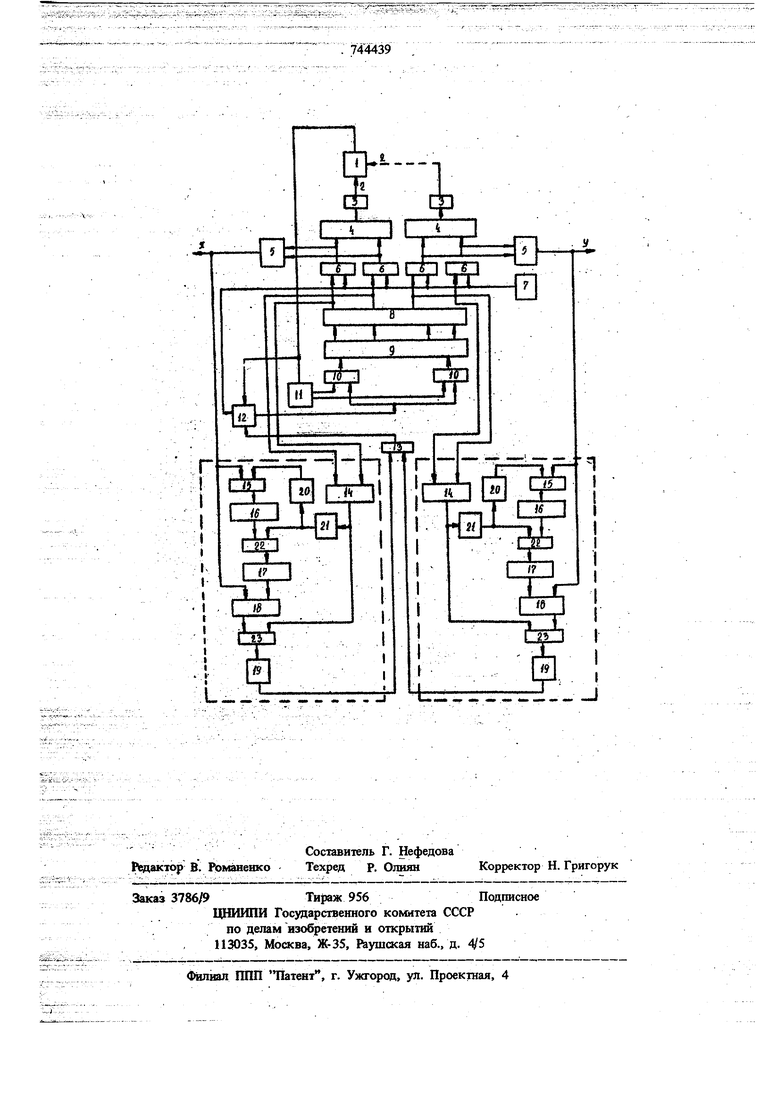
, . ;. 1 Изобретение относится к автоматике, и вычислительной технике и может использоваться, например, при вводе графической информации в ЭЦВМ, в частности :контуров1 деталей июейных изделий. Известны цифровые следящие системьь пред назначенные для автоматического считывания двухмерной графической «нформавди t1. Наиболее близкой к предлагаемой по техг нической сущности является цифровая следящая система с совмещенным тактом поиска и обхода, содержащая задатчики направления щага и размера щага, выходы которых через первые элементы И соединены со входами реверсивного счетчика, выходы которого через дешифратор и вторые элементы И, вторые входы которых соединены с генератором импульсов, соединены с соответствующими входами координатных счетшков и с блоками управления, вы ходы которых подключены к щагрвым двигатейям, кинематически связанным со считывающим устройством, выход которого соединен со входами задатчиков направления щага и раз мера щага, второй вход задатчика размера шага соединен с выходом генератора импульсов 2. Недостаток этой системы заключается в недостаточной надежности при считывании сложных кривых или контурных изображений. Так, при отслеживании кривых или контурных изображений возможно возникновение движения фотоэлектрического узла по петле в области острого угла,, котаа растр-элемент фотоэлектрического узла вблизи верщины угла, двигаясь по одной его стороне, переходит на другую, уже отслеженную, сторону угла. Цель изобретения - повыщение надежности системы. Поставленная цель достигается тем, что в систему введены третий элемент И и два блока определения повторяющихся значений координат, перйые входы которьи соединены с выходами координатных счетчиков, вторые и третьи входы - с выходами дешифратора, а выходы через третий элемент И - со входом задатчика размера щагг, причем блоки определения повторяющихся значений координат состоят из последовательно соединенных формирователя импульсов реверса, первого и второго элементов задержки, четвертого элемента И, первого регистра, пятого элемента И, второй вход кото рбго соединен с выходом первого элемента задержки, второго регистра, блока сравнения, ше того элемента И, второй вход которого соединен с выходом формирователя импульсов реве са, и триггера, причем выход триггера соедшен с выходом блока, вторьм входы четвертого эле мента И и блока сравнения соединеш с первы входом блока, а входы формирователя импуль сов соединены со вторым и третьим входами блока. Введенные блоки позволяют совместить определение петлеобразующего движения фотоэлектрического узла на сложных учаспсах от слеживаем6й кривой с выходом из него путем определения в;торяющегося положения фотоэлектрического узла в момент реверсирования его движений по каждой координате. На изображена блок-схема предлагаемой цифровой следящей системы. Система содержит считывающее устройство кинематическую передачу 2, шаговые двигатели 3, блоки 4 управле ЕШя, координатные счетчики 5, элементы И 6, 10, 13, 15, 22, 23, генератор 7 импульсов, дешифратор 8, реверсивный счетчик 9, задатчик 11 напра:Ёл0ния Шага, задатчик 12 размера шага, формирователь 14 импульсов реверса, регистры 16 и 17, блок 18 сравнения, триггер 19, элементы задержки 0 и 21. ; ; , , , . ,; ; . . Система работает следующим образом. При отслеживании кривой или контура изоб ражения фотоэлектрический узел 1 перемещается шагами равной длины параллельно координатным осям системы. Перемещение считывающего устройства 1 осуществляется при помощи двухкоординатного электромеханического шагового привода, включающего в себя по каж дой координате механическую (Передачу 2, шаговые двигатели 3 и блоки 4 у1аравлет Я шаго выми двигателями. Для продвижения считывающего ycTpOHCTisa 1, импульсы генератора 7 проходят через элеменП) И 6, один из входов .которых открыт дешифратором 8, подсчитьь координатными счетчиками 5 я отрабаты ваются щаговыми двигателями 3. Дешифратор 8 управляется потенциалами счетчика 9. Четыре различных состояния счетчика 9 соответствуют четырем основным направлениям; движения считыванадего устройства 1, причем каждое постедуюпхее направление Движения повернуто на 90 по отношению к предьщущему. Если фотоэлектрический узел находится на черном поле носителя информации, дви кбние происходит по часовой стрелке, если на белом, то - против часовой стрелки. Изменение состояний 4 счетчика 9 осуществляется с помощью элементов И 10 к задатчика 11 направления щага. Блок 11 управляется сигналами переходов, снимаемых со считывающего устройства 1. Они возникают при пересечении растр-элементом гранищ 1 кривой иди контурного изображения. Сигналы переходов воспроизводятся задатчиком И направления щага и соответствует на его выходе положению считывающего устройства на белом или черном поле носителя информащш. Сигнал с выхода задатчика 11 направления шага через элементы 10 реверсируют счетчик 9, цодсчитьшаюидай импульсы генератора 7, проходящие через задатчик 12 размера шага. , Если в течение двух последовательных шагов отсутствуют сигналы о пересечении границы кривой, задатчик 12 размера шага вьщает импульсы через один. Движение происходит по сторонам квадрата так, что перемещения считывающего устройства увеличиваются в два раза в каждом направлении до нового пересечения. Выход Из возможной петли происходит следующим образом. Формирователь 14 импульсов реверса вырабатывает импульс реверса в момент изменения потенциалов на выходах дешифратора 8, соответствующих началу вьшолнения считьшающим устройством реверсивного движения. При помощи элементов И 15 и 22, регистров 16 и 17 и элементов задержки 20 и 21 вьшолняется следующая последовательность работы блока. Содержимое регистра 17 сравнивается схемой 18 сравнения с положением считьшающего регистра 17, сравнивается схемой 18 сравнения с положением считьшающего устройства, зафикофованном в координатном счетчике 5. Если содержимое счетчика 5 и регистра 17 не равно, то содержимое регистра 16 переписывается в . регистр 17, после этого положение узла содержимого счётчика 5 эаносится в регистр 16 и слежение за контуром продолжается. При совпадеюш положений считьшающего устройства . по каждой из координат, т.е. когда она возвращается в ранее пройденное положение, элемент И 13 открывается и сигнал совпадения через него проходит на вход эадатчика 12 размера шага, в результате чего последний вьщает импульсы через Два. Счнтьюающее устройство сначала перемещается по ранее выбранному направлению до попучеккя сигнала перехода, т.е. до пересечения кривой, или движение происходит по сторонам квадрата так, что перемещение считьшающего устройства звеяичнвается в четыре раза в каждом направлении до пересечения кривой. В обоих случаях происходит выход из петлеобразующего движения. Внедрение цифровой следящей системы для ввода графической информации в ЭЦВМ, в частности контуров деталей швейных изделий позволяет повысить надежность системы и сократить время отслеживания за счет устранения вмешательства оператора при возникновении пе лербразующего движения фотозлектрического узла на сложном участке контура. Формула изобретения 1. Цифровая следящая система, содержащая задатчики направления шага и размера шага, выходы которых через первые злёмёнты И соединеиы со входами реверсивного счетздка, выходы которого через дешифратор и вторые злементы И, вторые входы которых подключены к генератору импульсов, соединены с соответствующими входами координатных счетчйков и с блоками управ}1ения, выходы которых подключены к шаговым двигателям, кинемати чески связанным со считъгаающим устройством, выход которого соединен со входа1мги задатчиков направления шага и размера шага, второй вход задатчика размера шага соединен с выходом генератора импульсЬВ, отличающаяся тем, что, с целью повышения надежности, в систему введены третий злемент И и ч два блока определения повторяющихся значений координат, первые входы которых соединены с выходами координатных счетчиков, вторые и третьи входы - свходами дешифратора, а выходы через третий элемент И - со входом Задатчика размера шага. 2. Система по п. 1, отличающа;я Ся тем, ijilb блоки определения повторяющйхс я значений коордитт содержат последовательно соединенные формирователь импульсов реверса, первый и второй элемешы задержки, четвертьш злемент И, первый регистр, пятый злемент И, второй вход которого соединен с выходом первого элемента задержки, второй рёгистр блок сравнения, акекА элемент И, второй вход которого соединен с выходом форкга- роватепя импульсов реверса,, и триггер, выход которого соед1шен с выходом блока, вторые входы четвертого элемента И и блока сравнения соединены с первым входом блока, а входы формирователя импульсов реверса соедашены со вторым н третьим входакга блока. Источникн информации, првняше во вннмашю при зкшертизе - 1. Петренко А. И. и др. Обработка графической информация на ЭВМ. Ю1ев, Техника, 1974.. 2. КовалевоскЁ В. А., Семеновосий А. Г. Цифровая следящая стстемя питающего автомата. - Автоматика и приборостроение, 1960, № 1 (прототип).
auzj
IB
л , ,L
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Устройство для считывания графической информации | 1977 |
|
SU674054A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1976 |
|
SU798907A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1124349A1 |
| Автомат для присоединения проволочных выводов полупроводниковых приборов | 1987 |
|
SU1481871A1 |
| Устройство для считывания графической информации | 1981 |
|
SU964675A1 |
| Устройство для программного управления | 1986 |
|
SU1416938A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1013989A1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| Устройство для считывания графической информации | 1988 |
|
SU1606980A1 |