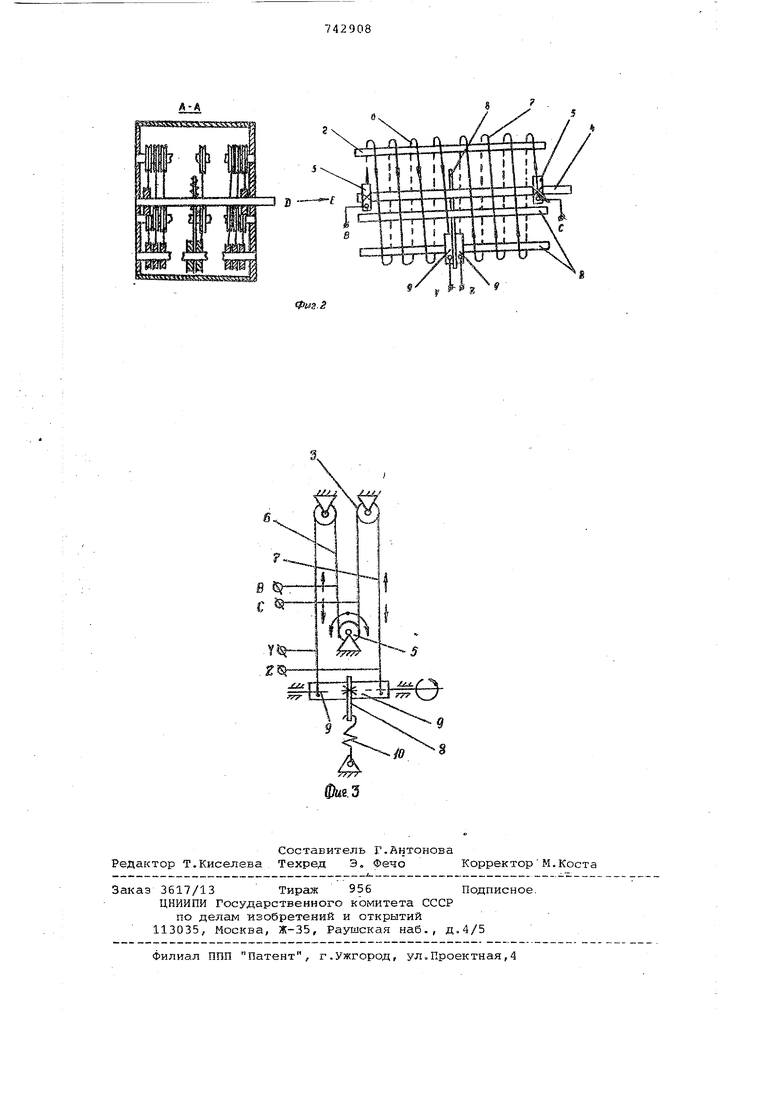
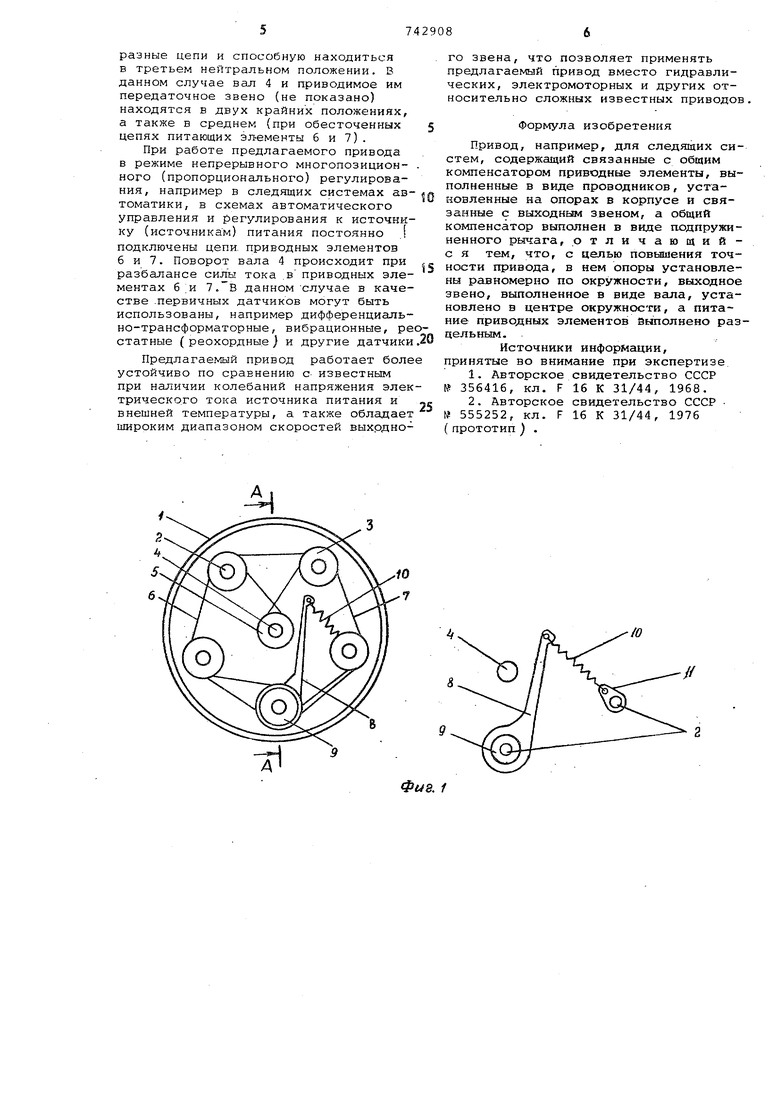
Изобретение относится к приводньм устройствам, в частности, элементов и узлов автоматики. Известен привод, в. котором в качестве приводного Элемента испольэу ется .нагреваемая электрическим током проволока, выполненный в виде треугольника, образованного основани ем, проволокой, намотанной на две катушки, одна из которых связана с основанием, и стержня шарнирно связанного одним кондом с основанием, а другим - со второй катушкой и представляющего собой выходное звено подпружи.ненное на основании Cl3. Недостатком такого привода является его узкое функциональное назначение, зависимость крутящего момента на выходном звене от колебаний внешней температуры и напряжения ритающай сети, что приводит к нестабильности работы выходного эвена. Наиболее близким по технической сущности к йзобретенйй явптаетсяйривод, например, для следящих систем, содержащий связанные с общим компенсатором приводные элементы в виде проводника, установленные на опорйх в корпусе и связанные с выходшлм звеном, а общий компенсатор выполнен в виде подпружиненного рычага/2 J. Недостатком этого привода является зависимость крутящего момента на выходном звене от колебаний внешней температуры и напряжения питающей сети, что приводит к нестабильности работы выходного звена. Цель изобретения - повышение точности. Эта цель достигается тем, что. в приводе, например, для следящих систем опоры установлены равномерно по окружности, ёыходное звено, выполненное в виде вала/ установлено в центре окружности, а питание приводных элементов выполнено раздельным. Предлагаемый привод с вращакнцим моментом на валу выходного эвена, дифференцированном по силе тока в проволочных приводных элементах, используется, например, для двухпозидионного и многопозиционного (пропорционального) автоматического управления и регулирования, преимущественно в качестве исполнительного механизма. .Предлагаемый привод имеет устройство, стабилизирующее вращающий MOMiEM;iT выходного звена и предохраня.ющее детали привода от механических перегрузок, повышая таким образом его надежность и долговечность по сраБнению с известным. На фиг.1 скематически изображен привод со снятой передтней крышкой корпуса; на фиг.2 - разрез А-А на фиг.:1 (вид слева); на фиг.З - упрощенная кинематическая скема пре.фтагаемого привода, Йривс д состоит из корпуса 3., в ко торбм смонтированы по углам правильНОГ9 многогранника, например пятигра ника, связанные с корпусом 1 вэа.имко опоры 2, на которых установлены пово ротйые ролики 3 из термостойкого эле троизоляционного материа,ла с вмоитиров&нными в них антифрикционны21 И вту к ами, акое конструктивное решение обес печивает более равномерное распределение нагрузки в приводных проволочных элементах, уменьшить габ.ариты привода, а также снизить потери на ме5кду опорами 2 и роликами 3, Вал 4, установленный в подшипникак корпуса 1 внутри пространства, ограниченного опорами 2, несущими на cesSe приводные проволочные элементы, яв1|яется приводным звеном предлагаеMoito привода. Один конец вала 4 выхоДит наружу из корпуса 1 (фиг.2) . На валу 4 смонтированы связанные с ним катушки 5 из электроизоляционного материала, на которых закреплены начала приводных элементов б и 7, представляющих собой проволоку, например, из спецстали, обладающую высоким пределом прочности при растяже нии, максимально возможным коэффициентом -линейного расширения и минимал ным остаточным удлинением в пределах допус н агру з ок . На одной из опор 2 шарнирно установлен рычаг S, связанный с двумя ка тушками 9 из электроизоляционного теплостойкого материала, на которых закреплены концы проволочяьзх приводных элементов б и 7, К сробОдному концу р)Ычага 8 прикреплена натяжная компенсационная пружина 10, связанная вторьгм концом с одной из опор 2, котостя способств ет стабилизации крутящего момента на выходном валу 4, предохраняет детали пред%1атаемого привода от механических перегрузок и автоматически коглпе .сирует прослабление приводных элемен тов б и 7, которое может возникнуть в процессе длительной эксплуатации. Приводные элементы б и 7 намотаны на ролики 3 в противоположных направ лениях вокруг многогранника, образо ; ванного опорами 2. Это позволяет ур новешивать вращающие моменты элемен ов б и 7 на валу 4 путем его повороа. Приводные элементы должны обладать динаковыми механическими, электричесими и размерньми данными. Подвод электроэнергии к приводным л;ементам б и 7 осуществляется через роходные изоляторы в корпусе (на иг. не показаны) с помощью четырех ибких проводников, два из которых и С подсоединяются к началам элеентов 6 и 7 на двух электрически азобщенн121х катушках 5, а два других и Z соответственно на двух элекрически разобщенных катушках 9. Предлагаемый привод действует следующим образом. В исходном состоянии, когда на приводные элементы б и 7 напряжение не подано или же сила тока в обоих элементах одинакова, выходное звено, например сектор реечного привода (на фиг. не показан) , закрепленное на валу 4 (фиг.1 и 2), находится в среднем положении. Как только сила тока в одном из элементов увеличится, .например в элементе б, произойдет его удлинение по сравнению с элементом 7. Во,зникшее вследствие электротеплового расширения прослабление приводного элемента б устраняется под воздействием пружины 10 компенсационного узла, которая поворачивает через посредство рычага 8 взаимосвязанные с ним катушки 9.. Вследствне этого концы проволочных приводных элементов б и 7 наматываются на катушки 3 до момента достижения равновесия сил, воздействующих на приводные элементы б и 7. При этом происходит поворот выходного Звена, в данном случае вала 4 против часовой стрелки. Такое же явление происходит,если сила тока в другом приводном элементе 7 уменьшится по сравнению с первым приводыьм элементом б. Если же сила токе преобладает в приводном элементе 7 по сравнению с первым элементом 6, то вращение выходного вала 4 происходит в обратном направлении, т.е.по чассЕой стрелке. При использовании привода для двухпозиционного регулирования электроэнергия подводится по мере срабатывания датчика попеременно к приводным элементам б и7 вследствие чего нарушается равновесие врахдающих моментов и вал 4 поворачивается на такой угол, при котором вновь достигается равновесие. Датчик в данном случае имеет перекидные контакты, KOMiviyTHрукзщие nonepeivienHO цепи питания приводных элементов 6 и 7. При работе предлагаемого привода в режиме трехпозиционного регулирования датчик имеет контактную систему, кo 1мyтирующую попеременно две разные цепи и способную находиться в третьем нейтральном положении. В данном случае вал 4 и приводимое им передаточное звено (не показано) находятся в лвух крайних положениях, а также в среднем {при обесточенных цепях питающих эл-ементы 6 и 7) . При работе предлагаемого привода в режиме непрерывного многопозиционного (пропорционального) регулирования, например в следящих системах автоматики, в схемах автоматического управления и регулирования к источнику (источникам) питания постоянно I подключены цепи, приводных элементов б и 7. Поворот вала 4 происходит при разбалансе силы тока .в приводных элементах б ;и 7.в данном случае в качестве .первичных датчиков могут быть использованы, например дифференциально-трансформаторные, вибрационные, ре статные ( реохордные ) и другие датчики Предлагаемый привод работает боле устойчиво по сравнению с известным при наличии колебаний напряжения элек трическо.го тока источника питания и внешней температуры, а также обладает щироким диапазоном скоростей выхрдного звена, что позволяет применять предлагаемый привод вместо гидравлических, электромоторных и других относительно сложных известных приводов, Формула изобретения Привод, например, для следящих систем, содержащий связанные с общим компенсатором приводные элементы, выполненные в виде проводников, установленные на опорах в корпусе и связанные с выходным звеном, а общий компенсатор выполнен в виде шэдпружиненного рычага, ртличающийс я тем, что, с целью повышения точности привода, в нем опоры установлены равномерно по окружности, выходное звено, выполненное в виде вала, установлено в центре окружности, а питание приводных элементов еыполнево разцельным. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 356416, кл. F 16 К 31/44, 1968. 2.Авторское свидетельство СССР № 555252, кл. F 16 К 31/44, 1976 (прототип) .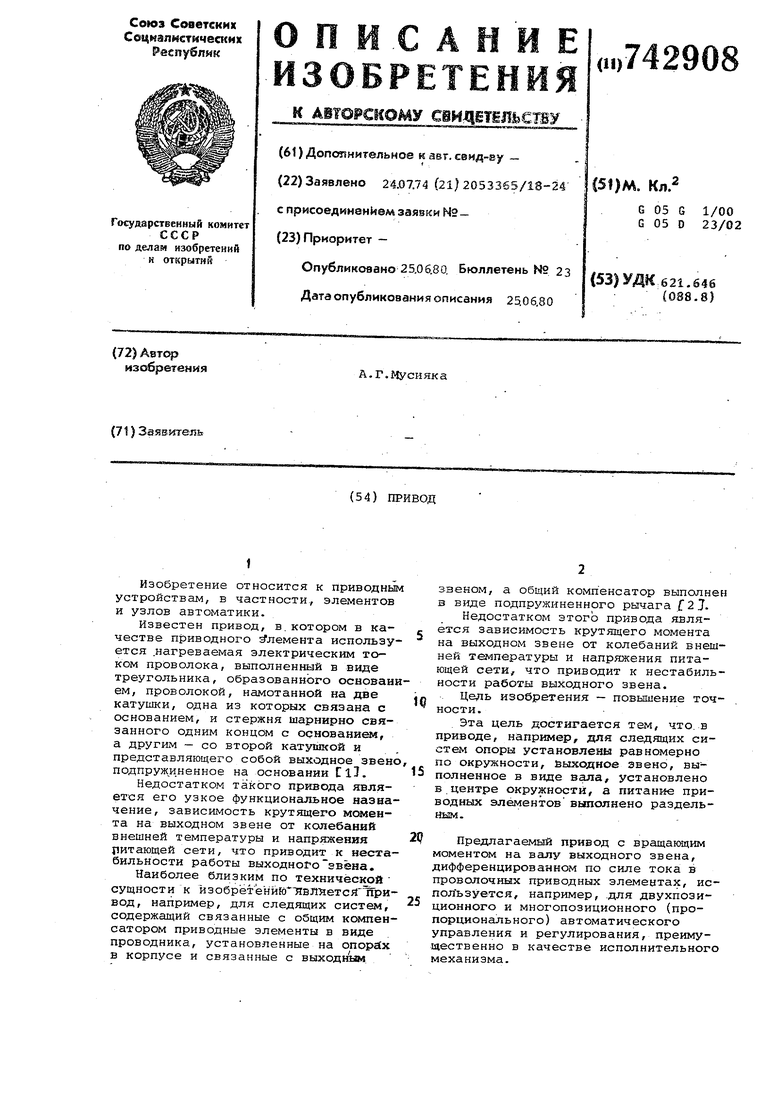
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод | 1981 |
|
SU1020798A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2067310C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Стенд для испытаний рулевых механизмов | 1988 |
|
SU1548693A1 |
| СВЕРЛЯЩИЙ ПЕРФОРАТОР И СПОСОБ КОНТРОЛЯ ЕГО РАБОТЫ | 2010 |
|
RU2439294C2 |
| ЛЕБЕДКА ПРЯМОГО ПРИВОДА С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2553793C2 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПИЩЕВЫХ ПРОДУКТОВ С МАГНИТНЫМ ПРИВОДОМ | 2003 |
|
RU2340274C2 |