Изобретение относится к механизмам управления средств механизации погрузо- разгрузочных работ.
Цель изобретения - улучшение эксплуатационных характеристик путем обеспечения передачи управляюпдего сигнала от двух рядов правильно сориентированных изде- л и и.
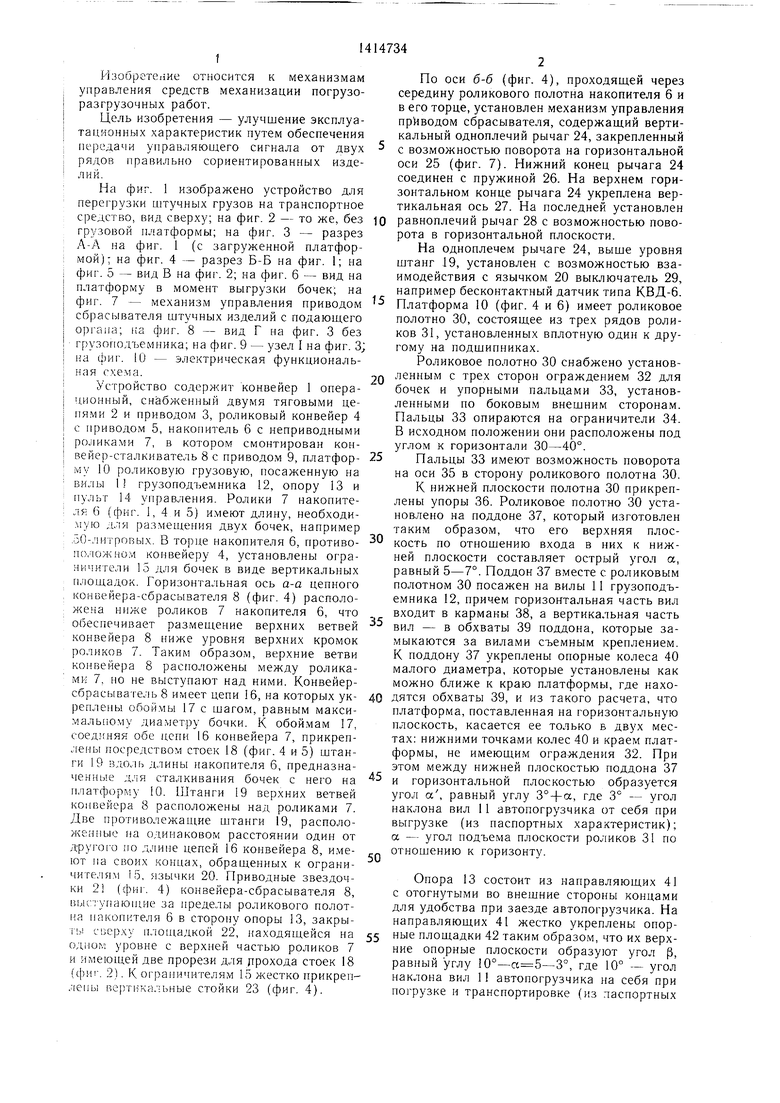
На фиг. 1 изображено устройство для перегрузки штучных грузов на транспортное средстЕЮ, Ешд сверху; на фиг. 2 - то же, без грузовой п. штформы; на фиг. 3 - разрез А-А на фиг. 1 (с загруженной платформой); на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - вид Б на фи1 2; на фиг. 6 - вид на платформу в момент выгрузки бочек; на фиг. 7 - механизм управления приводом сбрасывателя штучных изделий с подающего opi aiia; на фиг. 8 - вид Г на фиг. 3 без грузоподъемника; на фиг. 9 - узел I на фиг. 3; lia фиг. 10 - электрическая функциональная схема.
Устройство содержит конвейер 1 операционный, снабженный двумя тяговыми цепями 2 и приводом 3, роликовый конвейер 4 с приводом 5, накопитель 6 с неприводными роликами 7, в котором смонтирован кон- вейер-сталкиватель 8 с приводом 9, платфор- му 10 роликовую грузовую, посаженную на вилы 11 грузоподъемника 12, опору 13 и пульт 14 управления. Ролики 7 накопителя 6 (фиг. 1, 4 и 5) и.меют длину, необходимую для размепгения двух бочек, например .50-литровых. В торце накопителя 6, противо- положком конвейеру 4, установлены ограничители 15 для бочек в виде вертикальных площадок. Горизонтальная ось а-а цепного конвейера-сбрасывателя 8 (фиг. 4) расположена ниже роликов 7 накопителя 6, что обеспечивает размещение верхних ветвей конвейера 8 ниже уровня верхних кромок роликов 7. Таким образом, верхние ветви конвейера 8 расположены между роликами 7, но не выступают над ними. Конвейер- сбрасыватель 8 имеет цепи 16, на которых ук- реплены обоймы 17 с шагом, равным максимальному диаметру бочки. К обой.мам 17, соединяя обе цепи 16 конвейера 7, прикреп- .лепы посредством стоек 18 (фиг. 4 и 5) штанги 19 вдоль длины накопителя 6, предназначенные для сталкивания бочек с него на платформу 10. Штанги 19 верхних ветвей конвейера 8 расположены над роликами 7. Две противолежащие штанги 19, расположенные на одинаковом расстоянии один от .другого по длине цепей 16 конвейера 8, имеют па своих концах, обращенных к ограничителям iS, язычки 20. Приводные звездочки 21 (фи1. 4) конвейера-сбрасывателя 8, выступ а юнше за пределы роликового полотна накопителя 6 в сторону опоры 13, закрыты свер.ку плоп1адкой 22, находящейся на одном уровне с верхней частью роликов 7 и имеющей две прорези для прохода стоек 18 . 2). К ограничителям 15 жестко прикреп- .-leiibi вертика.чьные стойки 23 (фиг, 4).
По оси б-б (фиг. 4), проходящей через середину роликового полотна накопителя 6 и в его торце, установлен механизм управления приводом сбрасывателя, содержащий вертикальный одноплечий рычаг 24, закрепленный с возможностью поворота на горизонтальной оси 25 (фиг. 7). Нижний конец рычага 24 соединен с пружиной 26. На верхнем горизонтальном конце рычага 24 укреплена вертикальная ось 27. На последней установлен равноплечий рычаг 28 с возможностью поворота в горизонтальной плоскости.
На одноплечем рычаге 24, выше уровня щтанг 19, установлен с возможностью взаимодействия с язычком 20 выключатель 29, например бесконтактный датчик типа КВД-6. Платформа 10 (фиг. 4 и 6) имеет роликовое полотно 30, состоящее из трех рядов роликов 31, установленных вплотную один к другому на подщипниках.
Роликовое полотно 30 снабжено установленным с трех сторон ограждением 32 для бочек и упорными пальцами 33, установленными по боковым внешним сторонам. Пальцы 33 опираются на ограничители 34. В исходном положении они расположены под углом к горизонтали 30-40°.
Пальцы 33 имеют возможность поворота на оси 35 в сторону роликового полотна 30.
К нижней плоскости полотна 30 прикреплены упоры 36. Роликовое полотно 30 установлено на поддоне 37, который изготовлен таким образом, что его верхняя плоскость по отношению входа в них к нижней плоскости составляет острый угол а, равный 5-7°. Поддон 37 вместе с роликовым полотном 30 посажен на вилы 11 грузоподъемника 12, причем горизонтальная часть вил входит в карманы 38, а вертикальная часть вил - в обхваты 39 поддона, которые замыкаются за вилами съемным креплением. К поддону 37 укреплены опорные колеса 40 малого диаметра, которые установлены как можно ближе к краю платформы, где находятся обхваты 39, и из такого расчета, что платформа, поставленная на горизонтальную плоскость, касается ее только в двух местах: нижними точками колес 40 и краем платформы, не имеющим ограждения 32. При этом между нижней плоскостью поддона 37 и горизонтальной плоскостью образуется угол а , равный углу 3°+а, где 3° - угол наклона вил 11 автопогрузчика от себя при выгрузке (из паспортных характеристик); а - угол подъема плоскости роликов 31 по отношению к горизонту.
Опора 13 состоит из направляющих 41 с отогнутыми во внешние стороны концами для удобства при заезде автопогрузчика. На направляющих 41 жестко укреплены опорные площадки 42 таким образом, что их верхние опорные плоскости образуют угол р, равный углу 10°-а 5-3°, где 10° - угол наклона вил 11 автопогрузчика на себя при погрузке и транспортировке (из паспортных
характеристик); а - угол подъема плоскости роликов 31 по отношению к горизонту.
Вершина угла р направлена в сторону заезда, т. е. отогнутых концов направляю- ш,их 41.
Каждая из опорных плош,адок 42 для лучшей фиксации с платформой 10 снабжена упором, одна из сторон которого представляет собой вертикальную подушку 43, установленную с одного торца, а вторая - наклонную площадку 44. Наклонная плошад- ка 44 укреплена под острым углом к горизонту, преимущественно 60-70°. Таким образом, в фиксированном положении палец 33 образует с наклонной стороной 44 упора острый угол Y преимущественно 80-90°, обращенный вершиной вниз. На противоположных торцах опорных площадок 42 установлены два выключателя 45, состоящих из бесконтактного датчика, например КВД-6 с подпружиненным рычагом, аналогичных выключателю 29. Выключатель 29 соединен электрической связью 47 (фиг. 10) на включение и параллельно ей связью 48 на отключение с приводом 5, а также электрической цепью 49 через выключатели 45 с приводом 9. Один из выключателей 45 электрической связью 50 соединен с счетчиком 46 .импульсов, например счетно-импульсным реле (Е-531), настроенным на два включения и установленным в пульте 14 управления. Счетчик 46 импульсов, в свою очередь, подсоединен связью 51 к выключателю 29 и связью 52 с приводом 9.
В пульте 14 управления установлен ключ 53 «Ручное и автоматическое управление., который через электрическую связь 54 соединен с приводом 9 и выключателем 29.
Исходное положение устройства перед работой.
Вертикальная ось 27 с равноплечим рычагом 28 расположена от стоек 23 на некотором расстоянии t . На пульте 14 управления ключ 53 устанавливают в положение «Ручное управление и включением привода 9 конвейера 8 подводят одну из штанг 19 с язычком 20 до оси б-б. При этом язычок 20 воздействует на выключатель 29, который отключает привод 9. После этого на пульте 14 управления ключ 53 переводят в положение «Автоматическое управление. На вилы 11 автопогрузчика грузоподъемностью 3, 2 или 5,0 т устанавливают платформу 10. Для этого горизонтальную часть вил 11 вводят в карманы 38 поддона 37, а с помощью обхва- тов 37 и крепежного приспособления платформу 10 замыкают за вертикальной частью вил. Платформа находится на горизонтальной плоскости и касается ее в двух местах: колесами и краем без ограждения. При этом роликовое полотно 30 платформы 10 наклонено в сторону края, не имеющего ограждения, к плоскости горизонта под углом а 8-10°.
5
0
5
Q
0
5
0
5
Затем грузоподъемник 12 устанав.швамт с наклоном на водителя под углом 10° к вертикали и поднимают вилы. Плоскость роликового полотна оказывается наклоненной к горизонту на угол 10°-а(5-3)° в сторону автопогрузчика.
Устройство работает следующим образом.
На операционном конвейере 1 бочк-;, наполненные соленой рыбой и установленные на приводные тяговые цепи 2, движутся двумя рядами в направлении к конвейеру 4 На конвейере 4 за счет вращения ро/шков бочки передаются в той же последовательности в два ряда (попарно или в разбивку) на накопитель 6 с неприводными ролика ми 7. Приводы 3 и 5 при этом включены. По накопителю 6 бочки продвигаются зз счет толкающего воздействия послед -:п:;; . бочек, выходящих с конвейера 4, и распо лягаются между штанга.ми 19. Поэтому lipii поступлении бочек на конвейер 4 не noiiap ric а в разбивку на накопитель 6 они yciaiiaB- ливаются плотно один к другому в так м же порядке. Первая бочка одного ряда дохпд;г; до ограничителя 15 раньше, чем первая бочка второго ряда, т. е. в одном ряду будет шесть бочек, а в другом меньше. nepBL;:i бочка одного из рядов, дойдя до равпопло чего рычага 28, поворачивает его плечо вокруг вертикальной оси 27 до упора в стонк 21 и, пройдя расстояние &; останоЕ..11каетс; коснувшись ограничителя 15. Первая бсчка второго ряда по ходу движения. .о второго плеча равноплечего рычагя 28 ьо;: давлением последующих бочек, П1 ;рает;:я г; него и поворачивает одноплечий рычаг 24 i сторону торца, преодолевая сопрот11в, пру.жины 25. Благодаря наличию рарно;,lo- чего рычага 28, плечи которого взаи. пден- ствуют с ограничителями 15. проис. формирование одинакового числа точек в каждом ряду накопителя.
В момент касания первой бочкой второго ряда ограничителя 15 (на накопителе в каждом ряду размещается по шесть бочек). вместе с отжатым в сторону торца одноплечим рычагом 24 поворачивается и выключатель 29. Выключатель 29 размыкает (фиг. и 10) связь 48 и останавливает пр11вод о. Подача бочек на накопитель 6 прекращас i- ся, а на пульт 14 управления по связи 51 lu;- ступает сигнал о возможности выгрузки DU- чек с накопителя 6.
Предварительно автопогрузчик с и.чатфср- мой 10 заезжает между направляющими 41 опоры 13, опускает вилы с платформой до касания опорных колес 40 с полом и продвигает ее вперед в направлении к накопите - лю 6 до касания упоров 36 поддона 37 в подушки 43. Роликовое полотно 30 устанавл .- вается на опорные площадки 42 опоры 13. При этом шарнирные пальцы 33, коснувшись .верхней кромки наклонной стороны упоров
44, отк. Юкяются в направлении оси в-в, а гфойдя кромку ее, падают снорза в первоначальное положение с образованием острого угла J между наклонной стороной 44 упора, преимущественно 80-90°, что препятствует соскальзыванию пальца с упора. Таким образом, платформа 10, установленная на опоре 13. надежно зафиксирована в 4-х точках от продо;1ьных перемещений вперед за счет касания упоров 36 подущки 43, назад за счет упора пальцев 33 в площадки 44, В этом положении платформа нажимает одновременно и на подпружиненные пластины выключателей 45, замыкая оба выключателя 45. Цепь 49 с последовательно вклю- чеппыми выключателями 45 и 29 через счетчик 46 импульсов замыкается и автоматически включается электропривод 9 конвейе- |ja. Штанги (9 сталкивают бочки с роликового полотна накопителя 6 по площадке 22 ;-;,) ; .;1атформу 9 и уходят вниз через зазор Mc:-:-, iy и;1Оняадкои 22 и платформой 10. Ши- jK-iiia этого зазора составляет не более 1/10 части диаметра бочки и не влияет па ее прохождение с плоп адки на платформу. После пе; 1ег.1е1цения всел 12 бочек с накопителя 6 lui платформу 10 одноплечий рычаг 24 вместе с выключателем 29 под действием пружины 26 занимает вертикальное положение. Кон1;сйер-сбрасыватель 8 работает до тех пор, пока под выключателем 29 не появляется пзычок 20 щтанги 19, находившейся :io пуска привод. 9 впизу под роликами 4. Язычс-к 20 о.;|.жимает одноплечий рычаг 24, котор1;1Й своей пластиной за.мыкает выключателе. 29, Цепь размыкается. Приво.д 9 коп- игйера-сбрасывателя 8 останавливается, а ;;ривод 5 включастся и на накопитель 6 снова );ачипают поступать бочки. Когда на накопителе сформируется вторая партия из 12 бочек, а включатель 29 размыкается и включается в работу привод 9 конвейера- сбрасывателя 8, вторая партия из бочек сдвигается штангами 19 на платформу. В связи с тем, что вся площадь платформы состоит из роликового полотна, перемещение бочек по ней не вызывает трудпостей. После того, как вторая партия бочек будет сдвинута на платформу, срабатывает счетчик 46 импульсов, который при накоплении следующих двемйд.цати бочек i-se соединяет цепь 52 привода 9 (так как настроен на два включении) .
При этом включение сталкивания возможно только после повторной установки и.чатформы 9 на опору 12 и замыкания выключателей 45.
Водитель автопогрузчика поднимает вверх платформу 9 с бочками и выезжает из направля10 цих 41 опоры 2. При этом счетчик 4 з импульсов автоматически возвраща- йтся в исходное положен.че, пастрое}1ным на
0
5
0
5
0
два включения. Грузоподъемник 11 автопогрузчика по-прежнему находится в положении на водителя под углом 10°, а роликовое полотно, на котором установлены бочки, под углом , в сторону автопогрузчика, что исключает скатывание бочек при транспортировке.
Автопогрузчик с платформой подъезжает к площадке хранения бочек с готовой продукцией, опускает платформу вниз до касания опорных колес 40 с покрытием площадки. После этого грузоподъемник переводится в положение от себя, т. е. на угол 3° к вертикальной линии. При этом роликовое полотно 30 платформы 9 стороной, не имеющей ограждения, касается покрытия площадки хранения и располагается под углом a 3+ct 8-10° к горизонту.
Угол а выбирается из условия скатывания бочек с роликового полотна платфор- .мы при выгрузке (фиг. 6).
Бочки сползают по роликам 31 вниз, а автопогрузчик вместе с платформой медленно отъезжает назад, позволяя сходящим с нее бочкам опускаться на покрытие площадки хранения в положение «На стакан, затем грузоподъемник 11 автопогрузчика переводится в положение «На себя, платформа поднимается (согласно правил транспортировки грузов) и направляется снова к опоре 13. Работа повторяется аналогичным образом.
Формула изобретения
Механизм управления приводом сбрасывателя щтучных изделий с подающего органа, содержащий закрепленный на раме последнего в зоне размещения ста.чкивателя с возможностью взаимодействия .с изделием подвижный упор и установленн1лй на раме упомянутого органа с возможностью контактирования с упором и включенный в цепь управления приводом сталкивателя датчик, отличающийся тем, что, с целью улучщения эксплуатационных характеристик путем обеспечения передачи управляющего сигнала от двух рядов правильно сориентированных изделий, подвижный упор представляет собой равноплечий рычаг, а механизм енаб- жен закрепленным в вертикальной плоскости на раме подающего органа посредством расположенной перпендикулярно последнему горизонтальной оси одноплечим рычагом, на верхнем конце плеча которого
посредством вертикальной оси закреплен упомянутый равноплечий рычаг, а нижний конец подпружинен, и ограничителями поворота равноплечего рычага, установленными на раме подающего органа с возможностью взаимодействия с каждым плечом этого
рычага.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1990 |
|
RU2043965C1 |
| Устройство для укладки в стопу плит | 1986 |
|
SU1373657A1 |
| Автомат для укладки цилиндрических изделий в пакет | 1979 |
|
SU887385A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| ТОРЦОВОЧНО-СОРТИРОВОЧНЫЙ АГРЕГАТ | 1971 |
|
SU309810A1 |
| Склад для хранения изделий | 1979 |
|
SU804545A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |




Изобретение относится к механизмам управления средств механизации погрузо- разгрузочных работ. Цель изобретения - улучшение эксплуатационных характеристик путем обеспечивания передачи управляющего сигнала от двух рядов правильно сориентированных изделий. Механизм управления приводом сбрасывателя штучных изделий с подающего органа содержит подвижный в вертикальной плоскости упор, представляющий собой равноплечий рычаг, закрепленный с возможностью ограниченного поворота в горизонтальной плоскости на вертикальном одноплечем рычаге посредством вертикальной оси. Нижним концом одноплечий рычаг посредством горизонтальной оси закреплен на раме подающего органа и может отклоняться вправо на некоторый угол подаваемыми изделиями, которые взаимодействуют с равноплечим рычагом. При этом на одноплечем рычаге закреплен датчик, включенный в цепь управления приводом подающего органа, и одноплечий рычаг в нижней своей части подпружинен. 10 ил.
А
72 77
Л JO J2 JJ 4 J/f.
18
2/7 / /
fU2.
4 44
45
/
.
28
./.х//х/ /.,
Jx 33 32 J5 ff jg
ipf/г.В
39
.x
26
Фиг.1
13
LLZ.9
| Устройство для перемещения и укладкиМЕбЕльНыХ щиТОВ | 1974 |
|
SU833467A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
