1
Изобретение относится к сельскохозяйственному машиностроению и может быть иснользовано в уборочных машинах, например хлопкоуборочных.
Известен механизм подвески аппаратов уборочной машины, содержаший шарнирно связанный с рамой машины рычаг, несуш,ий секции аппаратов, гидроцилиндры подъема аппаратов и дополнительный гидроцилиндр поворота секций аппаратов 1.
При наезде на неровность поля какойлибо секции аппаратов датчики подают сигнал в гидросистему, и гндроцилиндры подъема, включенные в гидросистему машины, поднимают весь блок аппаратов, хотя под другой секцией аппаратов в это время неровностей может и не быть. Каждый ненужный подъем аппаратов прн сборе хлопка увеличивает зону кустов хлопчатника, не обработанную шпинделями, в результате чего снижаются агротехнические показатели машины.
Целью изобретения является повышение агротехнических показателей машины путем индивидуального копирования рельефа почвы секциями аппаратов.
Это достигается тем, что дополнительный гидроцнлиндр -параллельно соединен с нагнетательными трубопроводами гидроцилиндров иодъема аппаратов, при этом
каждый из иоследних снаожен дросселем одностороннего действия, установленным перед его входом, для ограничения скорости подъема аппаратов.
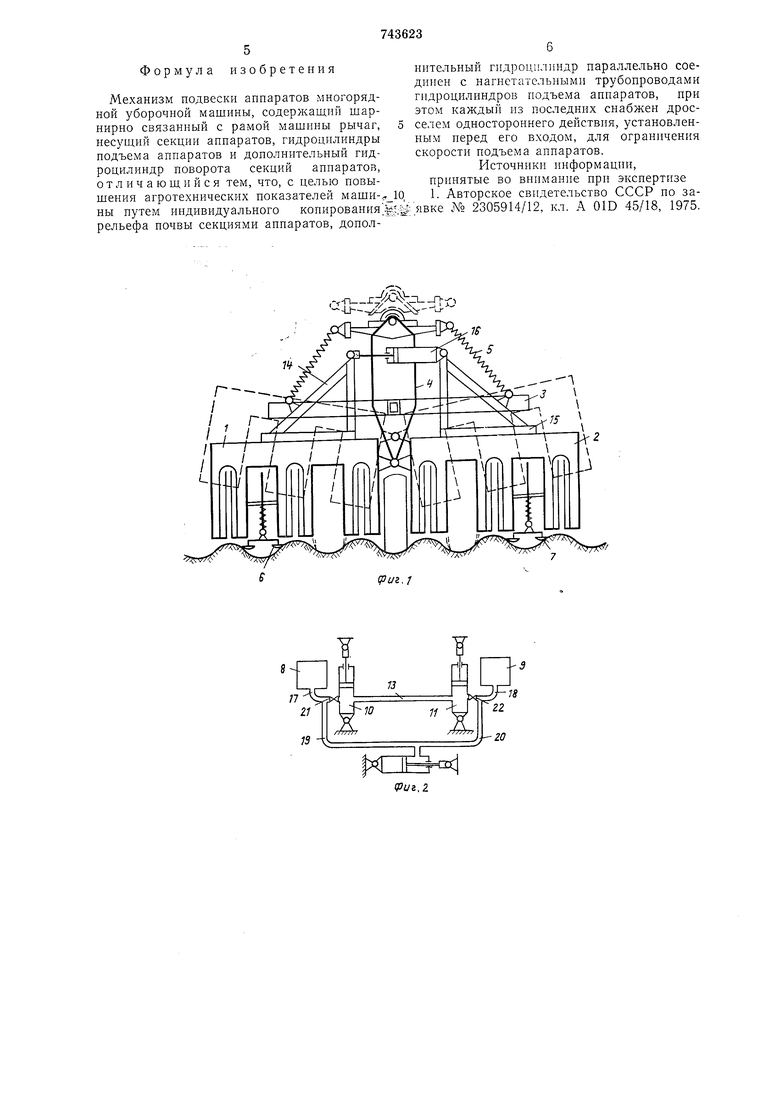
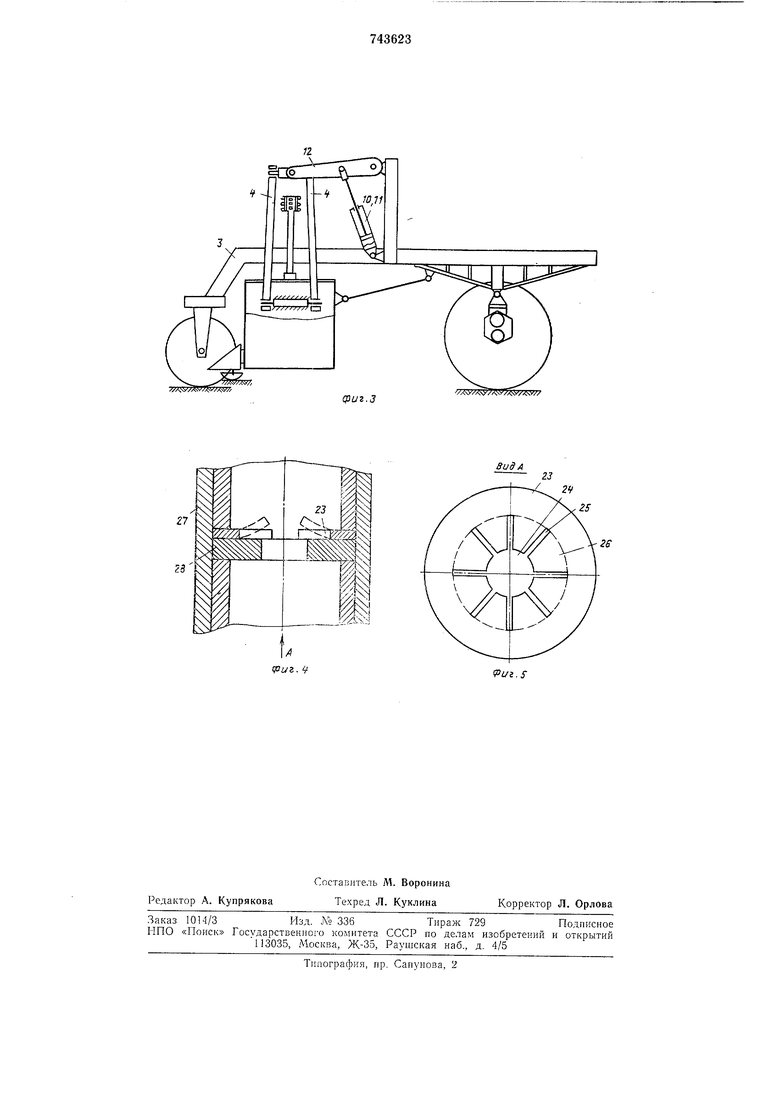
5 Иа фиг. 1 пзображеи механизм подвески аппаратов, вид спереди; на фиг. 2 - схема соедииеиия гидроцилнндров; на фиг. 3- механизм иодвески, вид сбоку; на фпг. 4- дроссель; иа фиг. 5 - вид по стрелке А
10 на фиг. 4.
Правая 1 и левая 2 секции уборочных аииаратов подвешены к раме 3 машины посредством шарнн-риого новодка 4 и стабилизаторов-пружин 5. Каждая из секций аи15 паратов снабжена датчиками-щупами б п 7 автоматического вертикального копнропания рельефа почвы аппаратами. Датчикищуиы подпружинеиы относительно секции аппаратов и через систему рычагов н тяг
20 С1;язаиы с гидрораспределптелями 8 и П гидросистемы машины.
Гидроцилиидры 10 и И вертикальиого подъема аппаратов расположены между рамой 3 машииы и рычагом 12 подвеса,
25 параллельио подсоединены к гидрорасиредел1;телям 8 и 9 и между собой связаны перемычкой 13.
Правая 1 н левая 2 секции аппаратов через кроиштейиы 14 и 15 связаны между
30 собой дополпптельпым гидроцилиндром 15,
рабочая полость которого одиозремешю связана с нагнетательными трубопроводами 17 и 18 гидроцилнндров 10 и И посредством шлангов 19 и 20 высокого давления.
Перед входом нагнетательных трубопроводов 17 и 18 в рабочие полости гидроцнлиндров 10 и И установлены дроссели 21 и 22, которые создают сопротивление поступлению жидкости в цилиндры.
На фиг. 4 и 5 показан возможный вариант конструкции дросселя. Дроссель 23 представляет собой пружинную шайбу с отверстием 24 в центре. Шайба имеет нрорези 25, носредством которых образованы упругие лепестки 26.
При установке дросселя 23 в трубопроводе 27 перед ним ставится шайба 28 с отверстием в центре, причем диаметр отверстия шайбы превышает диаметр отверстия дросселя. При прохождении жидкость без большого сопротивления раздвигает лепестки 26 и течет по трубе 27. Когда же жидкость течет обратно (в полость гндроцилиндров 10, 11), ленестки упираются в шайбу 28 и дросселируют л :идкость.
При движении хлопкоуборочной машины по нолю датчики-щупы 6 и 7 уборочных аппаратов контактируют с поверхностями грядок и ноддерживают аппараты относительно поверхности поля на определенной высоте посредством гидроцилиндров 10 и 11.
При встрече какой-либо секцией, например правой, аппаратов неровности ноля датчики 6 через систему рычагов и тяг подают сигнал на гндрораспределитель 8, который связан с гидросистемой машины. Гидрорасиределитель 8 открывает доступ жидкости в трубопровод 17 и далее через шланг 19 в рабочую полость гидроцилиндра 16. Шток гидроцилиндра 16 начинает неремеш,аться и поднимает правую секцию 1 аппаратов вокруг нижнего шарнира новодка 4.
Левая секция 2 аппаратов при этом остается в первоначальиом положении.
После проезда неровности из рабочей полости гидроцилиндра 16 под действием веса правой секции 1 аппаратов жидкость выталкивается обратно но шлангу 19, трубопроводу 17 через гидрораспределитель 8 на слив. Секция 1 аппаратов занимает свое рабочее положение.
То же самое происходит при встрече с неровностью левой секцнн 2 аппаратов. Когда на неровности наезжают одновременно правая 1 и левая 2 секции аппаратов, срабатывают сразу оба датчика 6 и 7, жидкость через распределители 8 и 9 нагнетается но трубопроводам 17, 18 и шлангам 19, 20 в рабочую иолость гидроцилиндра 16, который, стягивая кронштейны 14 и 15, поднимает вокруг нилшего шарнира обе секции аппаратов.
После проезда неровностей секции аппаратов занимают свое обычное горизонтальное положение под действием их веса. При срабатывании датчиков какой-либо одной секции, например правой, жидкость, подаваемая через распределитель 8, трубопровод Г/ и шланг 19 в рабочую полость гидроцилиндра 16, не может уйти на слив через гидрораспределитель 9, так как он в это
время закрыт.
Дроссели 21 и 22 преиятствуют иагнетанию жидкости в полости гидроцилиндров 10 и И, которые включаются в работу и поднимают весь блок аппаратов только при
наезде обеих секций 1 и 2 на неровности значительной длины и высоты. При этом вначале л идкость заполпяет рабочую полость гидроцилипдра 16, а затем, преодолев сопротивление дросселей 21, 22, - рабочие полости гидроцилиндров 10, 11.
Таким образом, при наезде на неровности значительной длнны н высоты вначале секцнн поворачиваются вокруг нижнего шарнира поводка 4, а затем иоднпмаются.
После проезда таких неровностей аннараты опускаются и занимают горизонтальное рабочее положение.
При иодъеме аппаратов в транспортное ноложенне секции 1 и 2 носредством гидроцилиидра 16 новорачиваются вокруг обшего шарнира, а затем поднимаются гидроцилиидрами 10, 11. Перемычка 13 служит для выравннвания давления в полостях гидроцилиидров 10, 11.
Подъем вокруг шарнира какой-либо одной секции при помощи одного общего гидроцилиндра 16 осуществляется за счет парушеиия равновесия масс секций 1 и 2, навешенных на общем шарнире поводка 4.
Когда секция аппаратов наезжает на неровность, иоследняя порождает реакцию, направленную на подъем этой секции. При этом, когда гидроцилиндр 16 стягивает кронштейны 14 и 15, в двнженне придет та
секция, которая иаехала па неровность, так как она етала легче. Па нее действуют реакция неровности и сила гидроцилиндра.
Если секции наехали на неровности различной высоты, то последние порождают разные но величине реакции (пропорциональные высоте), и еекции аппаратов поднимутся на разные высоты.
Введя дроссели 21, 22 перед входом нагнетательных трубонроводов 17, 18 в гидроцнлиндры 10, 11 и соединив рабочую полость дополнительного гндроцилиндра 16 с пагпетательиыми трубопроводами одповременпо правого 10 и левого И гидроцилиндров, гидроцилиндр 16, нредназначенный для новышения транспортного просвета над крайними аппаратами, становится приводом для иидивидуального копирования перовностей ночвы левой н правой секциями аппаратов. Формула изобретения Механизм подвески аппаратов многорядной уборочной машины, содержащий шарнирно связанный с рамой машины рычаг, несуидий секции аппаратов, гидроцилиндры подъема аппаратов и дополнительный гидроцилиндр поворота секций аппаратов, отличающийся тем, что, с целью новышения агротехнических показателей машины путем индивидуального кoииpoвaния рельефа почвы секциями аппаратов, дополнительныи гидроцилиндр параллельно соедииен с нагнетательпыми трубопроводами гидроцнлиндров подъема аппаратов, при этом каждый из последних снабжен дросселем одностороннего действия, установленным перед его входом, для ограничения скорости подъема аппаратов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке N° 2305914/12, кл. А 01D 45/18, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения секций шарнирно сочленного гусеничного транспортного средства | 1988 |
|
SU1525030A1 |
| ГИДРОПРИВОД ЛББПДКИ | 1971 |
|
SU310864A1 |
| Уплотнитель сельскохозяйственных культур | 1982 |
|
SU1083953A1 |
| Амортизирующее устройство гидрофицированного скрепера | 1979 |
|
SU876890A1 |
| Стенд для испытания гидроцилиндров | 1974 |
|
SU541050A1 |
| Предохранительное устройство жатки зерноуборочного комбайна | 1973 |
|
SU492251A1 |
| Хлопкоуборочная машина | 1986 |
|
SU1344279A1 |
| Гидросистема сельскохозяйственной уборочной машины | 1978 |
|
SU727176A1 |
| ГИДРОСИСТЕМА МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU352741A1 |
| Групповой шаговый гидропривод поступательного движения | 1976 |
|
SU584106A1 |
.2/i- ;j:: sJ y- 1
Jf
Vuz.1
Вид А
Pui.S
