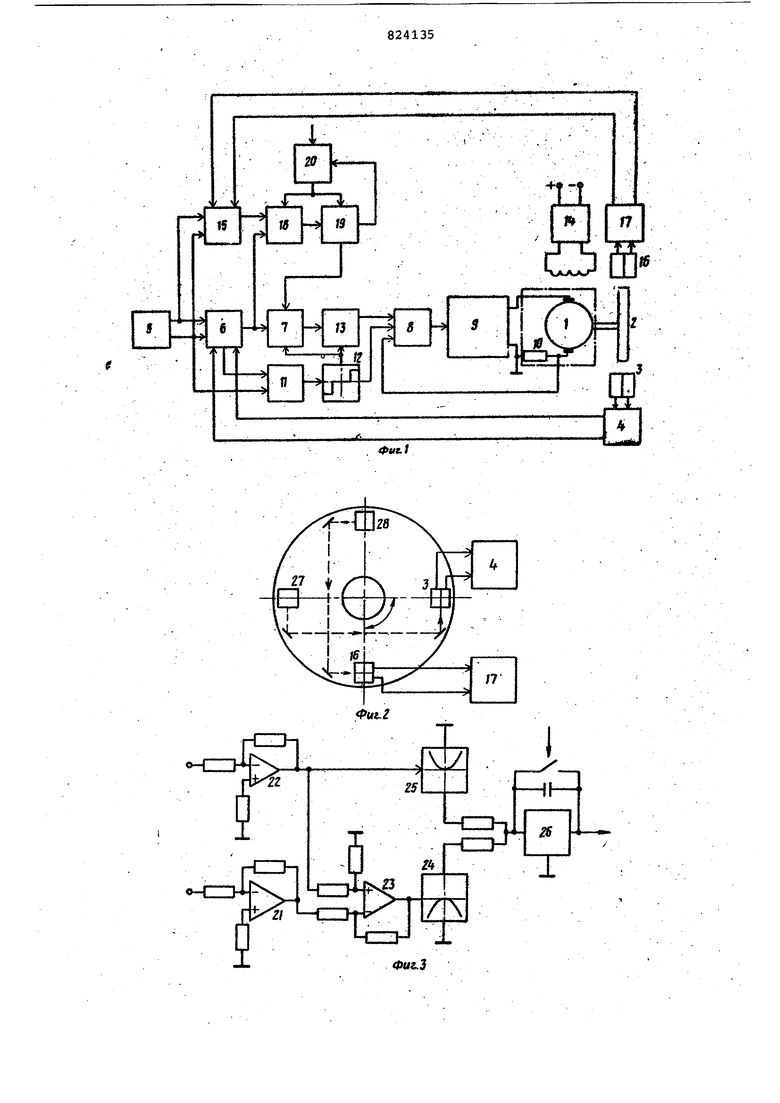
- ,..Г; .-. . Изобретение относится к.автомати ческому управлению и может быть ис пользовано в фазовых системах .управления прецизионными электропрй-водами Наиболее близкой по технической сущности к предлагаемому изобретению является система управления электроприводом, содержащая последовательно соединенные регулятор тока,, имротноймпульсный прербраэо.ватель, двигател и датчик угла, первый и второй фотоприемники, выходы которьдх соединены ссоответствующими первым и вторым формирователялж гармонических сигналов, выходы первого формирователя гармонических сигналов соединены соответственно с первым и вторым входами первого фазового дискриминатора третьи и четвертые входы которого соединены с соответствующими выходами задающего генератора, первый выход .первого фазового дискриминатора соединен с первым входом регулятора положения, второй выход - с первым входом частотного дискриминатора, а третий вход - со вторым входом частотного дискриминатора, второйвыход двигателя соединён со вторым входом регулятора тока. Однако известное устройство не позволяет реализовать высокие потен-, циальные точностные возможности непрерывных фазовых систем управлений электроприводами, работающими в широком диапазоне скоростей и в условиях изменяющихся режимов нагрузки (т.е. при деформациях спектральных характеристик, действующих на систе лу возмущения). Цель изобретения - повышение точности регулирования углового положения или скорости непрерывной фазовой системы за счет подавления устраниких возмущений и минимизации ошибок системы, вызванных неустранимыми возмущениями при изменении в широком диапазоне скорости вращения или .нагрузки. Поставленная цель достигается тем, что система содержит последовательно соединённые нелинейный блок и ключ и последовательно соединен ные второй фазовый дискриминатор, блок вычисления дисперсии, блок . поиска минимума дисперсии и блок управления, выход которого соединен со вторым входом блока вычисления дисперсии, а через блок поиска минимума дисперсии со вторым входом регулятора П ложения, первый вход которого соединен с третьим входом блока вычисления дисперсии, выход частотного дискриминатора соединен со входом нелинейного блока, первый выход которого соединен с третьим входом регулятора положения, а второй выход - с третьим входом регуляtopa тока, выход регулятора положения - через ключ соединен с первым входом регулятора тока, первый и второй выходы второго формирователя ; гармонических сигналов соединены с , соответствующими входаг-ш .второго .фа.зового дискри минатора,/третий и четвертый входы которогосоединены соответственно с первым и вторым выхог дами задающего генерйтора. На фиг. 1 изображена общая функци нальная схема адитивной cHCTetviH / управления; на.фиг. 2 фотоэлектрический датчик угловых перемещений, на фиг . 3 - структура блока вычисления дисперсии действительной угловой Ошибки; на фиг 4 - логарифмическая амплитудная характеристика системы (ЛАХ). . Система содержит, основную непрерывную фазов.ую систему с внутренним . ikoHTypOM регулирования тока якоря ;(двигатель 1), фотоэлектрический дат чик 2 угловых перемещений со сдвоенным первым фотоприемником 3 и сдвоен . ным- первым формирователем 4 .гармонических сигналов датчика,задающий .генератор 5 стабильных частот, основ ной .первый непрерывньвй фазовый диск. . риминатор б, перенастраиваемый ПИД; регулятор 7 положения, ПИ-регулятор 8 тока якоря, силовой транзисторный широтно-импульсный преобразователь 9 (шунт 10), трёхпозиционную. подсистеглу автоматической синхронизации (аналоговый) частотный дискриминатор 11, нелинейно логический блок 12, аналоговый ключ 13), выполненную в виде трехпозиционной системы регули рования частоты скорости) , выключа мой в синхронной режиме; локальную систему 14 стабилизации потока, под систему -поиска (экстремума) шнимyм дисперсии действительной угловой или скоростной ошибки в функции час тоты среза основной фазовой системы (дополнительный второй непрерывный фазовый дискриминатор 15, дополнительное измерительное устройство со вторым фотоприемником 16 и вторым формирователемД7 гармонических сиг налов, блок 18 вычисления дисперсии действительной угловой или скоростной ошибки, блок 19 поиска минимума дисперсии ф1ибки системы , блок-20 управления, усилители 21-23, квадра торы 24 и 25, интегратор 26, освети тели 27 и 28). Работа адаптивной фазовой систем осуществляется следукяцим образом и ожет быть расчленена на ряд этаов. .... .. На первом этапе, начинающемся посе вклкчения системы стабилизации отока и подачи частоты Я ± об W-j существляется разгон механизма-до колосинхронной скорости, контролируемый трехпозиционным контуром, ре лирования частоты {скорости). Приняая структура контура регулирования астоты при прстоянном моменте сухого рения обеспечивает разгон механиза с постоянным ускорением. На--этом этапе посредством ключа 13 контур регулирования углового положен1 я , (фазного сдвига) остается oтключeнны а в интеграторе регулятора 7 сигналом логического, блока 12 нели.нейно уста-, навливаютсянулевые начальные условия.. На .втором этапе, начинакядемся при вхожценйи. рассогласовании частот ЬО т, - 00 g в зону, нечувствительности блбка 13, контур регулирования частоты отключается, включается контур .регулирования фазы и происходит втягивание фазовой; системы в синхронизм при начальной частоте орезасОсн Р° ответст-вующей середине интервала .ее изменения.; Направление движения системы .определяется частотой Я t оС 60 э частоте SI «-ос. Ы 3 соответствует двиясе.ние вперед J- а ч.астоте . OOj - движение назад-. По окончании процесса синхронизации и после под-ачи сигнала Оптимизация включается подсистема пои.ска минимума дисперсии действительной .угловой или скоростной . ошибки функции частоты среза фазовой системы. Для и змepeн Iя дисперсий, дей.ствительной угловой или скоростной ошибки,- являющихся мерой точности фазовой системы при регулировании соот-. ветственно угла поворота или скор.ости, в и.зобретении используются два смещенных относительно друг друга по обороту лимба устройства измерения фазового рассогласования, состоящих из двух фотооптических систем и двух фазовых дискриминаторов 6 и 15 работающих в синфазном режиме. Фотоэлектрический датчик угловых перемещений с обтюрационным сопряжением диаметрально противоположных участков растра (см.фиг..2} содерЯшт два осветителя 27 и 28 и два спаренных фотоприемника 3 и 16, каждый из которых состоит из двух фотодиодов, изготовленных, на одном Кристалле, Гармонические сигналы, сформированные в сдвоенных блоках 4 и 17 поступсоот на фазовые дискриминаторы 6 и 15. Структура блока вычисления дисперсии действительной угловой ошибки изображена на фиг.З . Шходные напряжения V и Vg идентичных усилителей 21 и 22, предназначенных для усиления сигналов дискриминаторов 6 и.15, связаны с действительной угловой ошибкой & бдд(1) механизма со отношениями у,7.-кф-к &9м1)-даг,;м, . .K..&Sf,,,lt); где Лб f, , лбпг помехи, обусловленные погрешностью на несения штрихов на . растре, 2, - дискретность датчик Кфд- коэ,ффициент передач фазовых дискриминат ров , . . К - коэффициент усилени усилителей 21 и 22. При разнесении устройств съема информации об угловом положении на угол QHK / при котором корреляционная фукнция (91ошибки л QD датчи . ca угловых перемещений обращается в ноль, помехи &Qn-i пч оказывают ся взаимно некоррелированнцми. Кроме того, исчезает корреляция также меж .ду лб м (} и Q ti2 W- При этом средние квадраты величин V-j-V j находятся в соответствии с выражениями . iv,.. .Учитывая, что помехи&бпчЧ ивп Ь) относятся к одному и тому же стационарному процессу, выполняется равен- ° .. ;ii)i). ;: На основании последних, трех выражений находим : D9i - cpA l -ilV 4Vy где OQ - дисперсия действительной угловой ошибки &. в lyiit). Для реализации полученного алгоритма вычисления дисперсии угловой ошибки помимо усилителей 21 и 22 используются суммирующий усилитель 23, два квадратора 24 и 25, интегратор .26 на усилителе с модуляцией.и демодуляцией, осуществляющий равномерно взвешенное усреднение за конечный интервал времени Т. . При измерении дисперсии действительной ошибки по скорости усилители 21 и 22 должны быть заменены двумя идентичными друг другу дифференцирующими усилителями. С учетом масштабных коэффициентов .Ь квадраторов и масштабного коэффициента Т/Те интегратора соотношения между сигналами VOQ Уо дисперсии действительной ошибки и дисперсиями D( угловой и скоростной ошибок находятся в виде Ч ФАТ Ь.О где Tg - постоянная времени дифферен цирущнк усилителей. При настройке контура регулирования тока якоря на предельное быстродействие ЛАХ основной фазовой системы может принимать вьд 3-1-2 или 3-2-1-2 фиг.4 . При этом, передаточная функция перенастраиваемого регулятора 7 может быть представлена выражением . I V с / о Е w ISr I частота среза системы, где ол. - размерный коэффициент пропорциональности. С целью быстрого выхода в окрестность экстремума и отслеживания дрейфу1эдего положения экстремума в подсистеме поиска минимума длсперсии действительной ошибки использован комбинированный алгоритм поиска с перенастройкой в окрестности экстремума алгоритма метода дихотомии на шаговый автоколебательный алгоритм. . При пуске системы- поиска минимума вначале реализуется алгоритм поиска по методу ДИХОТОМИЙ, при котором ве.личина i-того рабочего шага1лыс(1 и его знак s-JgnuW,..; определяются соотношениямиГ / SoOc I ign &(JcV--st4np 5c; -Т r°i cvгде Д.СОс начальный интервал неопределенности, - величина пробного ,- частота среза фазо вой системы на i -.ом рабочем шаге. После формирования последнего -того pa6o4jro шага дихотоминв блоак 20 и 19 осуществляются переключеия, обеспечивающие.перестройку алоритма поиска методом дихотоми а шаговый автоколебательный cyiroитм поиска. Величина рабочего шага знак при шаговом автоолебательном алгоритме поиска предтавлены в виде формул , U cJ4-J l ceb-c° ) cj. ci g i°i-°i-0Время поиска экстремума определятся числом В шагов дихотомин и инервалом усреднения Т, выбираемым о допустимой ошибке измерения дисерсий. Применение системы поиска эйстреума совместно с локальной системой табилизации потока двигателя позволяет при моменте нагрузки типа сухое трение получить в диапазоне скоростей 0,01-50 рад/с максимальный вьаигрыш в среднеквадратичной угловой ошибке в 7-10 раз, в среднеквадратичной ошибке по скорости в 4-5 раз. При датчике с обтюрационнам-сопряжением, диаметрально-противоположных участков растра лимба диапазону скоростей 0,01-50 рад/с соответствуют: максимальная угловая ошибка - в пределах 1-0,1 угл.с., максимальная мгновенная относитель ная ошибка по скорости -.в пределах .0,2-0,001%. Предлагаемая аддитивная фазовая система управления прецизионным электропривбдом может быть использована в имитаторах точных движений для испытания оптико-фотографическо аппаратуры, в стендах для аттестаци датчиков угловых перемещений, угловых скоростей и линейных ускорений, в технологических процессах напыления тонких пленок, в прецизионных металлообрабатывающих станках и в целом ряде других приложений, где требуется получать предельнее динам ческие точности движения механизмов - при изменении в широком диапазоне скорости электропривода или нагрузк Формула изобретения Система управления электроприводом, содержащая последовательно соединенные регулятор тока, ишротноимпульсный преобразователь, двигатель и датчик угла, первый и второй фотоприемники, выходы которых соеди нены с соответствующими первым и вторым формирователями гармонически сигналов, выходы первого формироват ля гармонических сигналов соединены соответственно с первым и вторым . входами первого фазового дискриминатора, третьи и четвертые входы которого соединены с соответствующими выходами задающего генератора, первый выход- первого фазового дискриминатора соединен с первым входом регулятора положения, второй выход - с первым входом частотного дискриминатора, а третий вход - со вторым входом частотного дискриминатора, второй выход двигателя соединен со вторым входом регулятора тока, о т л ичающаяся тем, что, с целью повышения точности системы, она содержит последовательно соединенные . нелинейный блок и ключ и последовательно соединенные второй фазовый дискриминатор, блок вычисления дисперсии, блок поиска минимума дисперсии и блок управления, выход которого соединен со вторым входом блока вычисления дисперсии, а через блок поиска минимума дисперсии со вторым входом регулятора положения, первый вход которого соединен с третьим входом блока вычисления дисперсии/ выход частотного дискриминатора соединен со входом нелинейного блокапервый выход которого соединен с третьим входом регулятора положения, а второй выход - с третьим входом . регулятора тока, выход регулятора положения - через ключ соединён с первым входом регулятора тока, первый и.второй выходы второго формирователя гармонических сигналов соединены с соответствующими входами второго фазового дискриминатора, третий и четвертый входы которого соединены соответственно с первым и вторым выход ai/ш задающего генератора. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1513445, кЛ. G 05 В 13/00, опублик. 1974 (прототип).
1, 2В
15
15
11.
/7
Offl
3i
iiU,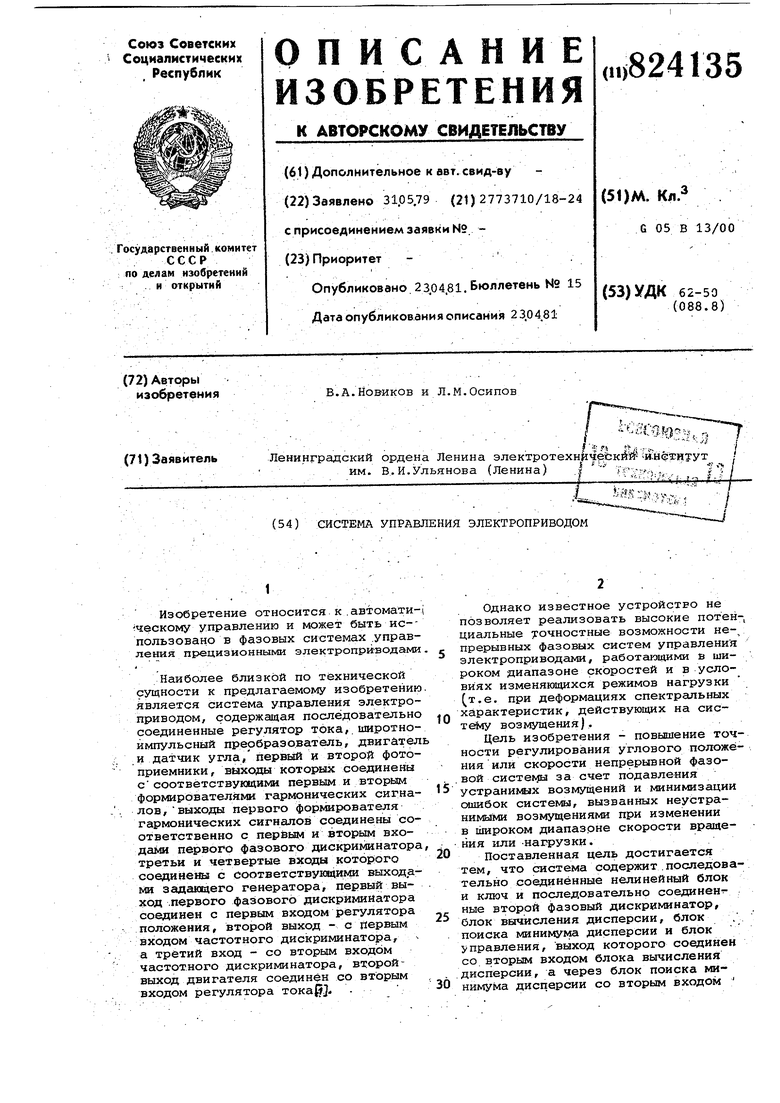




фиг. i
Фаг.5
Фаг.
I ЧтЛс tSt
