1
Изобретение относится к областипрокатного производства, а точнее к вспомогательному оборудованию трубных цехов, и касается летучих пил, у которых каретки с режущими инструментами перемещаются возвратно-поступателЬно по направляющим соосно с трубой.
. Известны приводы каретки летучей пилы трубосварочного стана, содержащие рабочий пневмоцилиндр, связанный с несущей ножи кареткой, пневмоцилиндр дляразгона каретки, установленный с противоположной стороны каретки соосно рабочему пневмоцилиндру, устройство синхронизации скорости каретки со 15 скоростью трубы и систему управ-., ления 1.
Основным недостатком таких приводов является отсутствие автоматической синхронизации скорости перемещения20 каретки со скоростью движущейся трубы в случае изменения этой скорости по технологическим причинам на участке подготовки штрипса, формовки, свайки, а такжепри iiycke и остановке стайа. 25
ЦельЕО настоящего изобретения является повышение надежности привода и пилы,а также повышение скорости и точности порезки труб на мерные длины.
Поставленная цель достигается тем, 30
что на входе в рабочий пневмоцилиндр и в пневмоцилиндр для разгона каретки установлены приводимые вовращение от электродвигателей бесступенчатые центробежные регуляторы, и устройство синхронизации выполнено в виде управляющих электродвигателя и1И тахогенераторов.
Для пояснения изобретения ниже приводится конкретный пример выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
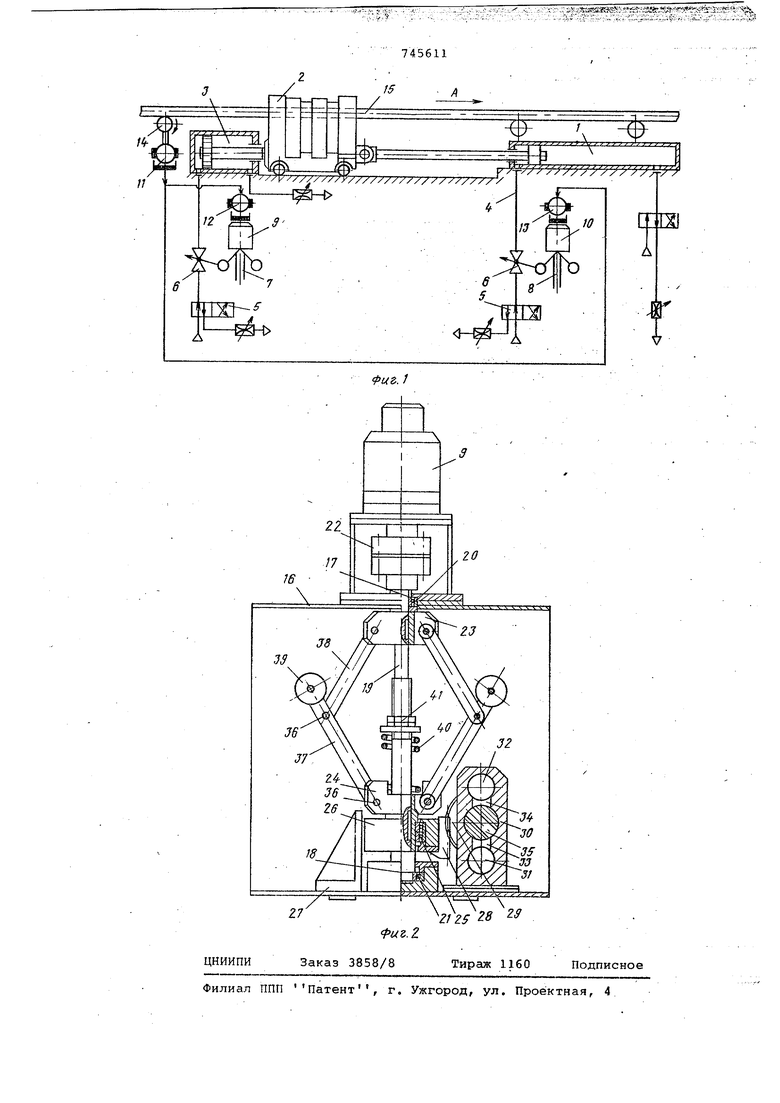
фиг. 1 изображает схематично привод каретки летучей пилы;
.фиг. 2 - бесступенчатый центробежный регулятор и его кинематическую связь с двигателем и устройством для регулирования подачи воздуха в пневмоцилиндры с частичным-разрезом.
Привод каретки летучей пилы содержит длинноходовой рабочий пневмоцилиндр 1, соединенный с кареткой 2, несущей ножи (не показаны) пневмоцилиндр 3 для разгона каретки 2, установленный с противоположной стороны каретки 2 соосно рабочему пневмоци индру 1.
в пневмоцилиндры 1 и 3 давление дередают по трубопроводам .4 через РЭП 5. На входе в пневмоцилиндры 1 И 3 установлены дополнительные устройства для регулирования подачи во духа, например краны б, и бесступен чатые центробежные регуляторы 7 и 8 приводимые,во вращение от электро-г двигателей 9 и 10. Электродвигатели 9 и 10 бесступенчатых центробежных регуляторов 7 и .8 синхронно работают посредством тахогенераторов 11, 12, 13,связанных с вращаклдимся роликом 14,контактирующим с движущейся трубой 15, Бесступенчатый Центробежный регу лятор 7, как и регулятор 8, состоит из корпуса 16 d расточками 17 и 18, вертикального вала 19, смонтированного в подшипниках 20 и 21, муфты 2i, соединяющей вал 19 с электродвигателем 9 и 10, На валу 19 установле ны неподвижно цапфа 23 и подвижно вдоль оси вала 19 цапфа 24, На конце цапфы 24, посредством подшипников 25, установлена муфта 26 с возможностью перемещения вдоль вала 19 вмест с цапфой 24 без вращения вокруг вала. 19 от связи с направляющей 27. На корпусе муфты 26 жестко закреплена рейка 28, находящаяся в зацеплении с зубчатым сектором 29, установлен. ным на оси пробки 30 в кране 6. В кране б имеются входное 31 и выходное 32 отверстия трубопровода 4 и соединительные каналы 33 и 34, а в пробке 30 имеется калиброванное отверстие 35, соединяющее эти каналы полностью или частично. Неподвижная цапфа 23 и подвижная цапфа 24 связаны посредством шарниров 36 стержнями 37 и 38. На двух стержнях 37 установлены грузы 39. Подъем подвижной цапфы 24 вследствие центробежных сил грузов 39 регулируется пружиной 40, установленной на валу 19 и поджатой гайкой 41. Устройство работает следующим образом, В исходном положении каретка 2 находится в крайнем левом положении Шток пневмоцилиндра 3 для разгона каретки 2 находится в полости цилиндра, а шток рабочего пневмоцилиндра 1 выдвинут. Труба 15 стоит неподвижно, ролик 14 взаимодействующий с ней, неподвиже тахогенераторы 11-13 с двигателями 9 10 остановлены. Цапфа 24 с муфтой 26 и рейкой 28 находятся в нижнем положении. Пробка 30 перекрыла каналы 34 и 33 трубопровода 4 или установлена kXaK, чтобы было возможно управлять вручную перемещением каретки 2 при наименьшем проходном сечении трубопровода 4, При пуске трубосварочного стана труба 15с ускорением начинает перемещаться в направлении стрелки А, приводит во вращение контактирующий с ней ролик 14, тахогенераторы 11, 12, 13, электродвигатели 9 и 10, син хронно со скоростью движения трубы. Бесступенчатые центробежные регуляторы 7 и 8 приводятся во вращение, центробежные силы грузов 39 стержней 37 и 38 разводят систему рычагов регулятора и поднимают цапфу 24 и муфty 26. От подъема муфта 26,.рейка 28, поднимаясь с муфтой 26, поворачивает сектор 29 и сидящую на одной оси с ним пробку 30. Пробка 30 калиброванным отверстием 35 соединяет каналы 33 и 34 воздухопровода 4 в такой мере, чтобы скорость движения штока рабочего пневмоцилиндра была равна скорости движения трубы, а скорость штока цилиндра 3 пропорционально больше. Это достигается первоначальной регулировкой усилия пружины 40 посредством вращения гайки 41. Таким образом краны 6 воздухопроводов 4 настроены на поступление воздуха в цилиндры соответственно скорости движения трубы. При изменении скорости движения трубы соответственно меняется скорость бесступенчатого регулятора и объем поступающего воздуха в пневмоцилиндры. При получении сигнала на начало реза посредством РЭП 5 подается воздух заданного объема в пневмоцилиндры 1 и 3,происходит разгон каретки 2, несущей режущие ножи,до скорости движения трубы.В результате врезание ножей происходит плавно без ударов, После окончания реза по команде датчика, установленного на каретке, каретка 2 возвращается в исходное положение посредством рабочего пневмоцилиндра. При подходе каретки в исходное положение шток пневмоцилиндра 3 тормозит движение каретки за счет избыточного давления в поршневой полости. В дальнейшем цикл повторяется. Формула изобретения Привод каретки летучей пилы трубосварочного стана, содержащий рабочий пневмоцилиндр, связанный с несущей ножи кареткой, пневмоцилиндр для разгона каретки, установленный с противоположной стороны каретки соосно рабочему пневмоцилиндру, устройство синхронизации скорости каретки со скоростью трубы и систему управления, отличающийся тем, что, с целью повышения надежности привода и пилы, а также повышения скорости и точности порезки труб на мерные длины, на входе в рабочий пневмоцилиндр и в пневмоцилиндр для разгона каретки установлены приводимые во вращение от электродвигателей бесступенчатые центробежные регуляторы, а устройство синхронизации выполнено в виде управляющих электродвигателями тахогенераторов. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 541609, кл, В 23 D 45/20, 1976,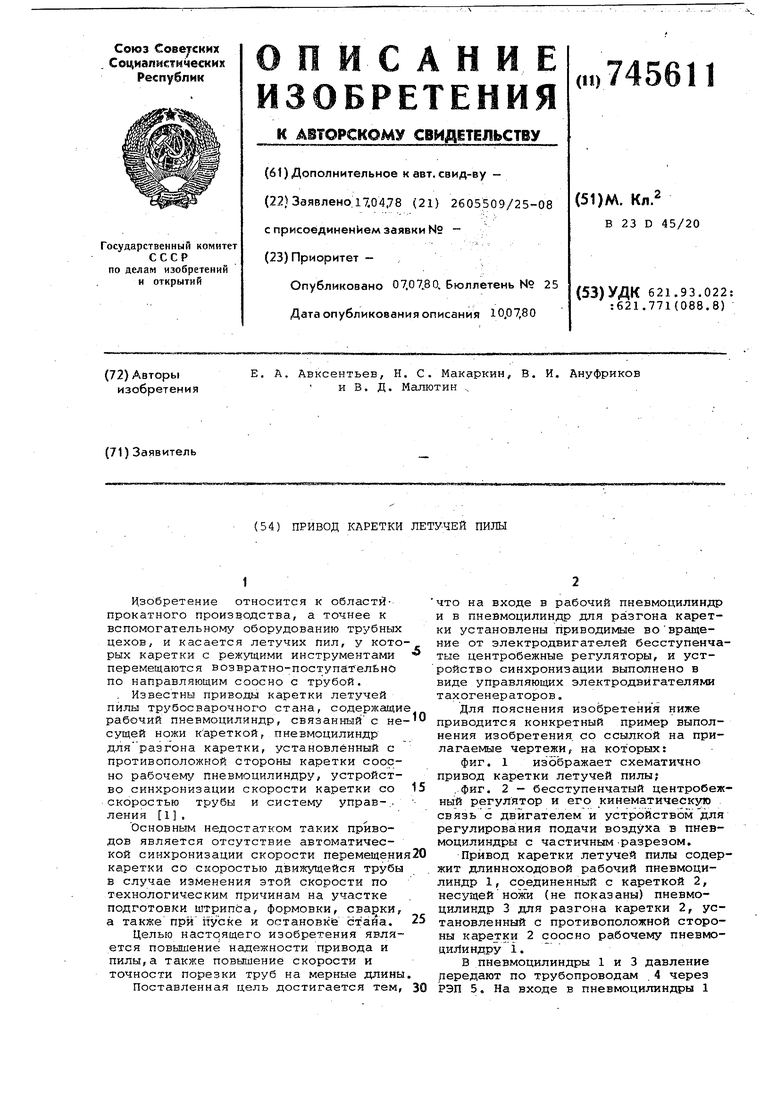
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод каретки летучей пилы | 1979 |
|
SU837632A1 |
| Привод каретки летучей пилы | 1975 |
|
SU541603A1 |
| Привод каретки | 1975 |
|
SU566029A1 |
| ЛЕТУЧИЕ НОЖНИЦЫ | 1978 |
|
SU866883A1 |
| ЛЕТУЧАЯ ПИЛА ДЛЯ РЕЗКИ ДВИЖУЩЕГОСЯ ПРОКАТА | 1997 |
|
RU2167747C2 |
| СПОСОБ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ СВАРНЫХ ПРЯМОШОВНЫХ ТРУБ НА МЕРНЫЕ ДЛИНЫ И ЛЕТУЧАЯ ЗУБЧАТАЯ ДИСКОВАЯ ПИЛА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550065C2 |
| Летучая пила для резки профилей на мерные длины | 1970 |
|
SU376998A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ ТРУБ | 1992 |
|
RU2056981C1 |
| Станок для резки движущихся труб | 1982 |
|
SU1038115A1 |
| Летучий станок для резки труб | 1981 |
|
SU996112A1 |