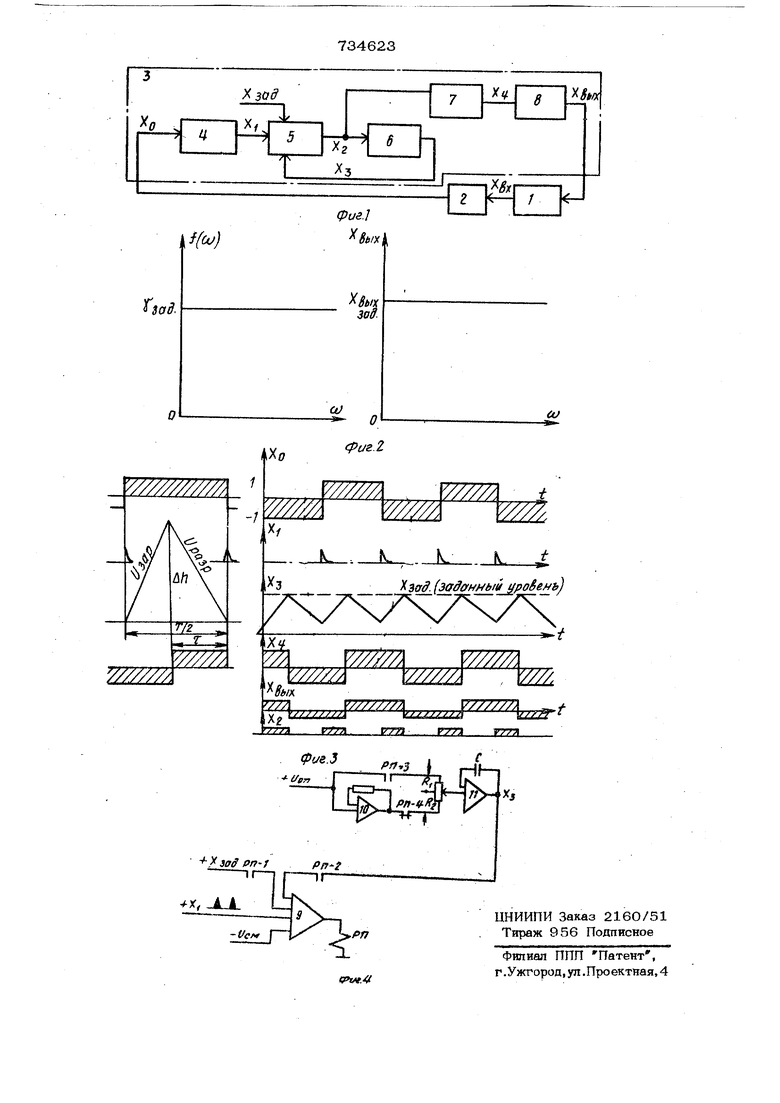
Изобретение относится к области автоматики, а именно к устройствам для получения информации о динамических свойствах объектов. Оно может быть использовано доя опредвпения оптимальных параметров настройки регуляторов в системах автоматического регулирования и, в частности для определения частотных характеристик. Известны устройства для определения частотных характеристик ij, содержащи генератор периодических колебаний на входе и регистратор на выходе обьекта, В этих устройствах фазу, соответствующую заданной частоте, получают либо в результате обработки диаграммы регистратора либо после измерения показывающими приборами -анализаторами частотных характеристик. Недостатком этих устройств является относительная сложность опредэления фазы, заключающаяся в трудоемкости обработки диаграммы (установке оптимальной скорости диаграммы, сдвиге перьев. И пр.)В первом случае к увеличении их веса и усложнении схемы - во втором. Наибоп&е близким к изобретению техническим решением является устройство для определения фазочастотной характеристики динамического объекта 2j, содержащее нелинейный элемент, аход которого соединен с выходом динамического объекта, В результате исключения сложного узла измерения фазы известное устройство упрощается и облегчается, что особенно важно для пусконаладочньк организаций, занимающихся расчетом и настройкой автоматических систем регулирования. Параметры a шIитyднo-фaзoвoй характеристики (модуль к фазу объекта) опредеЛ5пот путем математических расчетов по результатам измерения частоты и модуля автоколебаний при различных заданных значениях постоянной времени фильтра, включенного между выходом нелинейного элемеипга и входом, динамического объекта. К недостаткам устройства относятся сложность математической обработки и неоднозначная зависимость постоянной времени фильтра от определяемых параме ров. Цель изобретения увеличение быстро действия устройства, т.е. сокращение вре мени получения информации о динамических свойствах объекта в заранее выбранных, точках амплитудно-фазовой характеристики, характеризуемых заданным угло отставания. Эта цепь достигается тем, что в устройство введены интегратор и последовательно соединенные импульсатор, сигнумреле, триггер и делитель, выход которого подключен ко входу динамического объекта, причем ьход и выход интегратора соединены с соответствующи О1 выходом и входом сигнум-реле, На фиг. 1 представлена структурная схема устройства, на фиг. 2 - фазочастотная и амплитудно-частотная характеристики послевключенного звена, на фиг, 3 - эпюра сигналов послевключенного звена с выделенной эпюрой сигналов одного цикла (полупериода) на фиг. электрическая схема интегратора. Устройство для определения фазочастотной характеристики динамического объекта 1 содержит нелинейный элемент (элемент сравнения) 2, послевключенное звено 3, в состав которого входят импульсатор 4, сигнум-реле 5, интегратор 6, триггер 7 со счетным входом и делитель 8, Интегратор (фиг. 4) включает в себя операционные усилители 9-И, Устройство работает следующим обраaofvi. Сигнал -Qf, объекта 1 исследования воздействует на нелинейный элемент 2,. который формирует релейную характеристику с выходным сигналом XQ , сдвинутым по фазе на . В контуре возникает автокопебапгапьный режим, при кото ром должен соблюдаться баланс фаз, т,е. JtVo ГД8 - угол отставания послевключе ного звена 3, (fp- угол отставания объекта иссле дования. Если послевключенное звено 3 имеет фазочастотные и амплитудно-частотные характеристики, показанные на фиг, 2, то для любой частоты можно записать: If e-tSO-T Таким образом, установив угол согласно выражению (1) на послевклк ченном звене и измерив частоту (и амплитуду) сигнала после того как установится автоколебательный режим, мы получим информацию об интересующей нас точке фазочастотной характеристики, характеризуемой углом Ifo , Измерение осуществл5пот следующим образом (см, фиг. 3). Единичный сигнал Хо с выхода нелинейного элемента со знаком, противоположным входному сигналу, воздействует на импульсатор 4, в результате чего при каждом перекидывании формируется кратковременный импульс Х заставляющий срабатьшать сигнум-реле 5, которое блокируется сигналом заданного уровня Хэаб« Сигнум-реяе включает интегратор 6 на заряд емкости (возрастание сигнал X-j со скоростьюУл4).При равенстве сигналов Хз и К сигнум-реле возвращается в первоначальное состояние и переключает интегратор на разряд. При этом сигнал Ч убьшает со С15:оростью Уразр до тех пор, пока не произойдет новое перекидьтание. После этого цикл повторяется. Каждое переключение сигнум-реле в исходное состояние вызьюает переключение триггера 7 со счетным входом, сигнал которого подается на делитель 8. Согласно эпюре фиг, 3, фаза, уст&новленная на устройс гве, СТ/2)-Тг T-1ZT (2) где Т - период колебаний; tr- время отставания входных колебаний от выходных. Представляя уравнение (2) в выраж- ние (1), будем иметь Учитывая, что V .-AiL, 3qp(r|a)-t: V- Ь . раър tr где -iill величина изменения сигнала на интеграторе, .окончательно получают: Для определения периода колебаний используется информация, полученная при измерении A|i j согласно уравнению (4) с учетом уравнения (5) Т--2 , (7) Линейность шкапы установки угла и шкалы измерения периода достигается применением реверсируемого сигнум-рел интегратора, соотношение скоростей которого устанавливается делителем емкос тей или сопротивлений. Так, для интегра тора 4, выполненного на электронной ап ратуре с делителем сопротивлений К/VК (8) разр- (9) где К - постоянная величина, определяе мая опорным напряжением} С. - емкость интегратора 1)2 «сопротивление интегратора. Подставив выражения (8) и (9) в уравнения.(6) и (7), получим: (KfRf ) ICК. V CkW cVCK/R) CiciR.CKMRaC) Отсюда следует, что если сумма . постоянна, то фаза линейно зависит от величины установленного сопротивления R, а период линейно зависит от изм ряемой величины fikli при постоянной величине тг , которая в данном приборе служит для изменения пределов : шкалы,, Интегратор работает следующим обра зом. До прихода импульсного сигнала Х/( на операционньхй усилитель 9, работак ший в релейном режиме, рапе РП находи ся в исходном состоянии (условно принятое за отключенное) за счет смещения и г .Под действием импульсного сигн ла реле срабатьшает и блокируется контактами РП-1. Операционный усилитель 11, работающий в режиме интегратора, посредством контактов РП-3 включается на заряд емкости 6, Сигнал X з возрастает, до тех пор, пока не станет равным , после чего реле РП возвращается в исходное состояние. Контакты РП-3, РП-2, РП-1 размыкаются, а контакт РП-4 включает ингг&гратор на разряд - на инвертированное операционным усилителем Ю опорное на пряжение (Don ) Сигнал Хз убывает пр этом до тех пор, пока следующий сигнал Х не заставит сработать реле РП. Пос ле этого цикл повторяется. 6236 Качество работы промышленных автоматических систем регулирования во многом определяется методами ILX оптимизации при введении в эксплуатацию. В настоящее время доказано, что наиболее совершенными являются частотные методы, при которых используются в качестве информации амплитудно-фазовые характеристики объекта регулирования. Пусконаладочные организации не могут использовать эти методы из-за отсутствия простых и легких приборов для снятия частотных характеристик, большах трудозатрат и времени для сняти и обработки этах характеристик. Предложенное устройство позволяет повысить точность измерений и сократить количество экспериментов за счет определения параметров амплитудно-фазовой характеристики в требуемых точках, сократить время и трудозатраты за счет исключе1шя вычерчивания графиков и И.Х обработки. При этом работа может быть выполнена наладчиками более низкой квалификации. Устройство обеспечивает вполне достаточную точность, оно не дороже серийно выпускаемых регуляторов, вес устройства не превышает 7-8 кг, а ремонт вполне может быть выполнен в мастерских контрольно-измерительных, приборов. Формула изобретения Устройство для опредапешш фазочастотной характеристики динамического объекта, содержащее нелинейный элемент, вход которого соединен с выходом динамического объекта, отличаюше с я тем, что, с целью увеличения быстродействия устройства, оно содержит интеграттор и последовательно соединенные имгпульсатор, сигнум-реле, триггер и делитель, выход которого подключен ко в.ходу динамического объекта, причем вход и выход интегратора соединены с соотвeтcтвyющ ш выходом и входом сигнумреле. Источники информации, принятые во внимание при экспертизе 1.Балакирев В. С, и др. Экспериментальное определение динамических характеристик промышленных объектов управления М , Энергия, 1967, с. 10-11. 2.Авторское свидетшшство СССР 253207, кл. GOS В 13/02, 1968 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный полосовой фильтр | 1977 |
|
SU622040A1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Резонансный уровнемер | 1981 |
|
SU974135A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1965 |
|
SU174866A1 |
| Устройство для коррекции электрогидравлических систем нагружения | 1982 |
|
SU1059540A1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |