I
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для коррекции систем автоматического регулирования, к динамическим характеристикам которых предъявляются повышенные требования.
Известны нелинейные фильтры, предназначенные для раздельного формирования амплитудной и частотной характеристик системы автоматического регулирования 1, 2.
Из известных нелинейных фильтров наиболее близким по технической сущности является нелинейный фильтр, содержащий два блока коррекции, входы которых подсоединены ко входу фильтра, и сумматор 2.
Однако устройство-прототип вносит амплитудные и фазовые искажения в диапазоне фильтрации, и использование его в качестве фильтра низких частот приводит к у меньшению быстродействия корректируемой системы, так как оно подавляет все входные сигналы, следующие с частотой, выше настроечной.
Целью изобретения является повышение точности и расширение области применения нелинейных корректирующих устройств для коррекции систем автоматического регулирования.
Цель достигается за счет того, что в известный нелинейный фильтр дополнительно введены два сигиум-реле, блок согласования и блок умножения, к первому входу которого подключены входы блоков коррекции, ко второму входу через блок согласования - выход сумматора, первый и второй входы которого соединены соответственно через первое и второе сигнум-реле с выходами первого и второго блоков коррекции, а выход блока умнонсения соединен с выходом устройства.
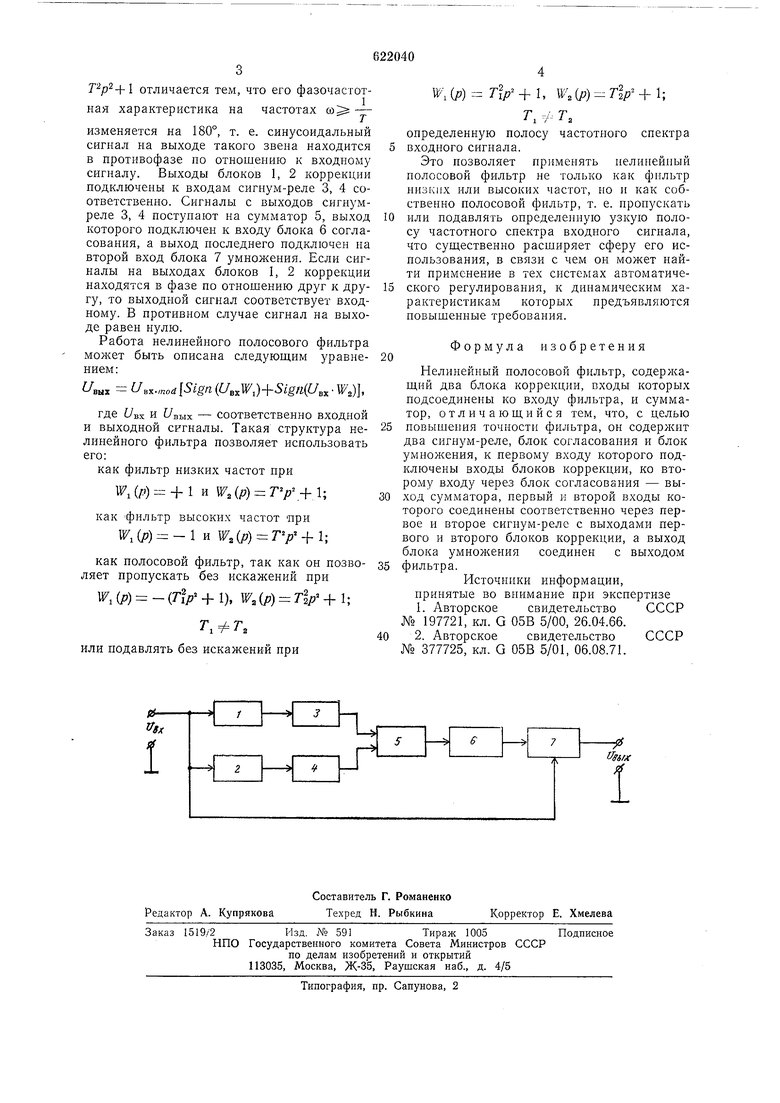
На чертеже представлена структурная схема нелинейного полосового фильтра. Она содержит первый 1 и второй 2 блоки коррекции, -первое 3 и второе 4 сигнум-реле, сумматор 5, блок 6 согласования и блок 7 умножения.
Нелинейный полосовой фильтр работает следующим образом.
Входной сигнал поступает одновременно на оба блока 1 и 2 коррекции и на первый вход блока 7 умножения.
В общем виде передаточные функции блоков 1, 2 коррекции имеют следующий вид:
V(,(p) Tlp + l, W,(p) Tlp + l,
где р - символ дифференцирования. Звено с передаточной функцией типа отличается тем, что его фазочастотная характеристика на частотах со - изменяется на 180°, т. е. синусоидальный сигнал на выходе такого звена находится в противофазе по отношению к входному сигналу. Выходы блоков 1, 2 коррекции подключены к входам сигнум-реле 3, 4 соответственно. Сигналы с выходов сигнумреле 3, 4 поступают на сумматор 5, выход которого подключен к входу блока 6 согласования, а выход последнего подключен на второй вход блока 7 умножения. Если сигналы на выходах блоков I, 2 коррекции находятся в фазе по отношению друг к другу, то выходной сигнал соответствует входному. В противном случае сигнал на выходе равен нулю. Работа нелинейного нолосового фильтра мол;ет быть описана следующим уравнением : вы: f/Bx., Sign (U,W,)+Sign(U,. W,), где (Увх и f/вых - соответственно входной и выходной сигналы. Такая структура нелинейного фильтра позволяет использовать его: как фильтр низких частот при 1F,(0- + 1 и W,{p) как фильтр высоких частот при w,(p) -l и w,(p} TY + i; как полосовой фильтр, так как он позволяет пропускать без искажений при W.(P) - (Tip + 1), W, (р) Tip + 1; , или подавлять без искажений при ((р) , W,(p) Tlp + ; Т. h Т, определенную полосу частотного спектра входного сигнала. Это позволяет применять нелннейиый полосовой фильтр не только как фильтр низких или высоких частот, но и как собственно полосовой фильтр, т. е. пропускать или подавлять определенную узкую полосу частотного спектра входного сигнала, что существенно расширяет сферу его иснользования, в связи с чем он может найти нрименение в тех системах автоматического регулирования, к динамическим характеристикам которых предъявляются повышенные требования. Формула изобретения Нелинейный полосовой фильтр, содерлсащий два блока коррекции, входы которых подсоединены ко входу фильтра, и сумматор, отличающийся тем, что, с целью повышения точности фильтра, он содерл ;ит два сигнум-реле, блок согласования и блок умножения, к первому входу которого подключены входы блоков коррекции, ко второму входу через блок согласования - выход сумматора, первый и второй входы которого соединены соответственно через первое и второе сигнум-реле с выходами первого и второго блоков коррекции, а выход блока умнол:ения соединен с выходом ильтра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 197721, кл. G 05В 5/00, 26.04.66. 2. Авторское свидетельство СССР 377725, кл. G 05В 5/01, 06.08.71.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Устройство для автоматической настройки компенсации емкостных токов в электрических сетях | 1984 |
|
SU1257745A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Система автоматического управления барабанной мельницей | 1986 |
|
SU1386302A1 |
