Изобретение относится к вьтисли- тельной технике и может быть исполь зоваио в автоматизированных системах управления контейнерными пунктами, роботами и ман:ипуляторами, а также
;на автоматических складах и гибких технологических производствах.
Цель изобретения - повышение производительности и распшрение области применения за счет задания времени нахождения объекта на каждой адресной, позиции.
На фиг 1 и 2 приведена схема устройства о .
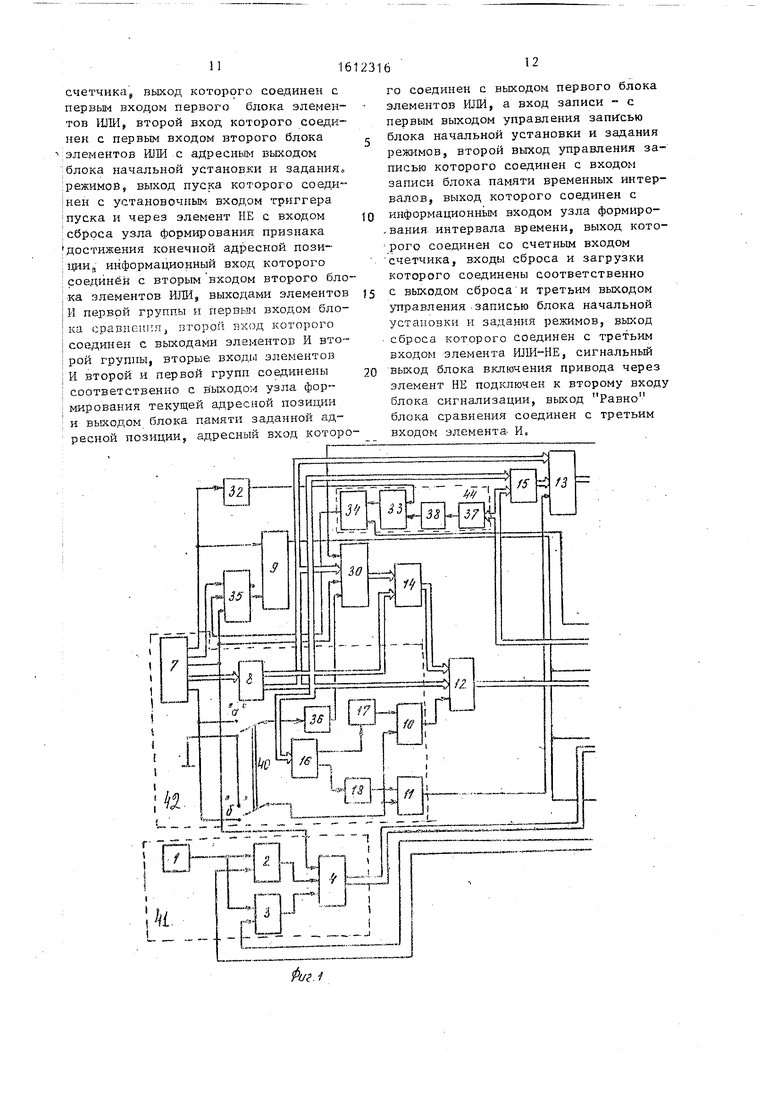
Устройство содержит датчик 1 обратной связи, два элемента И 2 и 3, реверсивный счетчик 4, блок 5 сравнения, блок 6 включения привода, блок 7 задания адресной позиции, 1Ш1фратор 8, триггер 9 пуска, элементы И-НЕ 10 и 11, блок .12 памяти заданной адресной позиции, блок 13 памяти временных интервалов, два блока 14 и 15 элементов lOTi, дешифратор 16 адреса,
05
тА Ю
С/:)
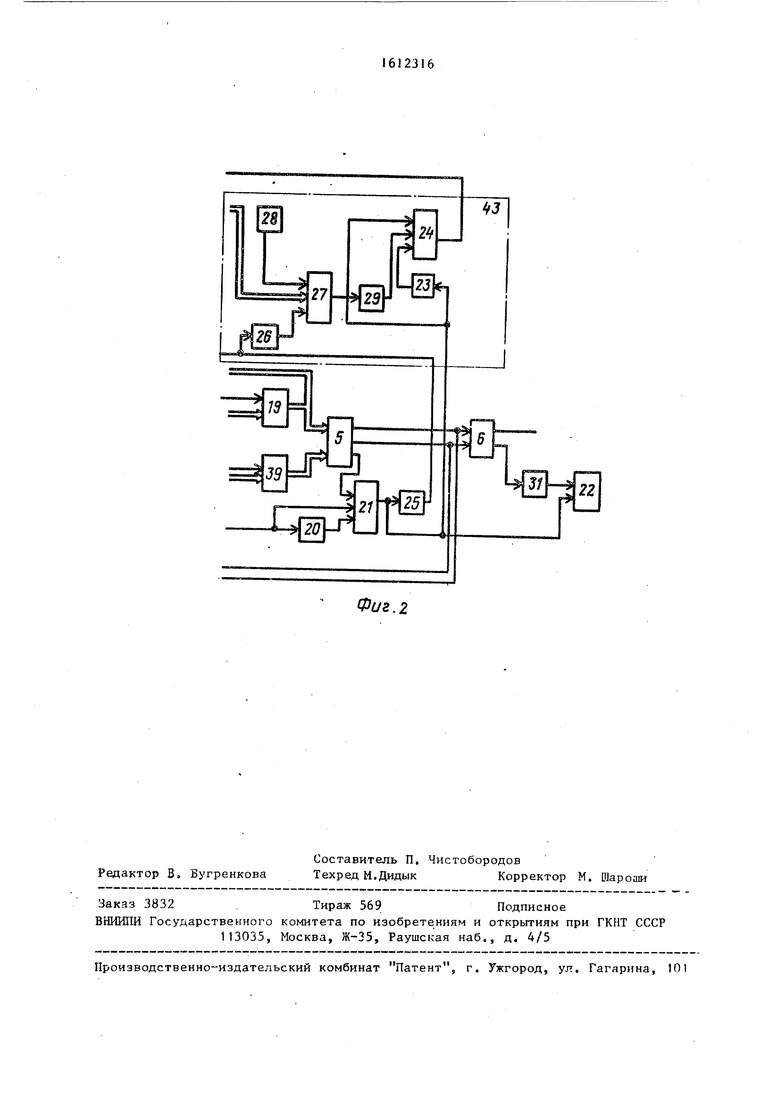
элемен гы НЕ 17 и 18, группа элементов И 19э элемент 20 задержки, элемент И 21, блок 22 сигнализации, элемент 23 задержки, элемент И 24, формирователь 25 импульсов, элемент НЕ 26, реверсивньш счетчик 27, генератор 28 импульсов, элемент НЕ 29,, счетчик 30, элементы НЕ 31 и- 32, триггер 33J элемент И 34, элемент ИЛИ-НЕ 35J элемент НЕ 36, элемент )Ш-НЕ 37, формирователь 38 импульсов, группу элементов И 39, переключатель 40 с положениями а и S . Элементы устройства с позициями 1-4 обт едипены в узел 4,1 формирования текуш,ей адресной позиции Элементы; устройства с позициями 7, 8, 10, Г1 , 16, 17, 18J 36 и 40 объединены в блок 42 начальной установки и задания ре;кимов Элементы устройства с позициями 23J 245 26, 27, 28 и 29 объединены в узел 43 формирования интервалов времени. Элеме ты устройства с позициями 33, 34J 37 и 38 объединены в узел 44 формирования нризнака достижения конечной адресной ПОЗИ1ЩИ
Датчик обратной связи представля- ет собой типовой индукционный датчик и предназначен для формирования отдельных импульсов при нрохожд,ении, движущимся объектом ,ой адресной пози1щи„ Блок 5 сравнения предназначен для сравнения двух двоичных чисел. Блок 6 включения привода исполнительного механизма содержит узлы управления двигателями, схемное исполнение которых зависит от типа конкретного движущегося объекта, Блок 7 задания адресной позиции представляет собой стандартную цифровую клавиатуру, имеющую информационную и адресную части, кнопку 11уск % Запись % Сброс и Стоп (не показано), которьм соответствуют выходы блока 7,
Клавиатура предназначена для па- бора послед,овательности номеров адресных позиций,
Шфратор 8 предназначен для преобраз.ования кода, г:оступающего на его вход с выхода блока 7 задания .-адресной позиции, в ДВОИЧНЬЕЙ код. Блок 12 памяти предназначен для запоминания и хранения последовательности номеров адресшпс позиций илок .13 памяти временных интервалов предназначен для запомишлшя и хранения
. кодов N , пропорциональных времени нахождения объекта на соответствующих нозициях, которые могут быть определе- иы из вьфажения
N} Т./Т,,,
где Т - время нахождения объекта
на 1-й позиции;
Tf-(,, - период следования импульсов
генератора 28 импульсов} N код, определяющий время нахождения объекта на заданной позиции.
5 Дешифратор 16 адреса предназначен для выбора одного из блоков 12 или 13 памяти при записи в него информации Реверсивный 27 счетчик служит для задания времени нахождения объекта 0 на i-й позиции Tj, определяемое из выражения
тр
Блок 22 сигнализации содержит стан- 5 дартные световые и звуковые сигнализаторы и предназначен для выдачи световых и звуковых сигналов оператору. Элементы устройства могут быть выполнены на следующих микросхемах пер- 0 вый 4 и второй 27 реверсивные счетчики и счетчики 30 - К555ИЕ7; блок сравнения 5 - К555СП1; блок памяти 12 и блок 13 памяти временных интервалов К1 55РУ5, триггеры 9 и 33 - К155та2, 5 дешифратор 16 - К155ИДЗ D- и S-входы:- - триггеров 9 и 33 через резистор 1 кОм подключены к источнику напряжения +5 В, а их синхровходы являются ус- становочными (в 1) входами. 0 Форжфователи 25 и 38 импульсов могут быть выполнены, например, на базе дифференцирующей цепочки или одновибратора К155АГЗ, I
дс: Устройство работает следующим образом.
Перед началом работы устройства триггер 9s первый 4 реверсивный счетчик и счетчик 30 устанавливаются в нулевое состояние по нажатию оператором клавиши Сброс на блоке 7 задания адресной позиции, а движущийся объект находится на исходной позиции, имеющей нулевой номер адресной позиции. При замыкании ключа К оператор с помощью блока 7 задания адресной позиции набирает после- довате1тьность номер.ов адресных позиций, у которых должен останавливать5 1
ся движупщйся объект и срответствую- щие им числа N определяющие время нахождения объекта на i-й позиции, для выполнения транспортных операций (на адресной части клавиатуры набирается номер ячейки блока 12 памяти или блока 13 памяти временных интервалов, а. на информационной част и соответственно номер .очередной адр.есной позиции или число NJ, , после чего производится их запись в соответствующие блоки 12 или 13 памяти по нажатию оператором на клавиатуре клавиши Запись „ В шифраторе 8 последним набирается номер нулевой адресной позиции. Набираемые поочередно в блоке 7 задания адресной позиции адреса и номера позиций или адреса и числа преобразуются в двоичный код. На вход дешифратора 16 адреса с выхода шифратора 8 подается старшая часть адреса При адресовании к блоку 12 памяти старшая часть адреса выбирается минимальной, а при адресовании к блоку памяти временных интервалов 13 - максимальной. В первом случае код старшей части адреса 0 .. .фФ а во втором - 1 ,. .11 .
Код младшей части адреса, по которому записывается число N в блок 13 памяти временных интервалов, равен номеру i-й адресной позиции,
При адресовании к блокам 12 или 13 памяти сигнал нулевого потенциала формируется соответственно на первом или втором выходах дешифратора 16 адреса. Этот сигнал соотретственно через элементы НЕ 17 или 18 поступае на первые входы элементов И-НЕ 10 или 11, на вторые входы которых поступает единичный сигнал с выхода блока 7 зада1 ия адресной позиции Запись при нажатии оператором одноименной клавиши. На выходах .элементов И-НЕ 10 или 11 формируется нулевой сигнал3 поступающий соответственно на вход Запись блока 12 памяти или блока 13 памяти временных интервалов, записывая в них соответственно номера адресных позиций или коды Nt,
Последним набирается номер нулевой адресной позиции. После этого оператор набирает нулевой адрес на адресной части клавиатуры и нажимает клавишу Пуск на блоке 7 задания адресной позиции (при этом оба
6
блока 12 и 13 памяти переводятся в реяош чтения, так как на их входы Запись постоянно поступает сигнал
единичного потенциала), Но сигналу с выхода блока 7 Пуск, поступающему на установочный вход триггера 9, на его прямом выходе появляется сигнал единичного уровня. Это сигнал
поступает на разрешающие входы группы элементов И 39 и группы элементов И 19, разрешая прохождение через элемент И 19 номера первой адресной позиции, записанной в блоке 12 памяти
по нулевому адресу на первый информационный вход блока 5 сравнения, а на его второй информационный вход через группу элементов И 39 кода проГзденной адресной позиции с выхода первого реверсивного счетчика 4, Единичный уровень с выхода триггера 9 через элемент 20 задержки (задержка ос тцествляотся на время сравнения первого номера алресной позиции с содержимым первого
реверсивного счетчика ч в блоке 5 сравнения поступает на второй вход элемента И 21, разрешая прохождение через негр сигнала единичного уровня с выхода блока 5 сравнения Равенстно. I
В блоке 5 сравнения происходит сравнение номера первой адресной позиции с содержимым нервотчт реверсивного счетчика 4. Поскольку движущийся объект находится на исходно позиции и в нервом реверсивном счетчике 4 записан нуль, а в нуленой ячейке блока 12 памяти записано чиело большее нуля, то в резул1 тате
сравнения появляется сигнал единичного уровня на выходе Больше блока 5 сравнения (на его других выходах присутствуют сигналы нулевых уровней) . :3тот единичньш сигнал поступает lia вход, блока 6 включения привода исполнительного механизма Вперед, Объект при этом начинает двигаться в направлении возрастания
номера адресной позиции. Одновременно этот же сигнал поступает на, второй вход элемента .И 2, ня первьй вход которого поступают импульсы с выхода датчика 1 обратной связи
(импульс на выходе датчика 1 обратной связи формируется при прохождении объектом каждой адресной позиции) . Эти импульсы проходят на суммирующий вход первого реверсивного
.счетчика 4, увеличивая его содержи- , мое о
Поскольку в начале движения объ- акта в первом реверсивном счетчике 4 записан нуль, то при перемещении объекта число в первом реверсивном счетчике 4 равно количеству пройденных позиций,
Когда движущийся объект окажет- ся у заданной адресной позиции, число в первом реверсивном счетчике 4 станет равным номеру в нулевой ячейке блока 12 памяти, и на выходе Дольше блока 5 сравнения появится сигнал нулевого уровня, а на его выходе Равенство - сигнал единичного уровня о Этот единичный уровень через открытый элемент И 21 поступает на первьш вход блока 22 сигнализации (оператору вьща .ггся сигнал о прибытии объекта на заданную позицию, и через второй элемент 23 за держки (задержка осуществляется на время записи кода N,| во второй реверсивный счетчик 27-на второй вход элемента И 24 (как сигнал разрешения прохождения через элемент И 24 сигнала с выхода Заема второго реверсивного счетчика 27) и на вход формирователя, 25 имПульСов На выходе формирователя 25 импульсов формируется единичный импульс по переднему фронту входного сигнала. Этот импульс через элемент НЕ 26 поступает на вход разрешения записи второго реверсивного счетчика 27, записывая в него код N с выхода блока 13 памяти временных интервалов, на адресный вход которого через второй элемент ИЛИ 15 поступает код номера первой адресной по- зииди с выхода блока 12 памяти.
На адресньй вход блока 12 памяти поступает нулевой адрес с выхода счетчика 30 (с выхода шифратора 8 поступает код нуля). На вычитающий вход второго реверсивного 27 счетчи- ка поступают импульсы с выхода генератора 28 импульсов до его обнуления и формирования нулевого сигнала на его выходе Заема,,
Это обеспечивает нахождение объекта на первой адресной позиции в течение времени 1, T.ryi N | и выполнение необходимых опера11 5й „ Нулевой сигнал с выхода Заека второго
реверсивного счетчика 27 через элемент НЕ 29 и открытый элемент И 24 поступает на счетный, вход счетчика 30, увеличивая его содержимое на +1, На адресньй вход блока 12 памяти через блок элементов ИЛИ 14 с выхода счетчика 30 поступает ад- рее следующего номера адресной позиции, код которой с выхода блока 12 памяти поступает через группу элементов И 19 на первый информационный вход блока 5 сравнения, а через группу элементов И 19 и
блок элементов ИЛИ 15 - на адресный вход блока 13 памяти временных интервалов. Если число в первом реверсивном счетчике 4 больше числа, хранящегося в выбранной ячейке бло ка 12 памяти, то появляется сигнал единично о уровня на выходе Меньше блока 5 сравнения Этот сигнал поступает на вход Назад блока включения привода 6 исполнительного механизма и на второй вход элемента И Зо Объект начинает двигаться в направлении уменьшения номера адресной позиции о При этом на вьгаитаюпу1Й вход первого реверсивного счетчика
4 поступают импульсы, формирующиеся при прохождении объектом каждой адресной позиции, Содержимое первого реверсивного счетчика 4 постепенно уменьшается В момент прибытия объекта на заданную адресную позицию со- держимое в первом реверсивном счетчике 4 совпадает с числом в ячейке блока 12 памяти На выходе Меньше блока 5 сравнения появляется сигнал
нулевого уровня, а на его выходе
Равенство - сигнал единичного уров-- ня э что к остановке обьек- та записи во второй реверсивный счетчик 27 кода Nj, соответствующего
выбранной адресной позиции, задержке объекта на ней на время Т , T,-, N,| и увеличение, после задержки объекта, счетчика 30 на +1, После этого работа устройства происходит аналогично,
При считывании нулей (записанной последней) адресной позиции из блока 12 памяти на выходе элемента ИЛИ-НЕ . 37 формируется единичный логический уровень, ПО переднему фронту кото- , рого формируется единичный импульС на выходе формирователя 38 импульсов, которьш устанавливает в единичное состояние триггер 33, При достижении объектом нулевой адресной позиции на выходе формирователя 25 формируется единичный импульс, который через открытый сигналом с прямого выхода триггера 33 элемент И 34 и элемент ИЛИ-НЕ 35 поступает на вход сброса триггера 9, устанавливая его в нулевое состояние.
Нулевой сигнал с прямого выхода триггера 9 блокирует поступление кодов на входы блока 5 сравнения, а также прохождение сигналов через элементы И 24 и 21. Устройство го- тово к следующему циклу работы,
Если объект незапланированно остановился, не достигнув заданной адресной позиции, на сигнальном выходе блока 6 включения привода (исполни- тельного механизма единичный сигнал сменяется нулевым Это приводит к появлению на выходе элемента НЕ 31 сигнала единичного уровня, поступающего на второй вход блока 22 сигнализации, в результате чего вы- рабатьшается сигнал оператору, об аварийной остановке движущегося объек та
Если оператору необходимо изменит последоватальность вьтолнения опера ций, то он нажимает клавишу Стоп на блоке 7 задания адресной позиции, после чего замыкает ключ C . Набирает на блоке 7 (на информационной части клавиатуры) адрес, по которому записан в блоке 12 памяти номер адреной позиции, возле которой должен остановиться движущийся объект, и нажимает клавишу Запись. По сигналу с выхода Запись блока 7, адрес но- мера адресной позиции записывается в счетчик 30. По нажатию клавиши Пуск на блоке 7 задания адресной позиции работы устройства .происходит аналогично первому случаю. .
Кроме того, используя клавиши Пуск и Стоп на блоке 7 задания адресной позиции, оператор .может управлять движущимся объектом в ручном режиме. Каждый раз при достижении объектом нужной адресной позиции оператор нажимает клавишу Стоп записывает в счетчик 30 следующий адрес номера адресной позиции и посл вьтолнения необходимых операций нажимает клавишу Пуск, Работа устройства при этом происходит аналогично описанному ранее.
Формула изобретения
Устройство для автоматического адресования движущихся объектов, содержащее блок начальной установки и задания режимов, узел формирования текущей адресной позиции, две группы элементов И, триггер пуска, блок памяти заданной адресной позиции, блок сравнения, выходы Воль- ше и Меньше которого соединены с входами Вперед и Назад блока включения привода и одноименными входами блока формирования текущей адресной, позиции, вход начальной установки которого соединен с выходом сброса блока начальной установки и задания режимов, силовой выход блока включения привода является выходом устройства, отличающееся тем, что, с целью повышения производительности и расширения области применения за счет задания времени нахождения объекта на каждой адресной позиции, в него введены блок памяти временных интервалов, узел формирования интервалов времени, элемент И элемент задержки, два элемента НЕ, формирователь импульсов, .блок сигнали- за1тии, два блока элементов ИЛИ, узел формирования признака достижения конечной адресной позиции, счетчик и элемент ШБ1-НЕ, выход которого соединен с входом сброса триггера пуска, выход которого соединен с первыми вхдами элементов И первой и второй гру с первым входом .элемента И и через элемент задержки с вторым входом элемента И, выход которого соединен с первым входом блока сигнализации, входом запуска узла формирования интервалов времени и через формировател импульсов с входом сброса узла формирования интервалов времени и входом стробирования узла формирования признака достижения конечной адресной позиции, выход которого соединен с вторым входом элемента ИЛИ-НЕ, третий вход которого соединен с выходом Стоп блока начальной установки и задания режимов, информационный выход которого соединен с информационным входом блока памяти временных интервалов, информационным входом блока памяти заданной адресной позиции и входом параллельной записи
счетчика, выход которого соединен с nepEbH-i входом первого блока элементов ШШ, второй вход которого соединен с первым входом второго блока элементов ШШ с адресньм выходом блока начальной установки и задания режимов, выход пуска которого соединен с установочным входом триггера пуска и через элемент НЕ с входом сброса узла формирования признака достижения конечной адресной позиции,, информационный вход которого соединён с вторым входом второго блока элементов ИЛИ, выходами элементов И пер.врй группы и первьи входом блока сравненияJ пторой вход которого соединен с выходами элементов И второй группы, вторые входы элементов И второй и первой групп соединены соответственно с в ых.одои узла формирования текущей адресной позиции и выходом блока памяти заданной адресной позиции, адресный вход которо
Г
г-1 ,,1 г
HUJLib LT
i-.-JЁ-,301
го соединен с выходом первого блока элементов ИЛИ, а вход записи - с первым выходом управления запи:сью блока начальной установки и задания режимов, второй выход управления записью которого соединен с входом записи блока памяти временных интервалов, выход которого соединен с информационнь1м входом узла формиро- ,вания интервала времени, выход кото- рого соединен со счетньш входом - счетчика, входы сброса и загрузки которого соединены соответственно с выходом сброса и третьим выходом управления записью блока начальной установки и задания режимов, выход . сброса которого соединен с третьим входом элемента ШШ-НЕ, сигнальный выход блока включения привода через элемент НЕ подключен к второму входу блока сигнализации, выход Равно блока сравнения соединен с третьим входом элемента- И,



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования движущихся объектов | 1988 |
|
SU1580399A1 |
| Устройство для ввода информации | 1989 |
|
SU1661748A1 |
| Электромузыкальный инструмент | 1984 |
|
SU1270785A1 |
| Устройство для распознавания подвижных объектов | 1989 |
|
SU1649575A1 |
| Устройство для контроля информационной идентичности объектов управления | 1988 |
|
SU1589256A1 |
| Устройство для автоматического адресования движущихся объектов | 1984 |
|
SU1206812A1 |
| Устройство для оценки степени оптимальности размещения в многопроцессорных кубических циклических системах при направленной передаче информации | 2017 |
|
RU2727555C2 |
| Устройство для оценки степени оптимальности размещения в многопроцессорных гиперкубических циклических системах | 2019 |
|
RU2718166C1 |
| Устройство для программного управления с самоконтролем | 1983 |
|
SU1130832A1 |
| Устройство для автоматического адресования транспортных средств | 1986 |
|
SU1383401A1 |
Изобретение относится к вычислительной технике и может быть использовано в автоматизированных системах управления конвейерными пунктами, роботами и манипуляторами, а также на автоматических складах и гибких технологических производствах. Целью изобретения является повышение производительности и расширение области применения устройства. Устройство содержит блок начальной установки и задания режимов, узел формирования текущей адресной позиции, две группы элементов И, триггер пуска, блок памяти заданной позиции, блок сравнения, блок включения привода, блок памяти временных интервалов, узел формирования интервалов времени, элемент И, элемент задержки, два элемента НЕ, формирователь импульсов, блок сигнализации, два блока элементов ИЛИ, узел формирования признака достижения конечной адресной позиции, счетчик и элемент ИЛИ-НЕ. Цель достигается за счет возможности оперативного вмешательства оператора в процесс управления движущимся объектом и возможности задания времени нахождения объекта на каждой адресной позиции. 2 ил.
Фиг. 2
| Устройство для автоматического адресования движущихся объектов | 1984 |
|
SU1206812A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
