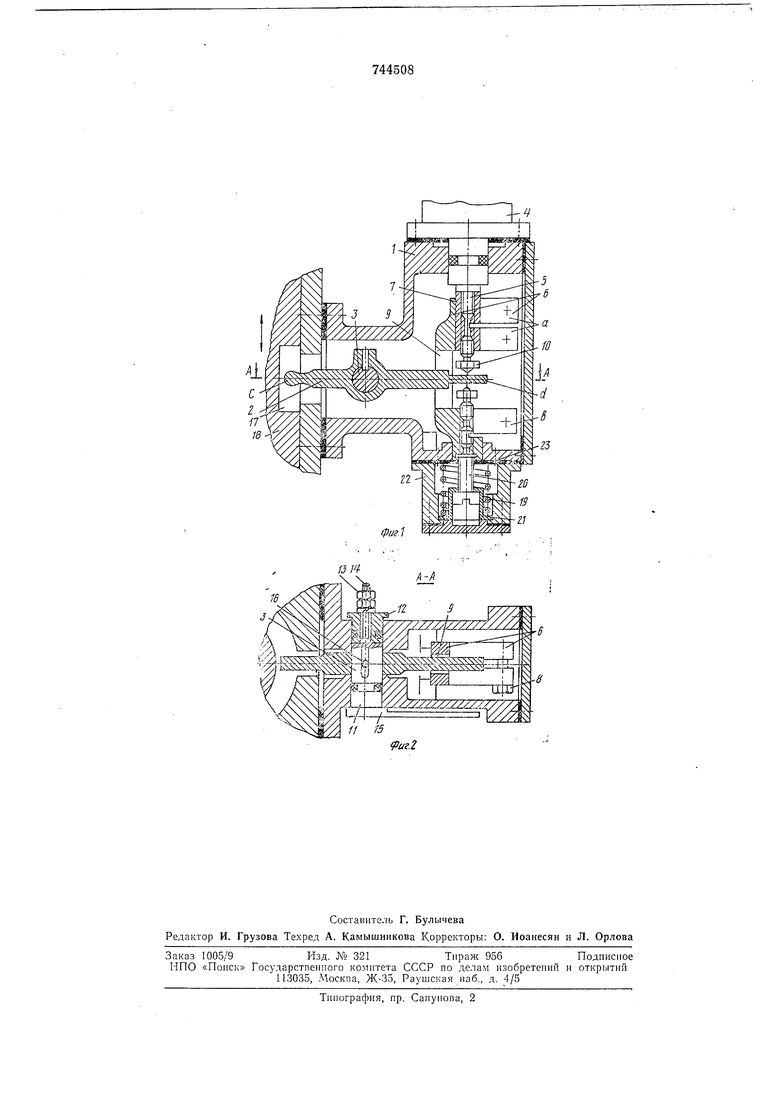
Эта цель достигается тем, что узел регулировки выполнен в виде П-образной скобы с регулировочными винтами, закрепленной на штоке датчика, а в поршне привода сделан паз, в котором размещеп один конец двуплечего рычага, другой конец которого расположен между регулировочными винтами. На фиг.1 изображен продольный разрез предлагаемого сигнализатора; на фиг. 2 - его поперечный разрез А-А па фиг. 1. Сигнализатор конечных положений содержит корпус 1. Узел передачи усилий выполнен в виде рычага 2 и закреплен внутри корпуса 1 при помош,и оси 3. Датчик 4 положений закреплен на корпусе 1 и содержит шток 5. Узел регулировки выполнен в виде П-образной скобы 6 и закреплен на штоке 5 датчика при помощи резьбовой втулки 7, которая зажата в боковой стороне а узла регулировки при помощи стопорных винтов 8. Прорезь 9 в узле регулировки предназначена для пропускания поворотного рычага 2. Регулировочные винты 10 ввернуты: один - во втулку 7, а второй- в боковую сторону b П-образной скобы, положение которых фиксируется после регулировки срабатывания датчика при помощи стопорных винтов 8. Регулировочные винты 10 под воздействием конца d поворотного рычага 2 обеспечивают возвратнопоступательное перемещение скобы 6 вместе со штоком датчика 5 на величину, достаточную для срабатывания датчика 4. Поворотная ось 3 состоит из частей 11 и 12, соединенных между собой при помощи гаек 13, и шпильки 14. (Ось 3 выполнена сборной для удобства сборки и обеспечеиия герметичности, но она может быть неразборной). Часть оси 11 выполнена заодно с визуальным указателем 15. Штифт 16 жестко крепит рычаг 2 на оси 3, исключая поворот одного относительно другого, и обеспечивает совместную работу рычага 2 и визуального указателя 15. Один конец d рычага, передающий перемещение на шток датчика 5, помещен между регулировочными, винтами 10, а другой конец с рычага - в паз 17 привода 18. Длина паза выбирается в соответствии с длиной хода привода. Паз 17 привода 18 может быть продольным, кольцевым или в виде П-образной скобы. Пружина 19 закреплена на корпусе 1 при помощи винта 20, ввернутого в узел регулировки, тарелки 21, крышки 22 и шайбы 23. Сигнализатор конечных положений работает следующим образом. При промежуточном положении силового привода 18 рычаг 2 под воздействием пружины 19 занимает положение, соответствующее изображенному на фиг. 1. При перемещении силового привода 18 в одно из крайних положений конец с рычага 2 под действием привода перемещается, в результате чего рычаг 2 поворачивается на угол, достаточный для перемещения вторым концом d рычага через регулировочные винты 10 узла регулировки со штоком датчика 5 на величину, обеспечивающую срабатывание датчика 4. При этом пружина 19 сжимается, а визуальный указатель 15, жестко соединенный с рычагом 2, поворачивается и визуально показывает положение привода. При возвращении привода в промежуточное положение рычаг 2 под действием пружины 19 возвращается в положение, изображенное на фиг. 1. Конструкция сигнализатора позволяет упростить присоединение сигнализаторов к приводам, уменьшить габариты приводов, применять сигнализаторы па приводах, независимо от величины перемещения привоA унифицировать сигнализаторы и упростить производство при их серийном изготовлении в блочном исполнении. Унификация сигнализатора состоит в том, что он может быть использован при любых заданных перемещениях привода, т. е. для любой величины регулирования без переделки его деталей, Формула изобретеиия Сигнализатор конечных положений, содержащий датчик положения, узел регулировки, узел передачи усилия, вынолнепный в виде двуплечего рычага, н привод, отличающийся, тем, что, с целью расширения области применения путем расширения диапазона перемещений привода, в нем узел регулировки выполнен в виде П-образной скобы с регулировочными винтами, закрепленной на щтоке датчика, а в поршне привода выполнен паз, в котором размещен один конец двуплечего рычага, другой конец которого расположеп между регулировочными винтами. Источники информации, иринятые во внимание при экспертиз 1.Авторское свидетельство СССР № 408094, кл. F 16 К 31/00, 1973. 2.Указатель механизма реле осевого сдвига турбины. - В кн. Б. Н. Бежанова «Пневматические системы автоматизации технологических процессов. Машгиз, 1963, с. 278, фиг. 138. 3.Сигнализатор конечных положений с приводом - Каталог справочник «Дистанционно-управляемые и автоматические исполнительные механизмы корабельных и судовых систем и трубопроводов. Л., «Судостроение, 1970, с. 136-137, Дистаиционно-управляемый запорный исполнительный механизм с сильфоном угловой штуцерный (ирототип).
131
А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи полосового и ленточного материала в зону обработки | 1981 |
|
SU1013054A1 |
| Упор для вырубному штампу | 1977 |
|
SU710734A1 |
| Автоматический выключатель | 1987 |
|
SU1495873A1 |
| Электрический переключатель | 1989 |
|
SU1723594A1 |
| Станок для изготовления электрических катушек | 1985 |
|
SU1348921A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Сигнализатор конечного положения подвижного элемента | 1986 |
|
SU1374212A1 |
| Устройство для подачи полосового и ленточного материала в зону обработки | 1981 |
|
SU958020A1 |
| Секатор-сучкорез и режущий орган секатора | 1986 |
|
SU1604243A1 |