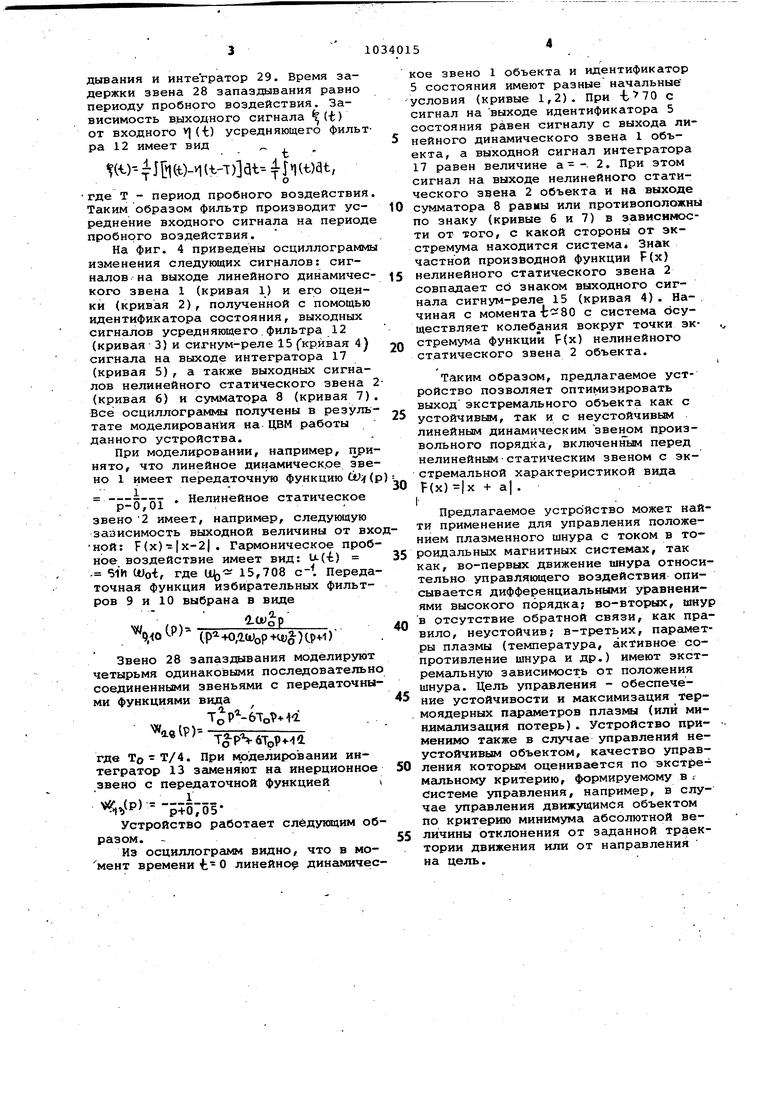
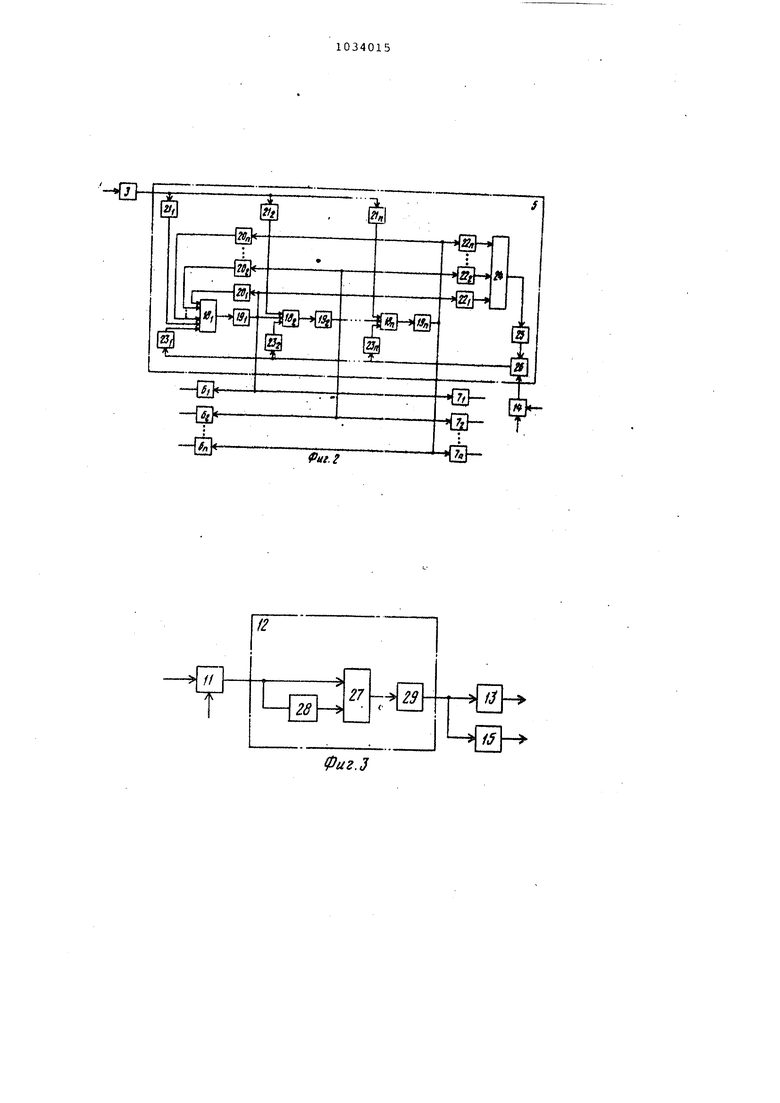
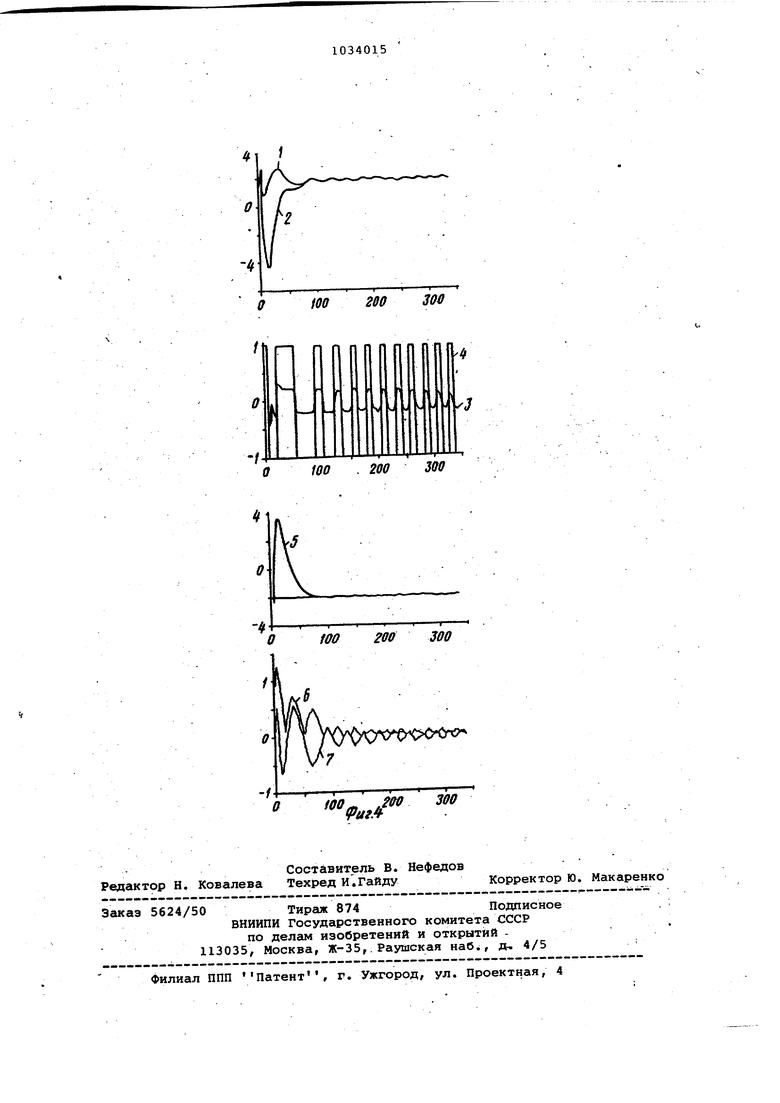
Изобретение относится к автомати ческому управлению, в частности к управлению динамическими объектами, имеющими экстремальную зависимость вЫхХодной величины от одной переменной, Известны устройства для экстремального управления объектами с устойчивой линейной частью произвольно го порядка, основанные на принципе синхронного детектирования, ряд из которых обеспечивает максимальное быстродействие и инвариантность к частоте пробного воздействия ij H Однако при неустойчивой линейной части объекта указанные устройства неработоспособны. Наиболее близким к предлагаемому является устройство для управления неустойчивым экстремальным объектом состоящим из последовательно соединенных неустойчивого линейного динамического звена и нелинейного статического звена, содержащее первый блок усилителей, первый избиратель ный фильтр и последовательно соедине ные генератор пробного воздействия, .первый сумматор, идентификатор состо яния второй блок усилителей, второй сумматор, второй избирательный фильтр, и1:рвый блок y;v HO KeHHfi, усредняющий фильтр и первый интегратор подключенный выходом ко второму входу первого суг.1матора, соединенного выходом со входом объекта, подключен ного выходом через -первый избиратель ный фильтр ко второму входу- первого блока умножения, вход первого блока усилителей подключен к выходу идентификатора состояния, а выход - к третьему входу первого сумматора L- Известное устройство неработоспособно при отсутствии контролируемого выхода линейной части объекта. Цель - расширение функциональных возможностей устройства. Поставленная цель достигается тем что в устройство введены последовательно соединенные сигнум-реле, второй блок умножения, третий ciTviMaTop и второй интегратор, подключенный выходом к второму входу второго сумматора, соединен.ного выходом со вторым входом третьего сумматора, вход сигнум-реле подключен к выходу усредняющего, фильтра, второй блок умно ясения подключен вторым входом к выходу объекта управления, а выходом к второму входу идентификатора состояния . На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг.2 пример блок-схем1.1 идентификатора состояния; На фиг, 3 - пример блоксхемы усредняющего фильтра; на фиг. 4 - эпюры напряжений. Устройство(фиг. 1) содержит объект управления, состоящий из неустойчивого линейного динамического звена 1 и нелинейного статического звена 2, первый сумматор 3, генератор 4 пробного воздействия, идентификатор 5 состояния, первый и второй блоки б и 7 усилителей 6. , . . . . о . , б- , 7 ,,.., 7у,, второй сумматор 8, первый и второй избирательные фильтры 9 и 10, первый блок 11 умножения, усредняющий фильтр 12, первый интегратор 13,второй блок 14 умножения, сигнум-реле 15, третий сумматор 16, второй интегратор 17, Неустойчивое линейное динамичес кое звено 1 имеет п-ый порядок, а нелинейное статическое звено 2 имеет экстремальную характеристику вида F(x) X + а , где F (х) - выходной сигнал звена; х - входной сигнал; а - неизвестная величина. Генератор 4 генерирует гармоническое пробное воздействие. Идентификатор 5 состояния построен на базе модели линейного динамического звена 1 полной размерности. Идентификатор состояния полной размерности (фиг, 2) содержит сумматоры 18 , . . . , 18У), интеграторы 19, , .,., 19и, усилители 20/,,.,., 20j, ...,2ij ,.,.,21,22., .,,,,2 а,, ,.., 23yi, сумматор 24,инвертор 25, сумматор 26. Блоки 6 и 7 состоят ка;едый из И усилителей. Коэффициентами усиления усилителей 6 , . . . , 6 у задаются желаемые динамические свойства системы, вклю1.агг запас устойчивости. Выбором коэффициентов усиления усилителей 7 , . , . , 7у) обеспечивается формирование на выходе сумматора 8 из оценок переменных состояния линейного динамического звена 1 объекта, получаемых навыходе идентификатора 5 состояния, оценки входного сигнала нелинейного статического звена 2. На частоте пробного воздействия сигналы на выходе нелинейного стати fecKOro звена 2 и выходе сумматора 8 совпадают по фазе или сдвинуты на 180 друг относительно друга в зависимости от того, на какой ветви экстремальной характеристики, восходящей или нисходящей, находится система,что обеспечивает системе максимальное быстродействие и смещение состояния устройства в сторону экстремума. Избирательные фильтры 9 и 10 имеют, одинаковую структуру и настроены на частоту пробного воздействия генератора 4. Блок 11 умножения и усредняющийf фильтр 12 представляет собой реализацию синхронного детектора. Усредняющий на периоде пробного воздействия фильтр 12 (фиг. 3) содержит сумматор 27, звено 28 запаздывания и интегратор 29. Время задержки звена 28 запаздывания равно периоду пробного возлействия. Зависимость выходного сигнала (t) от входного VJ (-t) усредняющего фильт ра 12 имеет вид ())-vnt-T)at-- hwat, о где Т - период пробного воздействия Таким образом фильтр производит усреднение входного сигнала на период пробного воздействия. На фиг. 4 приведены осциллограмм изменения следующих сигналов: сигналов на выходе линейного динамичес кого звена 1 (кривая 1) и его оценки (кривая 2), полученной с помощью идентификатора состояния, выходных сигналов усредняющего.фильтра 12 (кривая 3) и сигнум-реле 15 (кривая 4) сигнала на выходе интегратора 17 (кривая 5), а также выходных сигналов нелинейного статического звена (кривая 6) и сумматора 8 (кривая 7) Всё осциллограммы получены в резуль тате моделирования на-ЦВМ работы данного устройства. При моделировании, например, при нято, что линейное динамическре эве но 1 имеет передаточную функцию ОУ;( ( 1 Нелинейное статическое звено 2 имеет, например, следующую зависимость выходной величины от вх ной: F(x). Гармоническое проб ное воздействие имеет вид: u(-t) . sin Шо-t, где WQ- 15,708 сЧ Переда точная функция избирательных фильтров 9 и 10 выбрана в виде V/ (р), 9,0 1 (р +ОДШор-н«)()Звено 28 запаздывания моделируют четырьмя одинако выми последовательн соединенными звеньями с передаточны ми функциями вида Т Р -бТоЬП а«1Р)т р бТрриагде . При моделировании интегратор 13 заменяют на инерционное звено с передаточной функцией WP) -5+ЫУстройство работает следующим об разом. Из осциллограмм видно, что в момент времени линейно динамичес кое звено 1 объекта и идентификатор 5 состояния имеют разные начальные условия (кривые 1,2). При -Ь70 с сигнал на выходе идентификатора 5 состояния равен сигналу с выхода линейного динс1мического звена 1 объекта, а выходной сигнал интегратора 17 равен величине а -. 2. При этом сигнал на выходе нелинейного статического звена 2 объекта и на выходе сумматора 8 равны или противоположны по знаку (кривые 6 и 7) в зависимости от того, с какой стороны от экстремума находится система Знак частной производной функции F(x) нелинейного статического звена 2 совпадает со знаком выходного сигнала сигнум-реле 15 (кривая 4}. Начиная с момента-Ь-ВО с система осуществляет колебания вокруг точки экстремума функции F(x) нелинейного статического звена 2 объекта. Таким образом, предлагаемое устройство позволяет оптимизировать выход экстремального объекта как с устойчивым, так и с неустойчивым линейным динамическим звеном произвольного порядка, включенным перед нелинейным-статическим звеном с экстремальной характеристикой вида F(x)|x + а.. Предлагаемое устройство может найти применение для управления положением плазменного шнура с током в тороидальных магнитных системах, так как, во-первых движение шнура относительно управлякадего воздействия описывается дифференциальными уравнениями высокого порядка; во-вторчах, шнур в отсутствие обратной связи, как правило, неустойчив; в-третьих, паргилетры плазмы (температура, активное сопротивление шнура и др.) имеют экстремальную зависимость от положения шнура. Цель управления - обеспечение устойчивости и максимизация термоядерных параметров плазмы (или минимализация потерь). Устройство применимо также в случае управлений неустойчивым объектом, качество управления которым оценивается по экстремальному критерию, формируемому в; системе управления, например, в случае управления движущимся объектом по критерию минимума абсолютной величины отклонения от заданной траектории движения или от направления на цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НЕУСТОЙЧИВЫМ ЭКСТРЕМАЛЬНЫМ ОБЪЕКТОМ, СОСТОЯЩИМ из последовательно соединенных неустойчивого линейного динамического эвена и нелинейного статического эвена, содержащее первый блок усилителей, первый избирательный .фильтр и последовательно соединенные генератор пробного воздействия. Первый сумматор, идентификатор состоя- «etntt « t «if W ч 44 Kf О ния, второй блок ус.илителей, второй . сумма.тор, второй избирательный фильтр первый блок умножения, усредняющий фильтр и первый интегратор, подключен ный выходом ко второму входу первого сумматора, соединенного выходом с входом объекта, подключенного выходом через первый избирательный фильтр ко второму входу первого блока умно.жения,вход первого блока усилителей подключен к выходу идентификатора состояния, а выход - к треть ему входу первого сумматора, отличающееся тем, что, с целью расширения функциональных возможностей устройства, введены последовательно соединенные сигнум-реле, второй блок умножения, третий сумматор и (/ второй интегратор, подключенный вы:ходом к второму входу второго сумматора, соединенного выходом со вторым входом третьего сумматорЪ, вход сигнум-реле подключен к выходу усредняющего фильтра, второй блок умножения подключен вторым входом к выходу объекта управления, а выходом - к второму входу идентификатора состояния.. .% t Ю 9u.f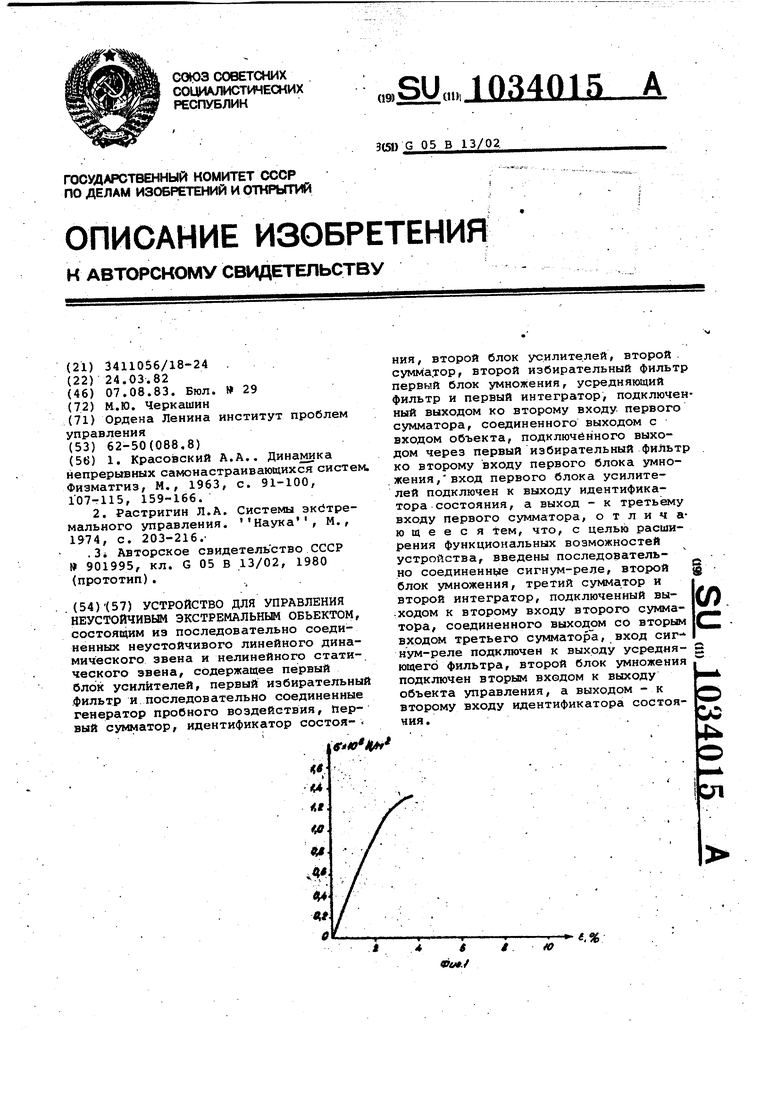
fl
j5
фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Диналшка непрерывных самонастраивающихся систем | |||
| Физматгиз, М., 1963, с | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Растригин Л.А | |||
| Cиcтe ы экйтреНаука М., мального управления | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Эксцентричный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию и т.п. работ | 1924 |
|
SU203A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
