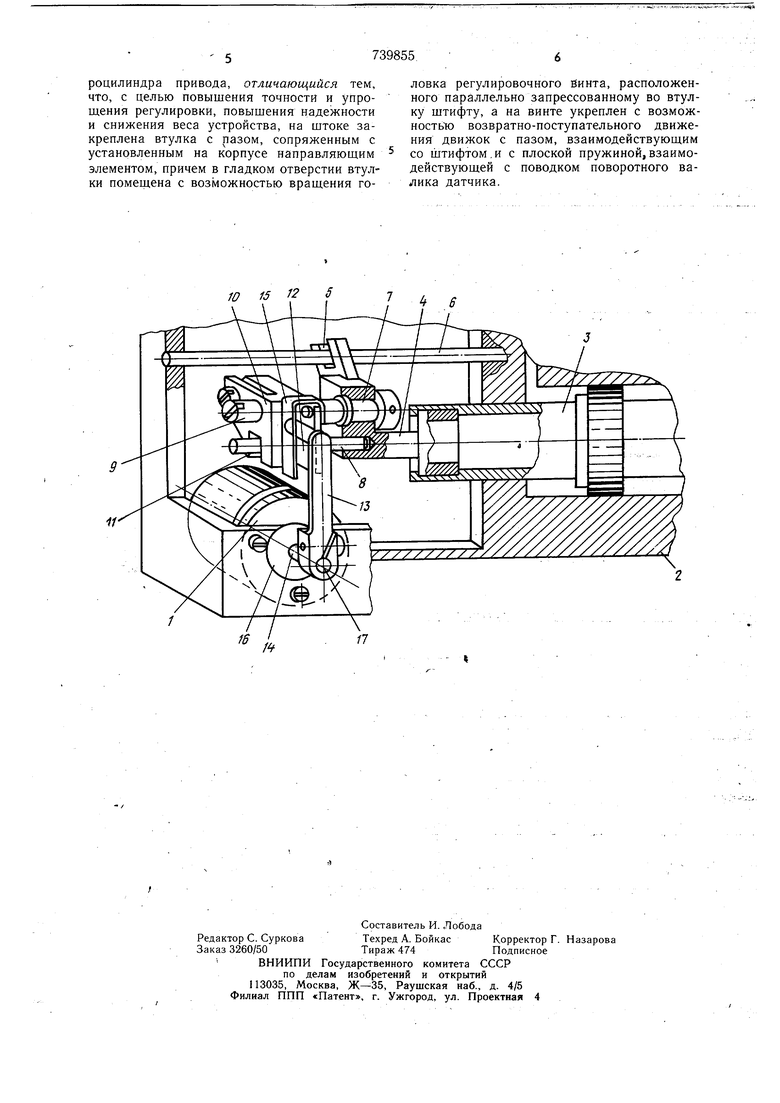
ня обеспечивается пружиной растяжения, имеющей различное усилие прижатия при втянутом и выдвинутом поршне, а также значительные габариты даже при малых ходах поршня. При точной регулировке электрической нейтрали необходимо проворачивать статор датчика от руки на угол 1,5-3. При этом электрические провода, идущие от датчика также становятся подвижными, что не исключает их повреждения, а следовательно снижает надежность узла. Кроме того, при использовании вмногоканальных приводах агрегатов в модульном исполнении из-за необходимости обеспечения подхода к корпусам датчиков при их точной регулировке увеличиваются габариты агрегата. Цель изобретения - повышение точности работы, упрощение регулировки, повышение надежности узла и снижения его веса. Это достигается тем, что в предлагаемом узле на штоке закреплены втулка с пазом, сопряженным с установленным на корпусе направляющим элементом. В гладком отверстии втулки помещена с возможностью вращения головка регулировочного винта, расположенного параллельно запрессованному во втулку щтифту, а на винте укреплен с возможностью возвратно-поступательного движения движок с пазом, взаимодействующим со штифтом, и с плоской пружиной, взаимодействующей с поводком поворотного валика привода. На чертеже изображена конструктивная схема узла привода и регулировки электрической нейтр.али датчика (обратной связи), например, для рулевого агрегата электрогидравлического привода. Узел привода и регулировки электрической нейтрали датчика содержит датчик 1 (обратной связи), жестко укрепленный в корпусе 2, например, рулевого агрегата. На подвижном; элементе штока 3 установлена втулка 4 с пазом 5, сопряженным с направляющим элементом (осью) 6. В гладком отверстии 7 втулки 4 помещен расположенный параллельно запрессованному во втулку 4 щтифту 8 регулировочный винт 9, на котором с возможностью возвратно-поступательного перемещения помещен движок 10, пазом 11 опирающийся на штифт 8. Движок 10 имеет выступ с плоской поверхностью 12, взаимодействующей с поводком 13, укрепленным на поворотном валике 14 датчика 1 и прижимаемым к поверхности 12 плоской пружиной 15, укрепленной на поводке. На корпусе датчика 1 нанесена контрольная риска 16, а на торце валика 14 - контрольная риска 17. -- г г Устройство работает следующим образом.«V Датчик 1 жестко закреплен в корпусе 2 агрегата. На. валике 14 ротора датчика 1 устанавливают поводок 13 образом, чтобы при нейтральном .положении поводка 13 обеспечить совпадение контрольных рисок 17 и 16. Это соответствует грубой настройке электрической нейтрали датчика, после чего поводок 13 с помошью плоской пружины 15 прижимается к плоской поверхности 12 движка 10. Точная регулировка электрической нейтрали датчика I проводится при нейтральном положении поршня 3 поворотом регулировочного винта 9. При этом движок 10, опирающийся на щтифт 8, перемещается в ту или иную сторону, а поводок 13 отслеживает его перемещение и поворачивает валик 14 ротора датчика 1. При мелком щаге регулировочного винта 9 (например, резьба с щагом 0,5) легко достигается высокая точность регулировки электрической нейтрали датчика I (10-15 мВ). После этого производится контровка регулировочного винта (любым известным способом). При работе агрегата поводок 13, взаимодействуя с движком 10, связанным через втулку 4 с порщнем 3, постоянно отслеживает положение поршня 3, поворачивая ротор датчика 1 на соответствующий угол. При этом, паз 5 втулки 4 скользит по направляющей оси 6, а плоская пружина 15 обеспечивает безлюфтовое соединение (взаимодействие) поводка 13 с движком 10. Для точной регулировки электрической нейтрали датчика I требуется подход только к регулировочному винту 9, что позволяет уменьшить габариты, а следовательно, и вес агрегата, и облегчает регулировку, особенно в многоканальных приводах, составленных из агрегатов в модульном исполнении. Кроме того, в устройстве регулировка заданного смещения электрической нейтрали датчиков обратной связи, необходимого в некоторых схемах многоканальных приводов, обеспечена без изменения конструкции и размеров регулировочных деталей, В предложенном устройстве корпус датчика может быть жестко укреплен в корпусе агрегата, что обеспечивает неподвижность подводящих проводов. Кроме того, точная регулировка электрической нейтрали может быть осуществлена вращением регулировочного винта, что позволяет упростить регулировку и повысить ее точность, а также увеличить надежность устройства и снизить вес агрегата, Формула изобретения Узел регулировки электрической нейтраи датчика обратной связи привода, соержащий установленный в корпусе датчик с поворотным валиком и поводком, кинематически связанным с поршнем гидроцилиндра привода, отличающийся тем, что, с целью повышения точности и упрощения регулировки, повышения надежности и снижения веса устройства, на штоке закреплена втулка с пазом, сопряженным с установленным на корпусе направляюшим элементом, причем в гладком отверстии втулки помещена с возможностью враш.ения головка регулировочного бинта, расположенного параллельно запрессованному во втулку штифту, а на винте укреплен с возможностью возвратно-поступательного движения движок с пазом, взаимодействующим со штифтом,и с плоской пружиной,взаимодействующей с поводком поворотного валика датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель с устройством защиты от перегрузок | 1980 |
|
SU904109A1 |
| ПИШУЩАЯ МАШИНА | 1930 |
|
SU24411A1 |
| Автоматический комбинированный штамп для поточного изготовления платяных кнопок | 1947 |
|
SU81977A1 |
| Пишущая машина | 1934 |
|
SU43012A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Датчик перемещений | 1979 |
|
SU938012A1 |
| АВТОМАТИЧЕСКАЯ ПУШКА | 2014 |
|
RU2553502C1 |
| Устройство для притирки клапанов | 1979 |
|
SU831564A1 |
| МЕХАНИЗМ КАЛЕНДАРЯ К НАСТОЛЬНЫМ И НАСТЕННЫМ ЧАСАМ | 1972 |
|
SU332415A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1997 |
|
RU2117900C1 |
/ Xf /
