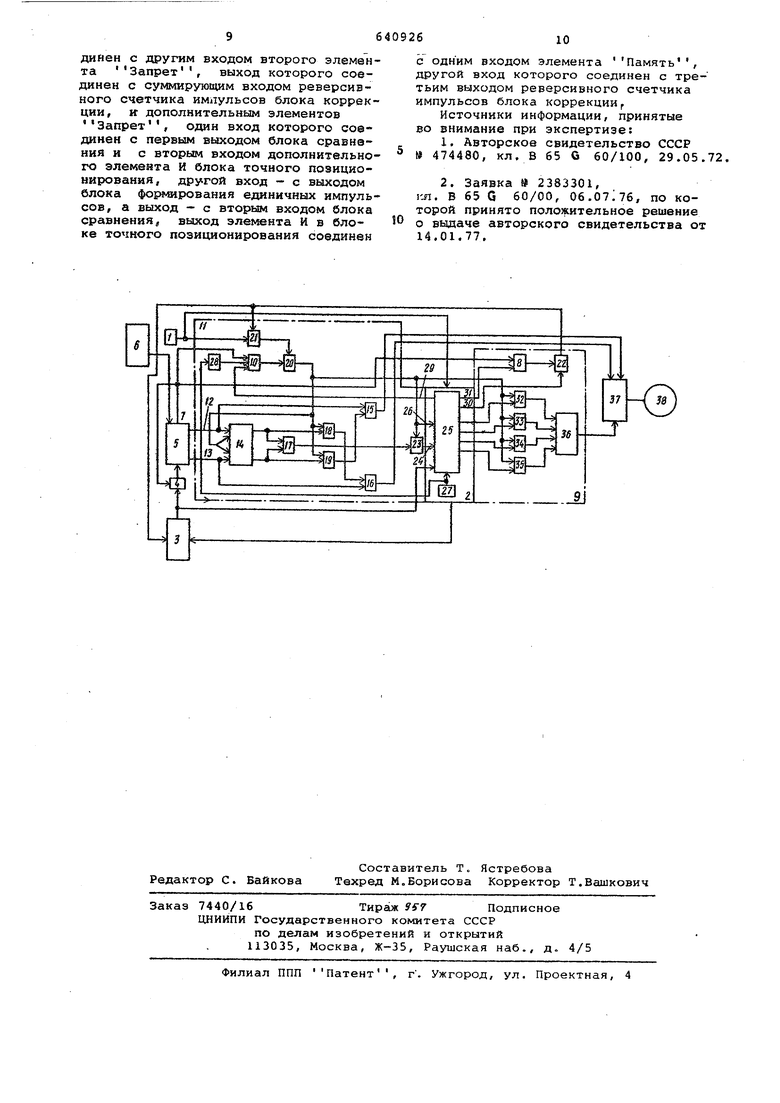
koTOppro соединен с одним-из выходов счетчика импульсов блока коррекции, блок формирования единичных импульсов один из входов которого соединен с первым выходом блока коррекции, а выход с нулевым входом счетчика импульсов блока коррекции 2. Недостатком известного устройства является большое время позиционирования, а также недостаточная точность останова подвижного объекта на адресной позицииf вызванная невозможноетью учета ..параметров тормозимого объекта н сложностью вычислительных операций. Цель изобретения - уменьшение времени позиционирования, Указанная цель достигается тем, что счетчик импульсов блока коррекции выполнен реверсивным и устройство снабжено блоком реверса, выполненным на элементах Запрет, Память, И, ИЛИ, схеме задержки времени, счетном триггере, причем один из входов первого элемента Запрат соединен с выходом элемента Память блока точного позиционирования и с первым входом блока формирования единичных импульсов, другой - с датчиком путевы импульсов, вход схемы задержки времен соединен с датчиком шаговых импульсов блока коррекции, а выход - с одним из входов первого элемента И, второй вход которого соединен с первым выхо дом блока сравнения, третий - с другим выходом реверсивного счетчика импульсов блока коррекции, а выход - с одним из входов элемента Память другой вход которого соединен с выходом элe ieнтa Запрет , а выход со счетным входом триггера, с первым входом.второго и третьего элементов И, с другими входами группы элементов И блока точного позиционирования, с вычитающим входом ревероив ного счетчика импульсов блока коррекции и с одним из входов второго элемента Запрет, другие входы триггера соединены со вторым и третьи ми выходами блока сравнения, а выходы триггера соединены со вторыми вхо дами второго и третьего элементов И и с входами первого элемента ИЛИ, выход второго и третьего элементов И соеди нены соответственно с одними из входо третьего и второго элементов ИЛИ, к pyrkM входам которых подсоединены выходы блока сравнения, а выходы соединены со вторым и третьим входами блока управления, выход первого элемента ИЛИ соединен с другим входом второго элемента Запрет, выход которого соединен с суммирующим входом реверсивного счетчика импульсов блока коррекции, и дополнительным элементом Запрет, один вход которого соединен с первым выходом блока сравнения и со вторым входом дополнительного элемента И блока точного позиционирования, другой вход - с выходом блока формирования единичных импульсов, а выход со вторым входом блока сравнения, выход элемента И в блоке точного позиционирования соединен с одним входом элемента Память, другой вход которого соединен с третьим входом реверсивного . счетчика импульсов блока коррекции. На чертеже приведена блок-схема устройства Датчик 1 путевых импульсов для фиксации позиций адресования связан через блок 2 коррекции, блок 3 формирования единичных импульсов и элемент 4 Запрет с блоком 5 сравне-НИН, к которому подключен блок 6 задания программы. Выход 7 совпадения блока 5 подключен к входу элемента 4-Запрет к одному из входов элемента 8 И блока 9 точного позиционирования и элемента 10 И блока 11 реверса. Выходы 12 и 13 направления движения блока 5 соединены соответственно с раздельными входами триггер 14 с двумя устойчивыми состояниями if с входами элементов 15 и 16 ИЛИ. Выходы триггера 14 подключены к входам элемента 17 ИЛИ и к одним из ВХОДОВ элементов 18 и 19 И, другие входы которых соединены с выходом элемента 20 Память. Выход элемента 18 И - ко второму входу элемента 16 ИЛИ, элемента 19 И - ко второму входу элемента 15 ИЛИ. Вход элемента ,20 Память подключен к выходу элемента 10 И, а нулевой вход (установки в нулевое состояние) - выходу Элемента 21 Запрет, вход которого соединен с датчиком 1, а вход элемента 21 Запрет - с выходом элемента 22 Память блока 9. Счетный вход триггера 14 соединен с выходом элемента 20 Память, а выход элемента 17 ИЛИ через элемент 23 Запрет - с шиной- 24 сложения реверсивного счетчика 25 блока 2. Вход элемента 23 Запрет соединен с шиной 26 вычитания ревесивного счетчика 25, которая подключена к выходу элемента 20 Память блока 11. Выход датчика 27 шаговых импульсов, подключенного к счетному входу счетчика 25, соединен через схему 28 задержки времени к другому входу элемента 10 и, третий вход которого связан с выходом 29 допуска точного останова счетчика 25. Выход 30 меньшего числа счетчика 25 соединен с нулевым входом элемента 22 Память, а выход 31 большего числа - другим входом элемента 8 И, Нулевой вход счетчика 25 подключен к выходу блока 3 формирования единичных импульсов, -который имеет связь с выходом элемента 22 Память блока 9. В группе элементов 32-35 И по числу разрядов счетчика 25 (показано только четыре разряда) блока 9 один вход каждого элемента подключен к выходу соответствующего разряда счетчика, а другой объединеиный вход соединен с выходом элемента 20 Память блока 11. Выходы элементов 32-35 И подключены к цифроаналоговому преобразователю 36, а выход элемента 8 И к элементу 22 Память, Выход цифроаналогового преобразователя 36 соединен с входом блока 37 управления электроприводом 38. Два других входа блока 37 управления подключены к выходам элементов 15 и 16 ИЛИ блока 11. Устройство работает следу1ъл}им образом. При вводе адреса в блок 6 задания программы блок 5 сравнения в зависимости от действительного положения подвижного объекта устанавливает направление перемещения и посылает соответствующий сигнал через элементы 15/16 ИЛИ в блок 37 управления электроприводом 38. СигНс-Л с выхода 12(13 блока 5 сравнения поступает также в триггер 14, который, находясь в одном из двух устойчивых состояний, запоминает направление перемещения. На одном из входов элементов 18/19 И и 17 ИЛИ появляется сигнал нулевого (единичного) состояния триггера 14, Выходной сигнал элемента ИЛИ через элемент 23 Запрет подается на шину 24 сложения. Реверсивный счетчик 25, работая в режиме сложения импульсов, генерируемых датчиком 27 при движении подвижного объекта в заданном направлении, на каждой очередной позиции адресования сигналом от блока 3 устанавливается в нулевое состояние. Единичные импульсы фиксации позиций адресования из блока 3 через элемент 4 Запрет поступают также в блок 5 сравнения, который фиксирует изменение истинного положения подвижного объекта. При совпадении заданног и текущего адресов сигнал на выходе 12/13 блока 5 исчезает и блок 37 управления переводит электропривод 38 в режим эффективного торможения для экстренного останова подвижного объек та; Полученный на выходе 7 блока 5 сигнал совпадения исключает дальнейшее прохождение единичных импульсов через элемент 4 Запрет и устанав ливается на одном из входов элементо 8, 10 И. При выбеге подвижного объекта в процессе торможения, начиная с момента фиксации заданной позиции адресования, реверсивный счетчик 25 в режиме сложения накапливает импульсы, генерируемые датчиком 27. С выходов разрядов счетчика 25 подаются сигналы кодов последовательных чисел на одни из входов элементов 32-35 И . При выходе подвижного объекта из установленных допусков точного останова с выхода 29 поступает сигнал на другой вход элемента 10 И . При длинах выбега подвижного объекта, превышающих -отрезок пути между двумя позициями адресования при непрерывном суммировании счетчиком 25 импульсов от датчика 27 с выхода 31 счетчика 25 подается сигнал на другой вход элемента 8 И, который обеспечивает появлен1 е сигнала на его выходе, устанайливающего элемент 22 Память в единичное состояние. Сигнал с выхода элемента 22 Память подается в элемент 21 Запрет, который исключает прохождение сигнала от датчика 1 на очередной позиции адресования для перевода элемента 20 Память в нулевое состояние, а также в блок 3, где используется для запрещения появления сигнала на выходе блока, устанавливающего счетчик 25 в нулевое состояние. При останове подвижного объекта датчик 27 прекращает генерировать сигналы, схема 28 задержки времени подает сигнал на третий вход элемента 10 И, а счетчик 25 сохраняет число накопленных шагов импульсов, фиксирующее фактическую длину выбега подвижного объекта в реальных условиях для заданной позиции адресования.. Установка времени может быть отрегулирована таким образом, что уже при малой частоте подачи сигналов датчиком 27 на выходе схемы 28 появится сигнал. Сигнал на выходе элемента 10 И устанавливает элемент 20 Память в единичное состояние, а его выходной сигнал подается на другие входы элементов 18/19, 32-35 И, в элемент 23 Запрет, на счетный вход триггера 14 и на шину 26 для перевода счетчика 25 в режим вычитания, . С выхода элемента 18/19 И при существующем сигнале триггера 14 через элемент 16/15 ИЛИ сигнал поступает в блок 37 управления, который реверсирует электропривод 38. При появлении сигналов кода числа, пропорционального длине выбега, на выходах элементов 32-35 и цифроаналоговый преобразователь 36 определяет скорость перемещения подвижного объекта и выдает ее ввиде аналогового сигнала. Приближение подвижного объекта к месту адресования в процессе точного позиционирования сопровождается вычитанием импульсов, подаваемых датчиком 27 в реверсивный счетчик 25, и, следовательно, уменьшением установленного в нем числа, сокращенного пропорционально длине выбега.
Появление сигнала на выходе 30 вызывает установку элемента 22 Память, в нулевое состояние и исчезновение сигнала. „ на его выходе. В результате чего возникают сигналы на выходах элементов 21 Запрет и блока 3 форьшрования единичных импульсов .
Изменяющийся сигнал цифроаналого вого преобразователя 36 позволяет осуществить нeoбxoди 4oe замедление для точного Останова.
Окончание процесса позиционирования фиксируется датчиком 1, который своим сигналом еозвра&(ает элемент 20 Память в нулевое состояние.
Высокая точность позиционирования подвижного объекта может быть достигнута с использованием нерегулируемого электропривода, В ,этом случав доводочная скорость для точного останова устанавливается сигналом элемента 20 Память, который подается непосредственно в блок управления электроприводом, снабженный переключателем скорости.
Исчезновение сигнала на выходе элемента 20 Память вызывает отключение электропривода 38, перевод счетчйка 25 в режим сложения и опрокидывание триггера 14 в другое устойчивое .состояние, которое изменяет, направление позиционирования.
Если ошибка при останове превысит допуск, выхоя 29 счетчйка 25, начавniei-o накапливать новую серию шаговых импульсов, вновь пошлет сигяал в элемент 10 И, который установит элемент 20 Память в единичное состояние и процесс позиционирования продолжится уже в обратном направлении г обеспечивая возвращение подвижного объекта в место адресования В некоторых случаях для ввода подвижного объекта в установленные допуски останова, поэицион{1рование может выполняться с многократным изменение направления, в результате, чего достгается последовательное сокращение длины выбега до необходимых пределов.
Самопроизвольное или принудительное смещение подвижного объекта относительно места адресования автоматчески возобновляет процесс позиционирования и подвижный объект: устанавливается в прежнее положение. Прн вводе нового адреса в блок б задани nporpaNttffiJ сигнал совпадения на выходе 7 блока 5 сравнения исчезает и подвижный объект вновь способен перемещаться в нужном направлении.
Формула изобретения
Устройство программного управлени подвижным объектом, содержащее датчик путевых импульсов, блок задания программы, соединенный с одним из входов блока сравнения, блок коррекции, включающий счетчик импульсов и связанный с ним датчик шаговых импульсов, и соединенный с датчиком путевых импульсор, блок точного позиционирования, включакнций в себя группу элементов И, одни из входов которых соединены с поразрядн«э1ми выходами счетчика импульсов блока кор Гекцин, цифроаналоговый преобразова
0 тель, входил которого соелшнвны с выходами группы элементов И, а выход - с одним из входов блока управления, элемент Память и дополнительный элемент И, один из входов которого
5 соединен с одним из выходов счетчи- ка импульсов блока коррекции, блок формирования единичных импульсов, один из входов которого соеда1нен с первым выходом блока коррекции, а выход - с нулевым входом счетчика импульсов блока коррекции, отличающееся тем, что, с целью уменьшения времени позиционирования, счетчик импульсов блока коррекции выполнен
д реверсивным и устройство снабжено блоком реверса, вьшолненньам на элементах Запрет, Память, И, ИЛИ, схеме задержки времени, счетном триггере, причем один из вхо.цов первого элемента Запрет соединен с
выходом элемента Память блока точного позиционирования и с первым входом блока формирования единичных импульсов, другой - с датчиком путевых импульсов, вход схемы задержки
5 времени соединен с датчиком шаговых импульсов блока коррекции, а выход - с одним из входов первого элемента И, второй вход которого соединен с первым выходом блока сравнения, третий - с другим выходом реверсивного счетчика импульсов блока коррекции, а выход - с одним из входов элемента Память, другой вход которого соединен с выходом элемента Запрет , а выход - со счетным входом; триггера, с первьвч входом второго и
5 третьего элементов И, с другими входами группы элементов И блока точного позиционирования, с вычитанндим входом реверсивного счетчика импульсов блока коррекции и с одним из 50 входов второго элемента Запрет, другие входа триггера соединены с вторым и третьим выходами блока сравнения, а выходы триггера соеда1нены с вторыми входами второго и третьего
55 элементов И и с входами первого элемента ИЛИ, выходы второго и третьего элементов И соединены соответственно с одними из входов третьего и второго элементов ИЛИ, к другим входам gQ .которых подсоединены выходы блока сравнения, а выходы соединены с вторым и третьим входами блока управления, выход первого элемента ИЛИ соедийен с другим входом второго элеменЗапрет
выход которого соета
динен с суммирующим входом реверсивного счетчика импульсов блока коррекции, и дополнительным элементов Запрет, один вход которого соединен с первым выходом блока сравнения и с вторым входом дополнительного элемента И блока точного позиционирования, другой вход - с выходом блока формирования единичных импульсов, а выход - с вторым входом блока сравнения; выход элемента И в блоке точного позиционирования соединен
с одним входом элемента Память, другой вход которого соединен с третьим выходом реверсивного счетчика импульсов блока коррекции
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР
474480, кл. В 65 G 60/100, 29.05.72,
2.Заявка 2383301,
IM. В 65 G 60/00, 06., по которой принято положительное решение о выдаче авторского свидетельства от 14.01.77.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство последовательного считывания информации и точного позиционирования | 1987 |
|
SU1475875A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| Устройство для программного управления | 1986 |
|
SU1345169A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ | 1973 |
|
SU368611A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для адресования транспортных средств | 1987 |
|
SU1418761A1 |
