(54) .ПРИВОД КАРЕТКИ ЛЕТУЧЕЙ ПИЛЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод каретки летучей пилы | 1975 |
|
SU541603A1 |
| Привод каретки летучей пилы | 1978 |
|
SU745611A1 |
| Привод каретки | 1975 |
|
SU566029A1 |
| СТАНОК ШИПОРЕЗНЫЙ | 2002 |
|
RU2221693C1 |
| ЛЕТУЧАЯ ПИЛА ДЛЯ РЕЗКИ ДВИЖУЩЕГОСЯ ПРОКАТА | 1997 |
|
RU2167747C2 |
| СТАНОК ШИПОРЕЗНЫЙ | 2002 |
|
RU2200087C1 |
| Устройство для подачи и точного останова хлыстов раскряжовочной установки | 1980 |
|
SU919867A1 |
| Летучая пила для резки профилей на мерные длины | 1970 |
|
SU376998A1 |
| ЛЕТУЧИЕ НОЖНИЦЫ | 1978 |
|
SU866883A1 |
| Летучий станок для резки труб | 1981 |
|
SU996112A1 |
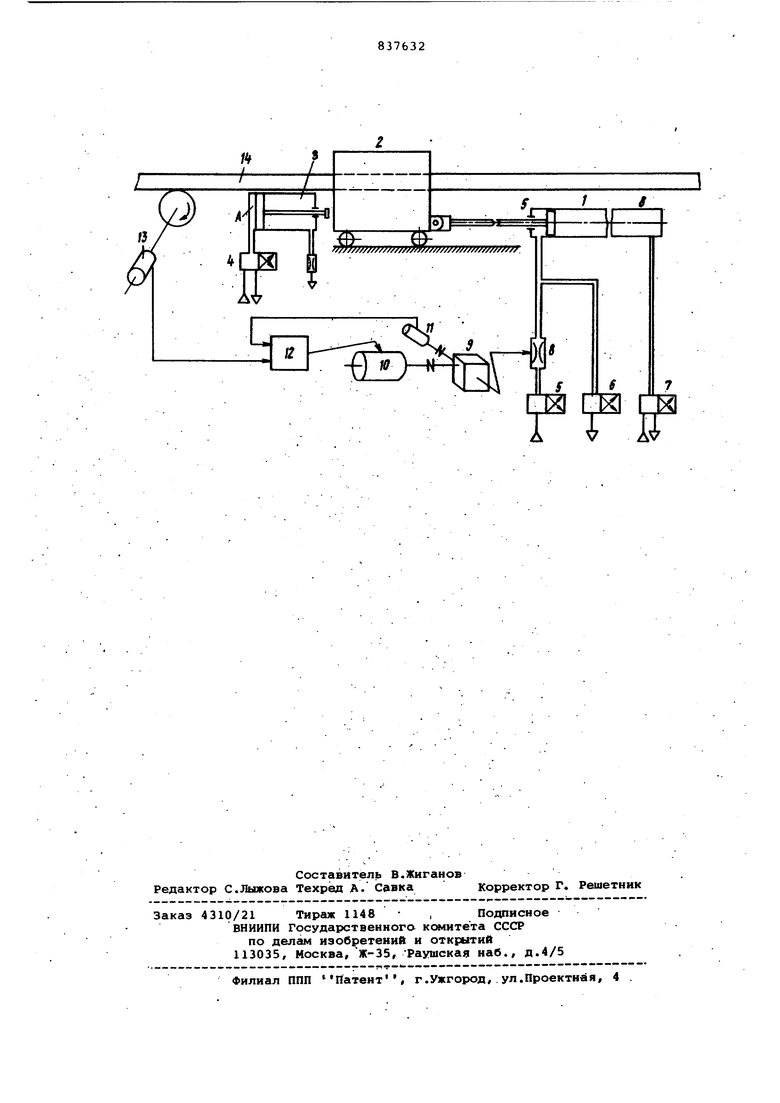
Изобретение относится к прокат.ному производству, в частности к вспомогательному оборудованию трубных цехов, и касается усовершенствования привода с пневматическим и гидравлическим механизмом для перемещения рабочего органа. Известен привод каретки летучей пилы, содержащий силовой пневмоцилиндр, связанный с несущей ножи кареткой, пневмотолкатель для разгона каретки и систему управления распределителями подачи воздуха. На входе в рабочий пневмоцилиндр и в пневмотолкатель установлены приводимые во вращение от электродвигателей бессту пенчатые центробежные регуляторы, на один из входов каждого из которых подается задание от датчика скорост трубы 1. Большая инерционность центробежных регуляторов вызывает необходимость для быстродействия применения электродвигателей большой мощности и постоянной работы электродвигател (даже когда подача остается неизмен емой) . Кроме того, наличие центробе ных регуляторов значительно усложня конструкцию привода и обслуживание летучей пилы. Эти недостатки ограни чивают область применения данной летучей пилы в трубосварочных агрегатах с необходимыми диапазонами изменения скорости сварки 1:3. Цель изобретения - повышение быстродействия пилы иупрощение кокструк.ции. Поставленная цель достигается тем, что в приводе каретки летучей пилы, содержащем силовой пневмоцилиндр, связанный с несущей ножи кареткой, пневмотолкатель для разгона каретки, регулятор подачи воздуха в силовой пневмоцилиндр с злектроприводом и суммирующим усилителем, на один из входов которого подается задание от датчика скорости трубы, и систему управления распределителями подачи воздуха, регулятор подачи воздуха непосредственно связан с электроприводом и снабжен датчиком перемещения, выход которого соединен со вторым входом суммирующего усилителя, питсцощего электропривод. На чертеже изображен схематично привод каретки летучей пилы. Привод каретки летучей пилы содержит силовой пневмоцилиндр 1, соединенный с кареткой 2, несущей ножи (на чертеже не показаны), и пневмотолкатель 3 для ускоренного разгона каретки 2, установленный с противоположной стороны каретки 2. Давление в пневмоцилиндры 1 и 3 подают по трубопроводам через электропневматические распределители подачи воздуха (РЭП) 4-7. На входе в пневмоцилиндр 1 .установлен регулятор подачи воздуха, например дроссель 8, непосредственно связанный с электроприводом, включающим самотормозящий редуктор 9 и электродвигатель 10.
Регулятор подачи воздуха снабжен датчиком 11 перемещения, выход которого соединен с одним из входов питающего электропривод суммирующего усилителя 12, на второй вход которого подается задание От датчика 13 скорости трубы 14.. .
Устройство работает следующим образом.
Исходное положение каретки 2 крайнее левое, при этом шток пневмоцилиндра 1 выдвинут, а щток пневмотолкателя 3 утоплен. Труба 14 неподвижна, сигнал на выходе датчика 13 скорости трубы 14 равен нулю, дроссель -8 в исходном положении, двигатель 10 неподвижен. При этом распределитель 4 в положении, когда полост А пневмотолкателя 3 соединена с ат-. мосферой; распределитель 5 в положении, когда дроссель 8 отсечен от сети сжатого воздуха; распределители 6 и 7 в положении, когда обе полости пневмоцилиндра 1 соединены с атмосферой .
При движении трубы 14 на выходе датчика 13 скорости появляется сигна пропорциональный скорости трубы 14. Сигнал этот подается на вход суммирующего усилителя 12 и на выходе его появляется напряжение, поступающее на двигатель 10. Последний, вращаясь открывает дроссель 8 до тех пор, пока напряжение на выхЪде датчика 11 перемещения не уравновесит напряжени с датчика 13 скорости, после ч&го двигатель 10 остановится. При изменении скорости трубы сигнал с датчика 13 изменяется и это приводит к повороту электродвигателя 10 в новое положение, когда сигнал датчика 11 уравновешивает сигнал датчика 13. При подаче , команды на рез распределитель 4 переключается в положение, когда полость А пневмотолкателя 3 соединяется с сетью сжатого воздуха, распределитель 5 переключается в положение, когда дроссель 8 подсоединяется к сети сжатого воздуха, распределитель б перекрывает соединение полости Б пневмоцилиндра 1 с атмосферой, а распределитель 7 остается в прежнем положении, когда полость В пневмоцилиндра 1 соединена с атмосферой. Под совместным действием цилиндра 1 и толкателя 3 каретка быстро разгоняется. После того, как каретка 2 отрывается, от толкателя 3, дается команда на сближение режущих ножей. Внедрение ножей в трубу 14 обеспечивает синхронное перемещение каретки 2с трубой 14 до конца реза.
Действие регулятора 8 подачи воздуха при этом заключается в том,что обеспечивается минимальное осевое усилие на ножи, так как положение дросселя 8 постоянно соответствует скорости трубы 14. В конце хода каретки 2 вперед дается команда на разведение ножей, а затем на возврат каретки 2 в исходное положение.Для этого распределитель 5 отсекает дроссель 8 от сети сжатого воздуха, распределитель 6 соединяет полость Б пневмоцилиндра 1 с атмосферой, распределитель 7 подает сжатый воздух в полость В пневмоцилиндра 1. При подходе каретки 2 к толкателю 3 она воздействует на шток последнего. Одновременно дается команда на переключение распределителя 4 в положение, когда полость А соединяется с атмосферой. Возросшее сопротивление замедляет каретку и в конце хода занимает исходное положение, после чего дается команда на переключение распределителя 7 и положение вьтуска воздуха из полости В цилиндра 1.
В дальнейшем привод каретки летучей пилы по сравнению с известными позволяет повысить быстродействие пилы, а тем самым, повысить производительность трубосварочного агрегата в составе которого она применяется.
Формула изобретения
Привод каретки летучей пилы,содержащий силовой пневмоцилиндр, связанный с несущей ножи кареткой, пневмотолкатель для разгона каретки, регулятор-подачи воздуха в силовой пневмоцилиндр с электроприводом и суммирующим усилителем с двумя входами/ на один из которых подается задание от датчика скорости трубы, и систему управления распределителями подачи воздуха,, отличающийся тем, что, с целью повышения быстродействия пилы и упрощения конструкции, регулятор подачи воздуха непосредственно связан с электроприводом 5 и снабжен датчиком перемещения, выход которого соединен со вторым входом суммирующего усилителя, питающего электропривод.
0 Источники информации,
принятые во внимание при экспертизе
