Изобретение относится к сельскохозяйственному машиностроению и может найти применение в конструкциях хлопкоуборочных машин.
Целью изобретения является повышение производительности машины.
На чертеже представлена схема размещения узлов машины.
Хлопкоуборочная машина состоит из левой 1 и правой 2 секций уборочного аппарата, подвижных кареток 3 и 4, рамок 5 и 6, гидроцилиндрОБ 7-10, золотников 11 -14 с датчиками-ш,упцами 15-18, рамы (бруса) 19, командного распределителя 20, гидронасоса 21 и масляного бака 22.
Золотники И и 12 жестко закреплены на левой 1 и правой 2 секциях уборочного аппарата и связаны с гидроцилиндрами 7 и 8 через каналы 23-26, с командным распределителем 20 - через каналы 27-32, причем каналы 27 и 28 соединены с напорной магистралью 33, а каналы 29-32 - со слив- 20 ной магистралью 34 гидронасоса 21.
Золотники 13 и 14, в свою очередь, закреплены на секциях уборочного аппарата и связаны с гидроцилиндрами 9 и 10 через каналы 35 и 36, а с командным распределителем - через каналы 37-40.
Датчики-шупы 15-18 жестко связаны соответственно с плунжерами 41-44 золотников 11 -14, подпружиненными пружинами 45-48.
Для подъема секций уборочного аппарата Б режиме ручного управления предусмотрены каналы 49 и 50, сообщаюпдие каналы 35 и 36 гидроцилиндров 9 и 10 со сливными каналами 39 и 40. В каналах 49 и 50 расположены обратные клапаны 51 и 52. Между напорной и сливной магистралями имеется также предохранительный клапан 53.
Золотники 11, 12, датчики-щупы 15, 16, гидроцилиндры 7, 8 и каретки 3, 4 образуют блоки слежения за положением грядки
магистрали от командного распределителя 20, через обратный клапан 53 перетекает в сливную магистраль и далее в масляный бак 22.
с Поперечное отклонение грядки под левой секцией уборочного аппарата на величину ДМ|.
Датчик-щуп 15 смеидает плунжер 41 золотника 11 в соевом направлении вправо. При этом напорный канал 27 соединяется с 10 каналом 23 и рабочая жидкость поступает в штоковую полость гидроцилиндра 7, а из бес1птоковой полости через каналы 24 и 29 тоступает в сливную магистраль. В результате левая секция уборочного аппарата перемещается вправо на величину ДМ, а плунжер 41 под действием пружины 45 возвращается Б среднее положение.
Поперечное отклонение грядки под левой секцией уборочного аппарата на величину .
Плунжер 4 под действием пружины 45 смещается в осевом направлении влево, при этом напорный канал 27 соединяется с каналом 24 и рабочая жидкость поступает в бесщтоковую полость гидроцилиндра 7. Из ЩТОКОБОЙ полости жидкость через каналы 23 и 31 уходит в сливную магистраль. Левая секция аппарата при этом перемещается влево на величину дМ-i.
Поперечное отклонение грядки под правой секцией уборочного аппарата на величину дМп /дМп.
Взаимодействие датчика-щупа 16 с плунжером 42 и перемещение правой секции уборочного аппарата в этом случае происходит аналогично случаям, описанным для левой секции.
Увеличение ширины междурядий на величину дМл-|- дМп.
В этом случае одновременно работают золотники 11 и 12, левая и правая секции смещаются соотБетственно на величину дМл и ДМп. В результате рабочий аппа25
30
35
Хлопкоуборочная машина работает еле- 40 рат копирует ширину междурядий с разме- дующим образом.ром M+(AM i-f- ДМп).
При ДБИжении хлопкоуборочной маши-Аналогично работает аппарат при уменьпы перемепл.ение скользящих по поверхности грядок хлопкового поля датчиков-щупоБ 15-18 передается плунжерами золотников 11 -14 автоматического управления.
При нахождении рычага командного распределителя 20 в положении режима автоматического управления рабочая жидкость из нагнетательной магистрали 33 по напорным каналам 27, 28 и 37, 38 подается к золотникам 11, 12 и 13, 14 автоматического управления.
Рассмотрим возможные случаи работы.
Движение машины по ровному полю.
Датчики-щупы 15-18 перекатываются по вертикальной и боковой поверхности грядок, не совершая перемещений, плун- жены 41-44 золотников 11 -14 находятся в среднем положении (фиг. 2). Рабочая жидкость, поступающая по нагнетательной
50
55
шении ширины междурядий на величину ДМл дМ п. В этом случае ширина копируемого междурядья составляет М-(ДМЦ- -4- ).
Вертикальное отклонение грядки под левой секцией аппарата на величину lii.
При увеличении высоты грядки датчик- щуп 17 перемещает плунжер 49 золотника 13 в осевом направлении вверх, при этом напорный канал 37 соединяется с каналом 35 и рабочая жидкость подается в што- коБую полость гидроцилиндра 9, происходит подъем секции уборочного аппарата до тех пор, пока плунжер под действием пружины не займет среднего положения.
При уменьшении высоты грядки плунжер отжимается пружиной 47 вниз. Капал 35 соединяется со сливным каналом 39. Рабочая жидкость из щтоковой полости гидро0
магистрали от командного распределителя 20, через обратный клапан 53 перетекает в сливную магистраль и далее в масляный бак 22.
Поперечное отклонение грядки под левой секцией уборочного аппарата на величину ДМ|.
Датчик-щуп 15 смеидает плунжер 41 золотника 11 в соевом направлении вправо. При этом напорный канал 27 соединяется с 0 каналом 23 и рабочая жидкость поступает в штоковую полость гидроцилиндра 7, а из бес1птоковой полости через каналы 24 и 29 тоступает в сливную магистраль. В результате левая секция уборочного аппарата перемещается вправо на величину ДМ, а плунжер 41 под действием пружины 45 возвращается Б среднее положение.
Поперечное отклонение грядки под левой секцией уборочного аппарата на величину .
Плунжер 4 под действием пружины 45 смещается в осевом направлении влево, при этом напорный канал 27 соединяется с каналом 24 и рабочая жидкость поступает в бесщтоковую полость гидроцилиндра 7. Из ЩТОКОБОЙ полости жидкость через каналы 23 и 31 уходит в сливную магистраль. Левая секция аппарата при этом перемещается влево на величину дМ-i.
Поперечное отклонение грядки под правой секцией уборочного аппарата на величину дМп /дМп.
Взаимодействие датчика-щупа 16 с плунжером 42 и перемещение правой секции уборочного аппарата в этом случае происходит аналогично случаям, описанным для левой секции.
Увеличение ширины междурядий на величину дМл-|- дМп.
В этом случае одновременно работают золотники 11 и 12, левая и правая секции смещаются соотБетственно на величину дМл и ДМп. В результате рабочий аппа5
0
5
0
5
шении ширины междурядий на величину ДМл дМ п. В этом случае ширина копируемого междурядья составляет М-(ДМЦ- -4- ).
Вертикальное отклонение грядки под левой секцией аппарата на величину lii.
При увеличении высоты грядки датчик- щуп 17 перемещает плунжер 49 золотника 13 в осевом направлении вверх, при этом напорный канал 37 соединяется с каналом 35 и рабочая жидкость подается в што- коБую полость гидроцилиндра 9, происходит подъем секции уборочного аппарата до тех пор, пока плунжер под действием пружины не займет среднего положения.
При уменьшении высоты грядки плунжер отжимается пружиной 47 вниз. Капал 35 соединяется со сливным каналом 39. Рабочая жидкость из щтоковой полости гидроцилиндра 9 под действием веса секции аппарата вытесняется и секция опускается.
Аналогично происходит копирование высоты грядки правой секцией уборочных аппаратов.
Перевод уборочных аппаратов в транспортное положение.
Для осуществления подъема уборочных аппаратов в режиме ручного управления рычаг командного распределителя. 20 переполя в вертикальном и поперечном направлении каждой секцией уборочного аппарата, что позволяет повысить полноту сбора хлопка.
Формула изобретения
Хлопкоуборочная машина, содержащая брус, рамки для установки секций уборочного аппарата, средство для изменения расстояния между этими секциями и гидросисводится в положение, при котором напор- Ю тему, отличающаяся тем, что, с целью повы- ная и сливная магистрали меняются места-шения производительности машины, она снабми, в этом случае рабочая жидкость че- жена блоками слежения за положением рез обратные клапаны 51, 52, каналы 49, грядки, каждый из которых содержит зо- 50 и 35, 36 поступает в штоковую полость лотник, закрепленный на соответствующей гидроцилиндров 9, 10 осуществляя подъем секции уборочного аппарата, датчик-щуп уборочного аппарата относительно рамы ма- для взаимодействия с боковой поверхно- шины.
Опускание аппаратов в рабочее положение осуществляется с помощью переключения рычага командного распределителя в положение, соответствующее автоматиче- 20 средство для изменения расстояния скому режиму работы.между секциями уборочного аппарата выПружины 45-48 обеспечивают постоян- полнено в виде кареток, размещенных на ный контакт датчиков-щупов 15-18с поверх соответствующих рамках с возможностью костью грядок хлопкового ПОЛЯ.перемещения вдоль бруса и кинематичеГидравлическая схема предложенного ски связанных с гидроцилиндрами соответ- аппарата обеспечивает одновременное авто- ствующих блоков слежения за положением матическое копирование грядок хлопкового грядки.
стью грядки, жестко связанный с плунжером золотника, и гидроцилиндр, закрепленный на соответствующей рамке и подключенный через золотник к гидросистеме.
поля в вертикальном и поперечном направлении каждой секцией уборочного аппарата, что позволяет повысить полноту сбора хлопка.
Формула изобретения
жена блоками слежения за положением грядки, каждый из которых содержит зо- лотник, закрепленный на соответствующей секции уборочного аппарата, датчик-щуп для взаимодействия с боковой поверхно-
средство для изменения расстояния между секциями уборочного аппарата выстью грядки, жестко связанный с плунжером золотника, и гидроцилиндр, закрепленный на соответствующей рамке и подключенный через золотник к гидросистеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1972 |
|
SU352617A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1971 |
|
SU307764A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Двухсекционное гидромеханическое следящее устройство сельскохозяйственной машины | 1989 |
|
SU1618298A1 |
| Устройство для автоматического копирования рельефа почвы | 1972 |
|
SU467722A1 |
| Устройство для междурядной обработки почвы | 1975 |
|
SU662031A1 |
| Устройство для управления самоходной уборочной машиной | 1979 |
|
SU879060A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Устройство для обработки почвы в рядах растений | 1982 |
|
SU1069651A1 |
| Устройство для автоматического копирования рельефа почвы | 1973 |
|
SU682176A2 |
Изобретение относится к сельскохозяйственному машиностроению и позволяет но- высить производительность хлопкоуборочной машины за счет одновременного копирования уборочными аппаратами ширины междурядий и высоты грядок. Машина имеет левую 1 и правую 2 секции уборочных аппаратов, которые могут перемеш,аться относительно рамок 5 и 6 посредством кареток 3 и 4 и силовых гидроцилиндров 7 и 8, связанных через золотники 11 и 12, датчики- щупы 15, 16 с боковыми поверхностями грядок. Вертикальная копировка осуществляется посредством силовых гидроцилиндров 9 и 10. связанных через золотники 13, 14 и датчики-щупы 17, 18с поверхностью грядок. 1 ил. (Л с 00 4 4; го со 29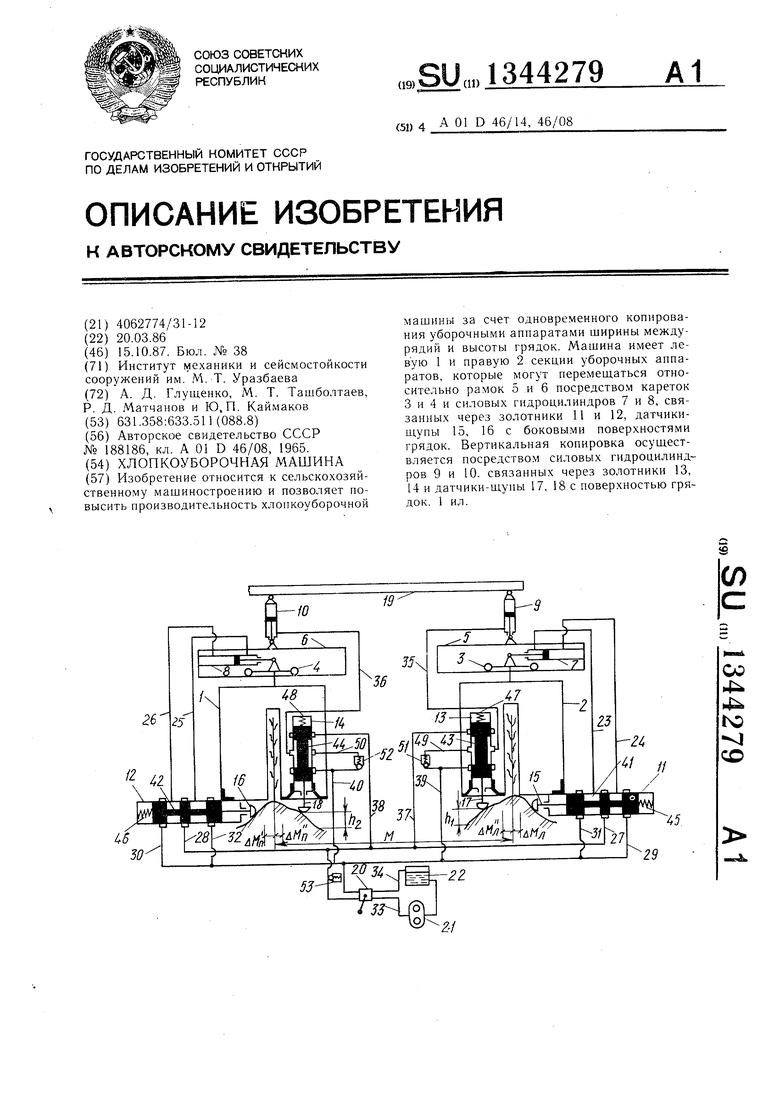
| НАВЕСНОЕ УСТРОЙСТВО ДЛЯ ПРИСОЕДИНЕНИЯ ПРЕИМУЩЕСТВЕННО ХЛОПКОУБОРОЧНЫХ АППАРАТОВ | 0 |
|
SU188186A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
