Изобретение относится к автомати ке и может быть использовано в пози ционных системах управления, предна ;значенных для транспортировки объек та управления по заданному адресу. Известно устройство для программного управления перемещения объектов, содержащее привод подачи, соединенный с исполнительным механизмом и с блоком программы, который через переключатель режимов подключен ко входу усилителя воспроизведения, формирователь импульсов, вход которого подключен ко второму переключателю режимов и усилитель записи вход которого подключен к- выходу формирователя импульсов, а выход, к первому переключателю режимов 1 Недостатком данного устройства является низкая точность работы при перемещении объектов из одного положения в другое. Наиболее близким.по технической сущности к предлагаемому является устройство для программного перемещения, содержащее последовательно соединенные генератор импульсов, первый элемент ИЛИ, первый реверсивный счетчик, первый триггер и блок управления, выход которого соединен с вторым входом первого триггера и первым входом второго триггера, выходы которого подключены к одним входам блока управления, другие входы которого соединены соответственно с вторым выходом генератора импульсов и первым выходом второго реверсивного счетчика, первый вход которого через второй элемент ИЛИ соединен с выходом датчика обратной связи, второй вход - с первым выходом блока задания программы, второй выход которого через первый реверсивный счетчик связан с входом блока индикации 2 ... Недостатком данного устройства является невозможность формирования адреса нового положения объекта, что снижает точность работы устройства. Цель изобретения - повышение точности работы устройства. Эта цель достигается тем, что устройство содержит элементы И, причем выход первого элемента И через второй триггер подключен к первым входам второго и третьего элемента И, а входы первого элемента подключены соответственно к второму выходу второго реверсивного счетчика и к второму входу первого триггера, второму входу второго элемента И и первому входу четвертого.элемента И, второй вход которого соединен с первым выходом генератора импульсов и через второй элемент И с вторым входом второго элемента ИЛИ, выход - с третьим входом второго реверсивного счетчика, а третий вход - с вторым выходом второго триггера и первым входом пятого элемента И, выход которого подключен к второму входу первого- элемента ИЛИ, а второй вход к выходу датчика обратной связи и через третий элемент И - к второму входу первого реверсивного счетчика.
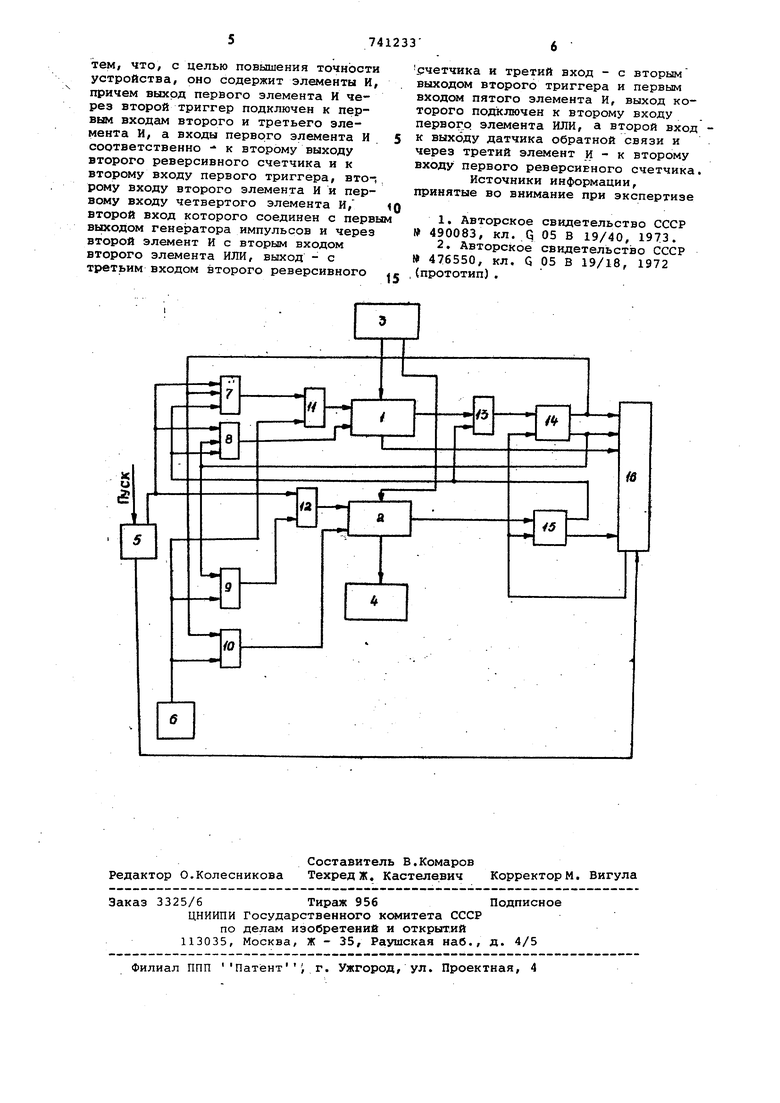
На чертеже изображена блок-схема устройства.
Схема устройства содержит реверсивные счетчики 1 и 2, блок 3 задания программы, блок 4 индикации, генроатоо 5 ИМПУЛЬСОВ, датчик б обратной связи,элементы 7,8,9 и 10 И элементы 11 и.12 ИЛИ, элемент 13 И, триггеры 14 и 15 и блок 16 управления.
Устройство работает следующим образом,
В реверсивный счетчик 2 с блока 3 задания программы вводится адрес фактического положения объекта, после чего в реверсивный счетчик 1 вводитс адрес требуемого положения объекта и запускается генератор 5 импульсов, который через элемент 12 ИЛИ подает . импульсы на суммирующий вход реверсивного счетчика 2 через открытый сигналами выходов триггеров 14, 15 элемент 7 И и через йлемент 11 ИЛИ на суммирующий вход реверсивного счетчика 1. Импульсы с генератора 5 импульсов подаются на суммирующие входы обоих реверсивных счетчиков 1, 2, первым заполнится счетчик, хранивший больший адрес, например, реверсивный счетчик 2, при этом срабатывает триггер 15, который первым выходным сигналом закроет элементы 7, 13 И и вторым выходным сигналом подает команду на блок 16 управления, который подключит исполнител ный механизм в направление перемещения объекта, определяемом сигналом первого выхода триггера 14.
При заполнении реверсивного счетчику 2 прекращается подача импульсов с генератора 5 импульсов на реверсивный счетчик 1, дополнение которого является разностью адресов.
При перемещении объекта импульсы, вырабатываемые Датчиком б обратной связи, подаются через открытый сигнал с выхода триггера 14, элемент , 10 И на вычитающий вход реверсивного рчетчйка 2 и . через элемент 11 ИЛИ на суммирующий вход реверсивного счетчика 1, сигналы с выхода котррого подаются на блок 16 управле- ния, скорость перемещения объекта зависит от величины дополнения, содержимого реверсивного счетчика 1, при подходе к требуемому положению включается пониженная скорость для точного останова объекта. При заполнении реверсивного счетчика 1, т. е. прибытию объекта на требуемую позицию, блок 16 управления остановит исполнительный орган и выдает импульс на закрытие триггеров 14 и 15.
Если реверсивный счетчик 1 хранит большой адрес, то он первым заполнится импульсами с генератора 5 импульсов через элемент 7 И и элемент ИЛИ, подаваемыми на его суммирующий вход, через открытый элемент 13 И , сработает триггер 14, который своим первым выходным сигналом закроет элементы 7, 10 И, а сигналом с второго выхода откроет элементы 8 и 9, после чего импульсы счета с генератора 5 импульсов подаются на вычитающий вход реверсивного счетчика 1 до заполнения реверсивного счетчика 2 и срабатывания триггера 15, который сигналом с .первого выхода закрывает элемент 8 И.
При этом дополнение счетчика 1 является разностью адресов, которая отрабатывается аналогично, т. е. им.пульсы с датчика 6 обратной связи через элемент 10 И подаются на вычитающий вход реверсивного счетчика -2. и через элемент 11 ИЛИ на суммирующий вход реверсивного счетчика 1 до его заполнения
Использование предложенного устройства позволяет за счет со1 ращения количественного состава оборудования достигнуть тех же качественных показателей, что и в известном устройстве.
Формула изобретения
Устройство -для программного управления перемещениемобъ екта, содержащее последовательно соединенные генератор импульсов, первый элемент ИЛИ, первый реверсивный счетчик, первый триггер и блЪк управления,выход которого соединен с вторым-входом первого триггера и первым входом второго триггера, выходы которого подключены к одним входам блока управления, другие входы которого соединены соответственно с вторым выходом генератора импульсов и первым выходом второго реверсивного счетчика, первый вход которого через второй элемент ИЛИ соединен с вьиходом датчика обратной связи, второй вход - с первым выходом блока задания программы, второй выход которого через первый реверсив|Ный счетчик связан с входом блока индикации, отличающееся
тем, что, с целью повышения точности устройства, оно содержит элементы И, причем выход первого элемента И через второй триггер подключен к первым входам второго и третьего элемента И, а входы первого элемента И соответственно к второму выходу второго реверсивного счетчика и к второму входу первого триггера, вто-; рому входу второго элемента И и первому входу четвертого элемента И, второй вход которого соединен с первы выходом генератора импульсов и через второй элемент И с вторым входом второго элемента ИЛИ, выход - с третьим входом второго реверсивного
рчетчика и третий вход - с вторым выходсм второго триггера и первым входом пятого элемента И, выход которого подключен к второму входу первого элемента ИЛИ, а второй вход к выходу датчика обратной связи и через третий элемент и - к второму входу первого реверсивного счетчика
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 490083, кл. Q 05 В 19/40, 1973.
2,Авторское свидетельство СССР 476550, кл. G 05 В 19/18, 1972
, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU640926A1 |
| Устройство для программного регулирования | 1981 |
|
SU1016772A1 |
| Устройство для программного управления | 1991 |
|
SU1807448A1 |
| Устройство для управления перемещением портала | 1985 |
|
SU1257615A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для отображения информации | 1982 |
|
SU1123048A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1136123A1 |
| Устройство для программного управления | 1986 |
|
SU1345169A2 |
