(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2115213C1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1979 |
|
SU860254A2 |
| Электропривод переменного тока | 1987 |
|
SU1436260A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Устройство для управления асинхроннымТРЕХфАзНыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813638A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем (его варианты) | 1980 |
|
SU928587A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1983 |
|
SU1206944A1 |
| Устройство для реверсивного бесщеточного возбуждения синхронной машины | 1986 |
|
SU1403335A2 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Устройство для управления трехфазным асинхронным двигателем | 1978 |
|
SU919035A1 |
1
Изобретение относится к электротез&нике и может быть использовано в эпек- троприводах переменного тока.
Известно устройство для регулирования скорости вращения асинхронного двигателя, содержащее реверсивный тиристор- ный регулятор напряжения, подключенный к обмоткам статора двигателя, блок фазоимпульсного управления, регулятор скорости и тахогенератор на валу двигате- .ля l.
Недостатком известного устройства является низкое качество переходных 1фоцессов при пуске и регулировании скороо ти вращения двигателя,
Наиболее близким к предлагаемому изобретению является устройство дая ре гулирования скорости асинхронного двигателя, содержащее реверсивный тиристорный регулятор напряжения, подключенный 20 к обмоткам статора двигателя, последовательно соединенные датчик скорости на валу двигателя, perynsrrop скорости, узед юрмйрования характеристики и логический переключающий блок, выходь которого соединены с первыми входами распределителей управляющих импульсов, подключенных к входам реверсивного тиристорного регулятора напряжения, фазорегулятор, выход которого соединен с вторыми входами распределителей управляющих импульсов 2.
Недостатком этого устройства являетчся невозможность однозначного протекания переходного процесса при изменении начальных координат рабочей точки привода вследствие нелинейности системы управления привода переменного тока.
Целью изобретения является повышение качества переходного процесса в широком диапазоне изменения скорости.
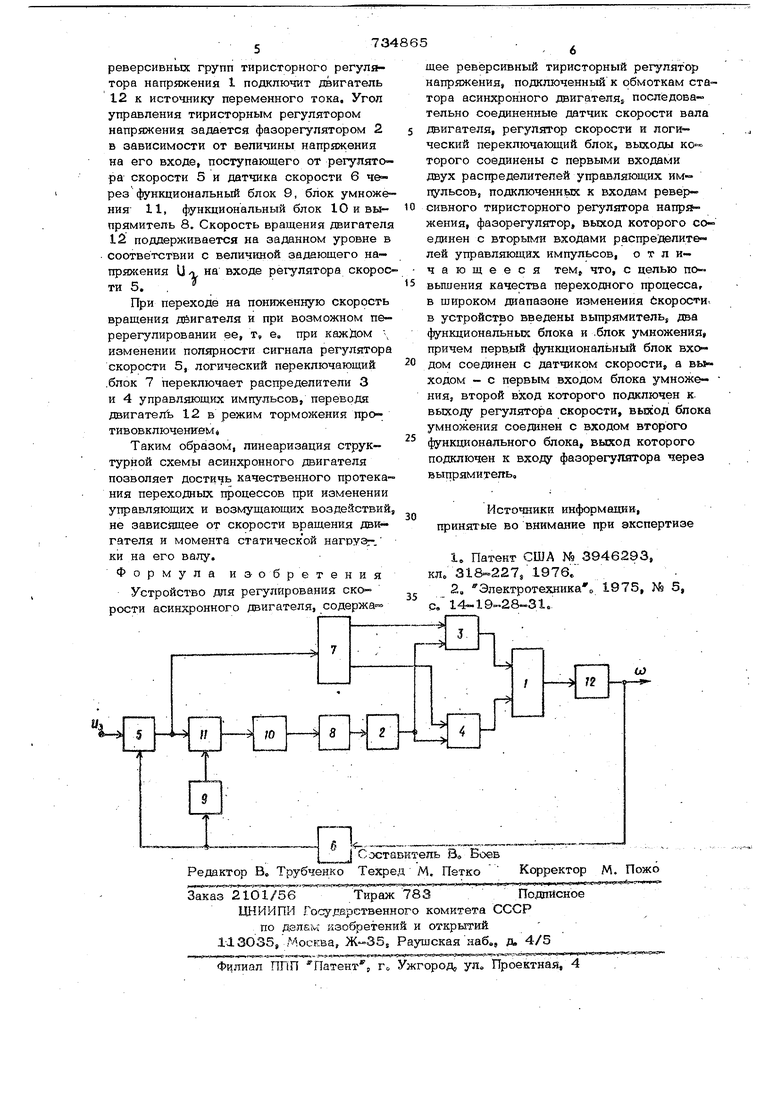
Цель достигается тем, что в ycTpoltство введены вьшрямитель, два функциональных блока и -блок умножения, при-чем первый функциональный блок входом соединен с датчиком CKopocrvi, а выходом - в первым входом блока умножения, второй вход которого соедянен с выходом регулятора скорости, а выход бпока умножёния - с входом второго функциональ кого блока, выход которого соединен с входом фазорегулятора череЬ вьтрямител На чертеже показана блок-схема устройства;Оно состоит из реверсивного тирис- торного регулятора напряжения 1| фазорегулятора 2, Лодключенного к входу распределителей 3 и 4 управляющих импульсов, регулятора скорости 5j соединенного с выходом датчика скорости 6, логического переключающего блока 7, выпрямителя 8, функциональных блоков 9 и 1О, блока умножения 11 и асинхрон ного.двигателя 12. К входу регулятора скорости 5 подключен выход датчика ско рости б на валу асинхронного двигателя 12, обмотки статора которого подкл1с чены к источнику переменного тока через реверсивный тиристорный регулятор напряжения 1, Выход регулятора скорости 5 соединен с входами блока умножения 11 и логического переключающего блока 7, д&а выхода которого соедщ1ены с управляющим входом реверсивного тиристорного регулхггора напряжения 1 через распределители 3 и 4 управляющих импульсов. Датчик скорости б образует последовательное соединение с первым фун ционапьным блоком 9, блоком умножения 11, вторым функциональным блоком 10, выпрямителем 8 и фазорегулятором 2, причем выход последнего соединен с вхо дом распределителей 3 и 4 управляющих импульсов. В устройстве осуществляется техни- ческая линеаризация асинхронного даига теля, электромагнитный момент которого в зависимости от скольжения определяет ся формулой К MV,,S ) - максимальный электромаг нитньй момент И скольжение двигателя на ecTej твенной характеристике} -. Ф - относительное значение напряжения первой гармоники на базе двигател В соответствии с формулой (1) пер- вьй из функциональньк блоков должен преобразовывать сигнал UjjyOT датчика скорости в значение J o- uuJ CUu/cT u, - 0734865деУ... и и, - сигналы от датчика скоLUr) рости, соответствующ о синхронной и критической скорости двигателя, а второй функциональный блок должен существлять операцию извлечения квадатного корня из сигнала, поступающео от блока перемножения, В результате инеаризации формула (1) для момента вигателя примет вид: %-л;;, а передаточная функция двигателя запищется так: outP) NV.где .,p - приведенный момент инерции привода. В предложенном устройстве функциональный блок 9 производит преобразование входного сигнала Уц, от датчика скорости 6 в значение 2(Ми;„-иа;- Ше«ш функциональный блок 10 осуществляет операцию извлечения квадратного корня из входного сигнала, поступающего от бло-, ка умножения 11, в результате чего напряжение на выходе блока 10 определяется равенством () U.Ju 2( Up - напряжение на выходе регулятора скорости, в результате чего обеспечивается компенсация соответствук щих нелинейностей асинхронного двигателя. Устройство работает следующим об разом. В исходном положении напряжение заданияи на входе регулятора скорости 5 равно нулю, двигатель 12 неподвижен, так как отсутствует сигнал с выхода логического переключающего блока 7. При подаче управляющего напряжения на вход регулятора скорости 5, последний включит логический переключающий блок 7, Который подаст сигнал на первый вход распределителя 3 или 4 управляющих импульсов в зависимости от полярности сигнала регулятора скорости 5. Одна из
