через автолог, одной ступенью каждый из планетарных механизмов, кроме первого и последнего, связан с предыдущим планетарным механизмом, а другой ступенью - с последуюш,им планетарным механизмом.
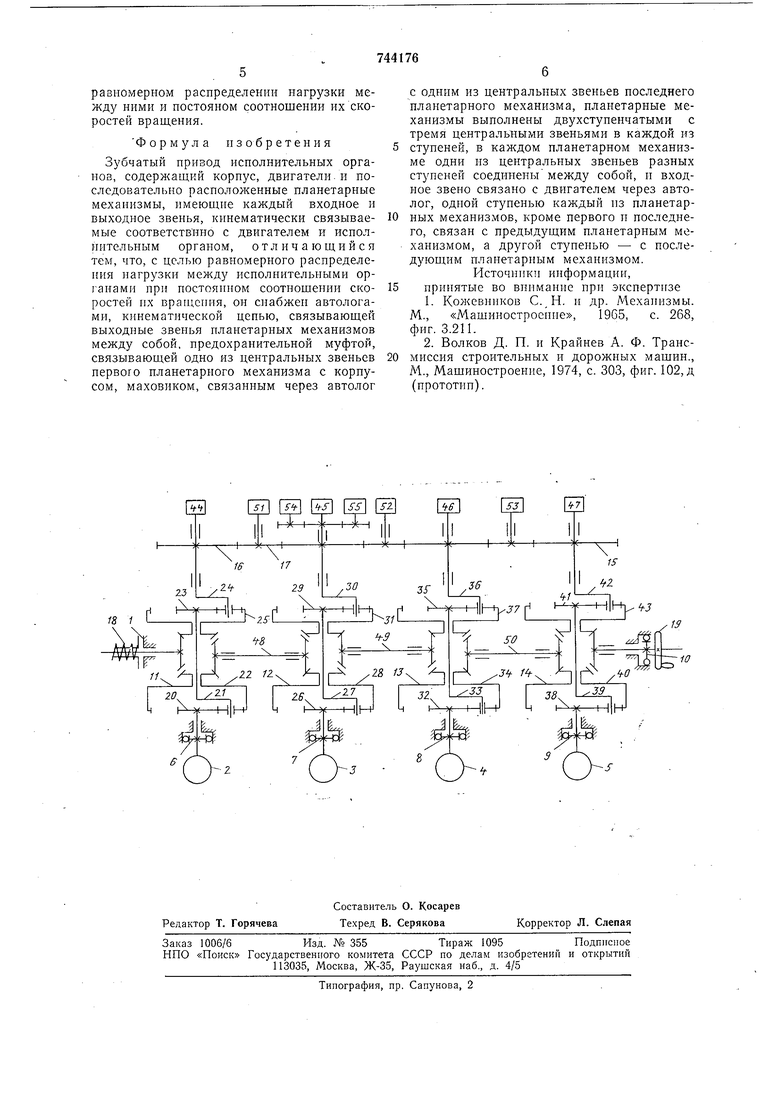
На чертеже изображена кинематическая схема предлагаемого привода с четырьмя планетарными механизмами (хотя в общем случае число их может быть и большим).
Зубчадгый привод исполнительных органов содержит корпус 1, двигатели 2-5, автол оги 6-10, двухступенчатые планетарные механизмы 11-14, кинематическую цепь 15, состоящую из одинаковых пар колес 16 и 17, образующих рядную зубчатую передачу, предохранительную муфту 18 и маховик 19. Планетарный механизм И включает центральные звенья 20-22, образующие первую ступень , и центральные звенья 23-25, образующие вторую ступень, планетарный механизм 12 - центральные звенья 26-28 первой ступени и центральные звенья 29-31 второй ступени, планетарный механизм 13 - центральные звенья 32-34 первой ступени и центральные звенья 35-37 второй ступени, а планетарный механизм 14 - центральные звенья 38-40 первой ступени и центральные звенья 41-43 второй ступени.
Входные звенья 20, 26, 32 и 38 соответственно через автологн 6, 7, 8 и 9 связаны с двигателями 2, 3, 4 и 5, выходные звенья 24, 30, 36 и 42 соответственно связаны с исполнительными органами 44, 45, 46 и 47 и кинематической ценью 15 между собой. В планетарных механизмах И, 12, 13 и 14 соединены между собой звенья 21 с 23, 27 с 29, 33 с 35 и 39 с 41 соответственно. Звено 25 связано через муфту 18 с корпусом 1, звено 22 - валом 48 со звеном 28, звено 31 - валом 49 со звеном 37, звено 34 - валом 50 со звеном 40, а звено 43 - через автолог 10 с маховиком 19.
К колесам 17 кинематической цепн могут быть присоединены дополнительные нспол.нительные органы 51-53. Каждое из выходных звеньев, например звено 30, может быть кинематически связано с грунпой дополнительных исполнительных органов, например органов 54, 45 и 55. Предлагаемый привод работает следующим образом.
При включении одного или нескольких двигателей вращение от них по соответствующим кинематическим цепям передается исполнительным органам.
При включении, например, только двигателя 3 звенья 20, 32 и 38 благодаря автологам будут заторможены, звенья 25 и 43 также будут заторможены из-за того, что они связаны с корпусом: первое - через муфту 18, а второе - через автолог 10. Вращение связанного с двигателем 3 звена 26 передается звеньям 27 и 28. Вращение от звена 28 передается через вал 48 звеньям 22, 21, 23 и выходному звену 24.
Вращение звена 27 передается звену 29, а от него звеньям 30 и 31. От звена 31 вращение через.вал 49 передается звену 37, а от него звеньям 36 н 35. От звена 35 вращение передается звеньям 33 н 34. Вращенне от звена 34 через вал 50 передается звену 40, а от него звеньям 39, 41 и 42.
Такнм образом, вращение двигателя 3 передается всем выходным звеньям 24, 30,
36 и 42 и соответственно связанным с нимн исполнительным органам 44, 45, 46 н 47. При этом в силу существующих кинематических связей скорости вращения выходных звеньев одинаковы. В общем случае прн
любом из возможных чисел включенных двигателей вращение от них передается но тем же кинематическим цепям. При этом в зависимости от числа включенных двигателей обороты выходных звеньев 24, 30, 36 и
42 всегда равны между собой и определяются по формуле
П2 + Пз + Я.| + ns,
- 4(1-й)
где П2, Пз, «4, Пъ - обороты двигателей 2, 3,
4, 5;
/С - внутреннее нередаточное отнощение стуиеии плаиетариого мехаиизма.
При всех включенных двигателях, имеющих одинаковые обороты, валы 48, 49 и 50 неподвижны и вращение от каждого из двигателей нередается только соответствующему выходному звену. В силу существующих кииематических
связей моменты на выходных звеньях определяются выражением
II
1
м,.
М,4 : М,„ г:: M,e М,, 30
1-1
где Mi - iviOMCHTbi сопротУшлёнйя исполнительных органов, приведенные к выходно узвену 24; ,2,3,... k; k - число исполнительных органов.
Наличие предохранительной муфты 18 нозволяет повыспть надежность работы привода за счёт предотвращения его поломок при перегрузках.
Наличие маховнка 19 и автолога 10 позволяет упростить наладку привода и осуществлять вращение иланетариых механизмов и исполнительных органов при выключениых двигателях вручную. При вращении маховнка 19 все входные звенья 20, 26, 32 и 38 благодаря соответствующим автологам 6, 7, 8 н 9 остаются ненодвнжными, а передача вран1,ения от маховика 19 к выходиым звеньям 24, 30, 36 н 42 осуществляется по тем же кинематическим цепям, что и при включенных двигателях.
Такое выполнение привода позволяет сообщать вращение нескольким параллельно работающим исполиительным органам при
равномерном распределении нагрузки между ними и ностояном соотношении их скоростей вращения.
Формула изобретения
Зубчатый привод исполнительных органов, содержащий корпус, двигатели, и последовательно расположенные планетарные механизмы, имеющие каждый входное и выходное звенья, кинематически связываемые соответствнно с двигателем и нсполнительным органом, отличающийся тем, что, с целью равномерного распределения нагрузки между исполнительными органами при постоянном соотношении скоростей их вращения, он снабжен автологами, кинематической ценью, связывающей выходные звенья планетарных механизмов между собой, предохранительной муфтой, связывающей одно из центральных звеньев иервого планетарного механизма с корпусом, маховиком, связанным через автолог
с одним из центральных звеньев носледнего планетарного механизма, планетарные механизмы выполнены двухступенчатыми с тремя центральными звеньями в каждой из ступеней, в каждом планетарном механизме одни нз центральных звеньев разных ступеней соедннеиы между собой, н входное звено связано с двигателем через автолог, одной ступенью каждый нз планетарных механизмов, кроме первого и последнего, связан с предыдущим планетарным механизмом, а другой стуненью - с носледующнм планетарным механизмом. Источник информации,
принятые во внимание при экспертизе
1.Кожевников С. Н. н др. Л ехаиизмы. М., «Машиностроенне, 19G5, с. 268, фиг. 3.211.
2.Волков Д. П. и Крайнев А. Ф. Траисмиссия строительных и дорожных машин.,
М., Машиностроение, 1974, с. 303, фиг. 102, д (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод протеза руки | 1979 |
|
SU825064A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703897A1 |
| РЕКУПЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2006 |
|
RU2350807C2 |
| ПРЕДОХРАНИТЕЛЬНО-ЗАПОРНЫЙ КЛАПАН | 2002 |
|
RU2234019C2 |
| Гидроинерционный трансформатор вращающего момента | 1991 |
|
SU1786301A1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| ИНЕРЦИОННАЯ ТРАНСМИССИЯ | 1994 |
|
RU2160191C2 |
| Автоматический инерционный транс-форматор крутящего момента | 1972 |
|
SU508622A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ЗАТЯЖКОЙ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2037392C1 |
