(54) СТЕНД ДЛЯ ИСПЫТАНИЯ ТОРМОЗОВ ТРАНСПОРТНЫХ СРЕДСТВ
1
Изобретение относится к области испытаний тормозов транспортных средств.
Наиболее близким из известных технических решений является для 5 испытания тормозов транспортных средств, содержащий основание, на котором размещены беговые барабаны, по крайней мере, один из которых оснащен датчиком угловой скорости, и еле- днище гидроприводы для имитации верTHKanbHfcix нагрузок на колеса транспортного средства, состоящие из гидроцилиндров, связанных через электрогидравлические преобразователи, по 15 крайней мере, с одной системойуправления, подключенной к датчикам нагрузки и приводам беговых барабанов 1 .
Известный стенд не обеспечивает 20 достаточной точности испытаний.
Цель изобретения - повышение точности испытаний.
Указанная цель достигается тем, что система управления снабжена бло- 25 ком задания весовой нагрузки, вход которого подключен к датчику угловой скорости, и блоком сравнения заданного и фактического значений коэффициентов сцепления, входы кото- 30
рого соединены с выходом блока задания весовой нагрузки и датчиками нагрузки, а выходы - с электрогидравлическими преобразователями, при этом каждый датчик нагрузки установлен на штоке соответствующего упомянутого гидроцилиндра в месте его соединения с элементами транспортного средства.
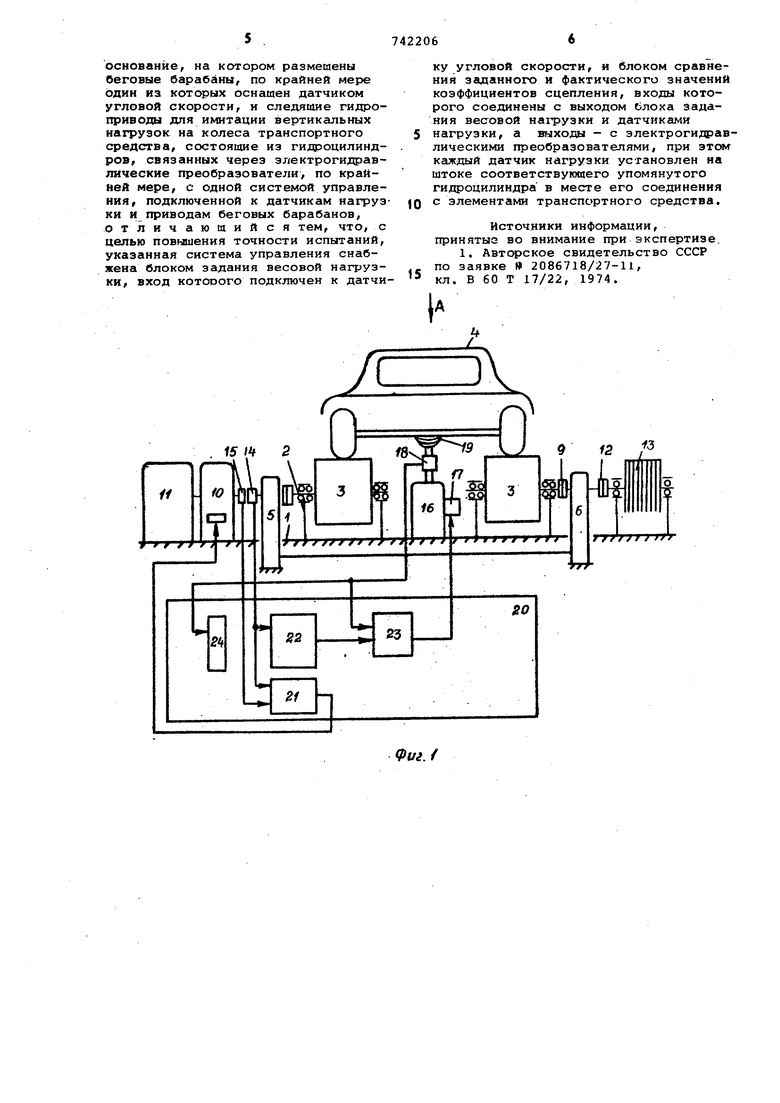
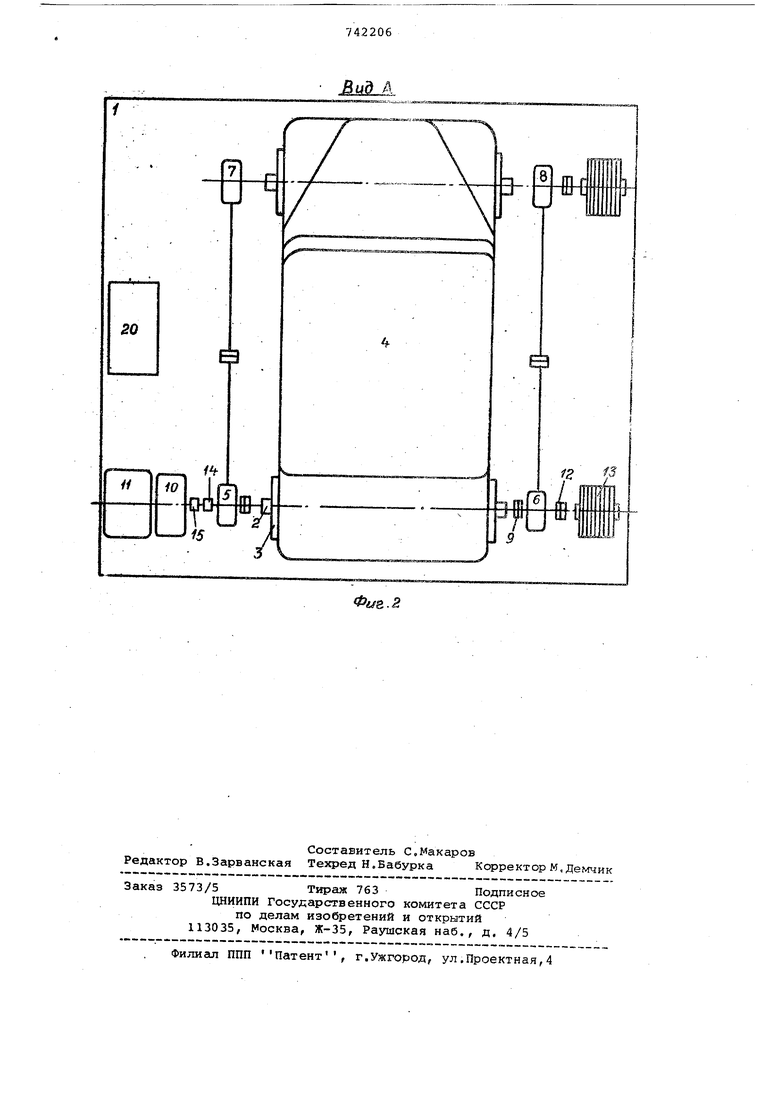
На фиг, 1 изображена схема ртенда для испытания тормозов транспортных средств; на фиг, 2 - вид А на фиг. 1.
На основании 1 смонтированы стойки 2 с беговыми барабанами 3, на которые установлено двухосное колесное транспортное средство 4. Беговые барабаны J связаны между собой посредством редукторов 5, 6, 7 и 8 и электромагнитных муфт 9, а также соединены через редуктор 5 и индукторный тормоз 10 с приводным асинхронным двигателем 11 и через редукторы 6 и 8 через электромагнитные муфты 12 - с наборными инерционными массами 13, На валу индукторного тормоза 10 размещены датчик 14 угловой скорости и датчик 15 момента.
На основании 1 закреплены гидроцилиндры 16, каждый из которых оснащен электрогйдравлическим преобразователем 17 и своим штоком через датчик 18 нагрузки и упругий элемент 19 соединен с соответствующим мостом транспортного средства 4. Система управления стендом размешена в пульте 20 управления и оснащена устройствами управления двигателём 11, муфтами 9 и 12 и устройствс 1 21 регулирования тормоза 10 с подключенным к устройству 21 датчиком 14 угловой скорости и датчиком 15, При этом система содержит блок 22 задания весовой нагрузки с подключенньм на входе датчиком 14, блок 23 сравнения заданного и фактического значений коэффициентов сцепления, KOTopfcrii подключен на входе к блоку 22 и к датчику Itt, а на выходе - к преобразователю .17, и устройств.о 24 индикации нагрузки с подключенным на входе датчиком 18. Блок 22 выполнен многоканальным по выходу с числом каналов, равным числу гидроцилиндров 16, устройство 24 выполнено многоканальным по входу с тем же числом каналов. На фиг. 1 показаны подключения одного канала, подключения другого канала аналогичны. При подготовке стенда к работе устройством 21 задается закон регулирования тормозного момента тормоза 10 в функции замедления беговых барабанов 3, имитирующий тормозной момент транспортного средства в условиях эксплуатации. В каждый кан блока 22 заводится задание до развесовке транспортного средства 4, т.е. задание по весовой нагрузке на кгикдую ось, а также заводится закон регулирования этих весовых нагрузок в функции замедления беговых бараба нов 3, имитирукший закон изменения весовой нагрузки транспортного средства 4 в условиях эксплуатации с учетом веса, длины базы, расстояния центра тяжести от одной из осей необходимой силы сцепления и других параметррв, влияющих на процесс торможения. Наборными инерционными массами 1 устанавливают приведенные моменты Ннерции- каждой оси транспорггного средства 4. Систему управления уста навливают в режим Наладка и вкл чают . гидроцилиндры 16. Задание по развесовке с блока 22 в форме электрического сигнала пост пает через блок 23 сравнения в элек рогидравлический преобразователь 17 который, регулируя давление жидкост поступающей в гидроцилиндр 16, заст ляет последний развивать определенное усилие прижима транспортного средства 4 к беговым барабангм 3. Это усилие воспринимается датчиком 18 Нагрузки и, преобразуясь в элект рический сигнал, в качестве сигнаша обратной связи поступает в блок 23 о тех пор, пока задание не будет отработано, в результате чего устанавливается необходимая статическая весовая нагрузка на каждую ось, а также и на беговые барабаны 3. Сигнал с датчика 18 одновременно поступает на вход устройства 24, для визуального КОНТРОЛЯ за заданием. После проведенной подготовки систему управления устанавливают в режим автоматической работы. Двигателем 11 рагоняют барабаны 3 вместе с массами 13 и колеса транспортного средства 4 до оборотов начала торможения. Затем отключают двигатель 11 и включают испытуе|иые тормоза транспортного средства 4. Сигнал от датчика 14 поступает в блок 22, где дифференцируется по времени, перемещаясь, тем самым в сигнал по замедлению. В процессе торможения имитируют перераспределение весовой нагрузки на оси. Для этого блок 22 в зависимости от полученного значения замедления обсчитывает параметры перераспределения веса и выдает результат в виде электрического сигнала по соответствующему каналу на блок 23, который через соответствуюащй электоогидравлический преобразователь 17 воздействует на гидроцилиндр 16, а последний нагружает или разгружает ось транспортного средства 4, в результате чего нагружаются или разгружаются беговые барабаны 3. Степень этих изменений отслеживается датчиками 18. Так как в процессе торможения величины нагрузок на барабаны 3 со стороны транспортного средства 4 все время изменяются по заложенному в блок 22 закону, то описанный процесс происходит непрерывно до окончания процесса TODNIO- жения. Одновременно действием тормоза 10 и инерционных масс 13 преодолевается тормозной момент испытуемого тормозного устройства транспортного устройства, при этом тормоз 10 управляется устройством 21 по заложенному в него закону регулирования тормозного момента тормоза 10 в функции замедления беговых барабанов 3. Замедление барабанов 3 получают путем дифференцирования сигнала датчика 14, поступающего в устройст-. во 21. Сигнал обратной связи по моменту торможения непрерывно поступает в устройство 21 от датчика 15. Упругий переходной элемент 19 демпфирует колебания штока гидроцилиндра 16 при регулировании усилия этого гидроцилиндра. Формула изобретения Стенд для испытания тормозов транспортных средств, содержащий.
основание, на котором размешены беговые барабаны, по крайней мере один из которых оснашен датчиком угловой скорости, и следящие гидроприводы для имитации вертикальных нагрузок на колеса транспортного средства, состоящие из гидроцилиндров, связанных через злектрогидравлические преобразователи, по крайней мере, с одной системой управления, подключенной к датчикам нагрузки и приводам беговых барабанов, отличающийся тем, что, с целью повышения точности испытаний, указанная система управления снабжена блоком задания весовой нагрузки, вход КОТОРОГО подключен к датчику угловой скорости, и блоком сравнения заданного и фактического значений козффициентов сцепления, входы которого соединены с выходом блоха задания весовой Hai-рузки и датчиками нагрузки, а выходы - с электрогидравлическими преобразователями, при этом каждый датчик нагрузки установлен на штоке соответствующего упомянутого гидроцилиндра в месте его соединения
0 с элементами транспортного средства.
Источники информации, принятые во внимание при экспертизе,
1. Авторское свидетельство СССР по заявке № 2086718/27-11,
5 кл. В 60 Т 17/22, 1974.
.ВидА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обкатки и испытаний колесных транспортных средств на инерционном стенде со сдвоенными опорными беговыми барабанами и инерционный стенд для его осуществления | 1988 |
|
SU1712809A1 |
| СПОСОБЫ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ (ВАРИАНТЫ), СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБОВ | 2005 |
|
RU2297932C1 |
| Стенд для исследования тормозных свойств прицепов, оборудованных инерционной тормозной системой | 1990 |
|
SU1783346A1 |
| Стенд для испытания транспортных средств | 1983 |
|
SU1132176A1 |
| Испытательный катковый стенд | 1990 |
|
SU1795335A1 |
| Способ установки колесного транспортного средства на испытательном стенде | 1983 |
|
SU1167084A1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| Тормозной инерционный стенд для испытания противоблокировочных систем | 1983 |
|
SU1113295A1 |
| Стенд для испытания тормозов транспортных средств | 1980 |
|
SU885862A1 |
| Участок контроля технического состояния транспортных средств | 1976 |
|
SU653530A1 |
Фив. 2
