, оря этом перемещается траверса 3 до тех пор, noka траверса 2 по отношению к ней не займет крайнее рерхнее положение, которое зафиксируется пальцем 20, входящим в отверстие г. При этом клиновидные секторы 7 совмещаются по высоте с зажимными рычагами 1, воздействуя на нх хвостовики, сжимают пружину 12 распорного приспособления, при этом зажимнь1ё рычаги 1 расходятся. Захват отводится от бочки. Приводная планка 10 под действием тфужины 15 приводится в исходное положенне, при этом pacnqjHoe щ)испособление переводится с хвостсюиков зажимных рычагов 1 на траверсу 3. Тягой 25 рычаг 24 поворачивается, освобождает палец 20 и отжимает палец 21. Траверса 2 больше не фиксируется н под собствен1юй тяжестью опускается вниз из крайнего верхнего положения до совмещения отверстия 2 с пальцем 21, который фиксирует ее в исходном положении. Захват готов для дальнейшей работы.
Формула изобретения
Захват для бочек, содержащий неподвижную и подвиж1огю траверсы с шаршфно-закрепленными на последней зажимными рычагами, распор1юе 1фиспособле}ше и стопорные пальцы, отличающийся тем, что, с целью повьшения надежности транспортнровки бочек, он снабжен поперечной осью н упорной планкой, на конце которой смонгнрстано рлспарнж приспособление, содержащее трубчашй корпус, пружину н толкатели с шгфиками, при этом толкатели с шариками установлены с возможнос1ъю перемешення под действием пружины в разные стороны, а неподвижная траверса снабжена верхними н нижними секторами, охватывающими снаружи зажимные рычаги.
Источники информации, финятые во внимание при экспертизе
1. Авторское свидетельство СССР N« 507510, кл. В 66 С 1/30, 10.08.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для сборки остовов бочек | 1989 |
|
SU1703458A1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Устройство для вскрытия, опорожнения и промывки тары, например бочек, с ядовитыми веществами | 1960 |
|
SU137020A1 |
| Установка для перемешивания краски в бочке | 1990 |
|
SU1808364A1 |
| Захват для бочек к погрузчику | 1983 |
|
SU1105456A1 |
| УСТРОЙСТВО КАРУСЕЛЬНОГО ТИПА ДЛЯ МЕХАНИЧЕСКОЙ СБОРКИ БОЧЕК ИЗ КЛЕПОК | 1935 |
|
SU46033A1 |
| Бочка | 1988 |
|
SU1634598A1 |
| Устройство для вскрытия и опорожнения бочек с токсичными взрывоопасными веществами | 1981 |
|
SU1054222A1 |
| Автомат для завертки конфет"вперекрутку | 1974 |
|
SU516580A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |