посредством реверсивного счетчика соединены со входами сигнализаторов выглублеHHJT и заглубления.
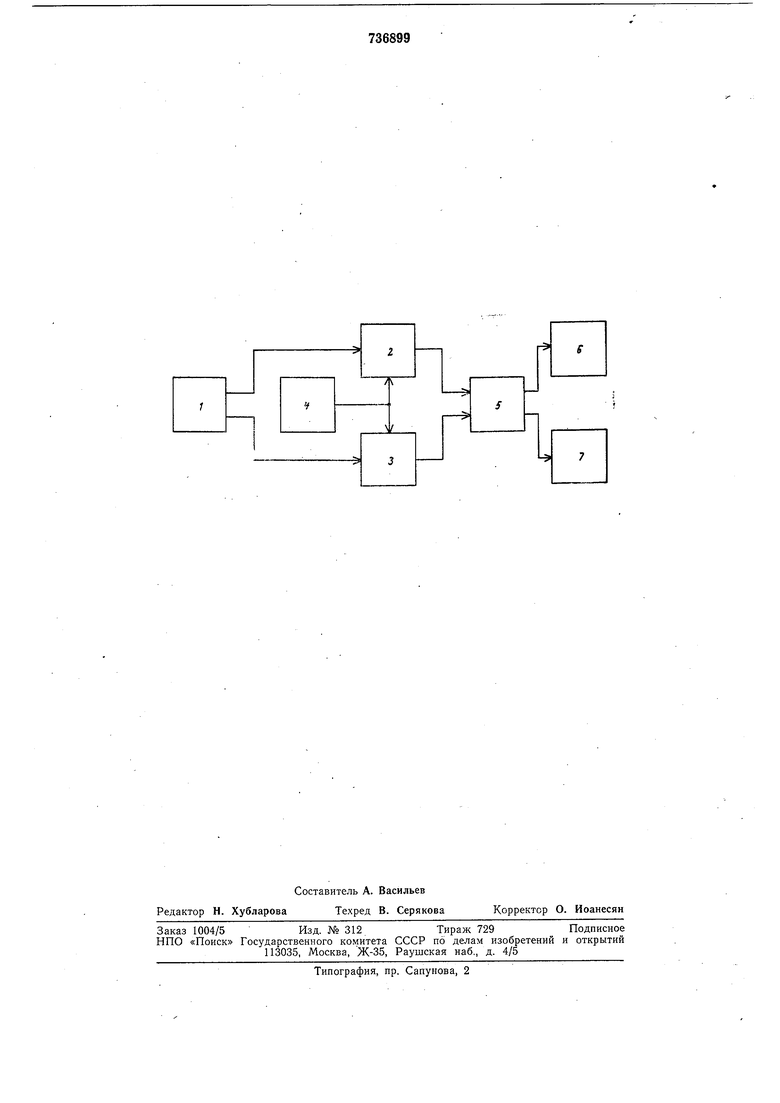
На чертеже представлена блок-схема предлагаемого устройства.
В устройство входят: датчик 1 глубины хода рабочих органов, элементы разрешения 2 и 3, генератор 4 импульсов, реверсивный счетчик 5, сигнализаторы 6 выглубленця и 7 заглубления. Один из входов элемента разрешения 2 соединен с выходом датчика 1, с которого поступают сигналы при выглублении рабочего органа. Один из входов элемента разрешения 3 соединен с выходом датчика 1, с которого поступают сигналы при заглублении рабочего органа. К другим входам элементов разрешения 2 и 3 подключен выход генератора 4 импульсов. Выход элемента разрешения 3 подключен к входу прямого счета реверсивного счетчика 5, а выход элемента разрешения 2 подключен к входу обратного счета реверсивного счетчика 5. Выход счетчика 5, соответствуюш,ий младшему разряду, соединен с сигнализатором 6 выглубления, а выход счетчика 5, соответствуюш,ий старшему разряду, соединен с сигнализатором 7 заглубления.
Устройство работает следуюш им образом.
При заглублении рабочего .органа, превышаюш,ем зону нечувствительности датчика 1, на соответствуюшем выходе датчика 1 формируется потенциал, который поступает на один из входов элемента разрешения 3. При этом условии импульсы, поступающие с генератора 4 на другой вход элемента разрешения 3, проходят на выход элемента 3 и далее поступают на вход прямого счета реверсивного счетчика 5. Счетчик 5 осуш,ествляет подсчет импульсов. Если заглубление уменьшилось и не превышает зоны нечувствительности датчика 1, потенциал на соответствующем выходе датчика 1 становится равным нулю, элемент разрешения не пропускает импульсы на вход прямого счета реверсивного счетчика 5, подсчет импульсов прекращается, и в счетчике 5 остаётся записанным определенное число, например, 16.
При выглублении рабочего органа, превышающем зону нечувствительности датчика 1, на другом выходе датчика 1 формируется потенциал, который поступает на один из входов элемента разрешения 2. При этом условии импульсы, поступающие с генератора 4 на другой вход элемента разрешения 2, проходят на его выход и поступают на вход обратного счета реверсивного счетчика 5. Количество поступающих
на этот вход счетчика 5 импульсов вычитается из записанного в нем ранее числа. Если выглубление умеиьщилось и не превьппает зоны нечувствительности датчика 1, потенциал на соответствующем входе датчика 1 становится равным нулю и поступление сигналов на вход обратного счета реверсивного счетчика 5 прекращается. В счетчике 5 остается записанньш результат вычитания, например, число 8.
Если записанное в счетчике число не равно нулю или максимальному числу, которое может быть зацисано в данном счетчике, то потенциал на обоих его выходах
равен нулю, а сигнализаторы выглубления и заглубления отключены.
Если же, например, заглубление рабочего органа приобретет устойчивый характер, т. е. увеличится средняя глубина его хода,
в счетчике 5 постепенно будут заполнены все разряды и будет записано максимально возможное число (во всех разрядах будет записана единица). На соответствующем выходе счетчика 5 формируется потенциал,
который поступает на включение сигнализатора 7 заглубления. В том случае, если заглубление рабочего органа примет устойчивый характер, т. е. уменьщится средняя глубина его хода, в счетчике 5 постепенно
будут записаны во всех разрядах нули, и на другом выходе счетчика 5 сформируется потенциал, который поступает на включение сигнализатора 6 выглубления.
Формула изобретения
Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий, содержащее датчик глубины хода рабочих органов и
сигнализаторы заглубления и выглубления, отличающееся тем, что, с целью повышения надежности работы, оно снабжено генератором импульсов, элементами разрещеиия, причем входы последних подключены к выходам датчика глубины и к выходу генератора импульсов, а выходы посредством реверсивного счетчика соединены со входами сигнализаторов выглубления и заглубления.
Источники информации, принятые во внимание при экспертизе
1.Гельфенбейн С. П., Неволько Н. М. К разработке систем контроля технологических параметров, М., Тр. ВИМ, т. 53, 1974, с. 54.
2.Лурьев А. Б. и др. Автоматический контроль глубины хода рабочих органов почвообрабатывающих и посевных машин.
Л., Тр. ЛСХИ, т. 248, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий | 1983 |
|
SU1094587A2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЛУБИНЫ ХОДА РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2309567C2 |
| Система управления рабочим органом землеройной машины | 1988 |
|
SU1548365A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1981 |
|
RU1055199C |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ИЗМЕНЕНИЯ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ КУЛЬТИВАТОРОМ, ПЕРЕМЕЩАЕМЫМ ЭНЕРГЕТИЧЕСКИМ СРЕДСТВОМ С ТРЕХТОЧЕЧНОЙ НАВЕСКОЙ | 2022 |
|
RU2806157C1 |
| Переносной шахтный сигнализатор метана | 1989 |
|
SU1634806A1 |
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1983 |
|
SU1101525A2 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |