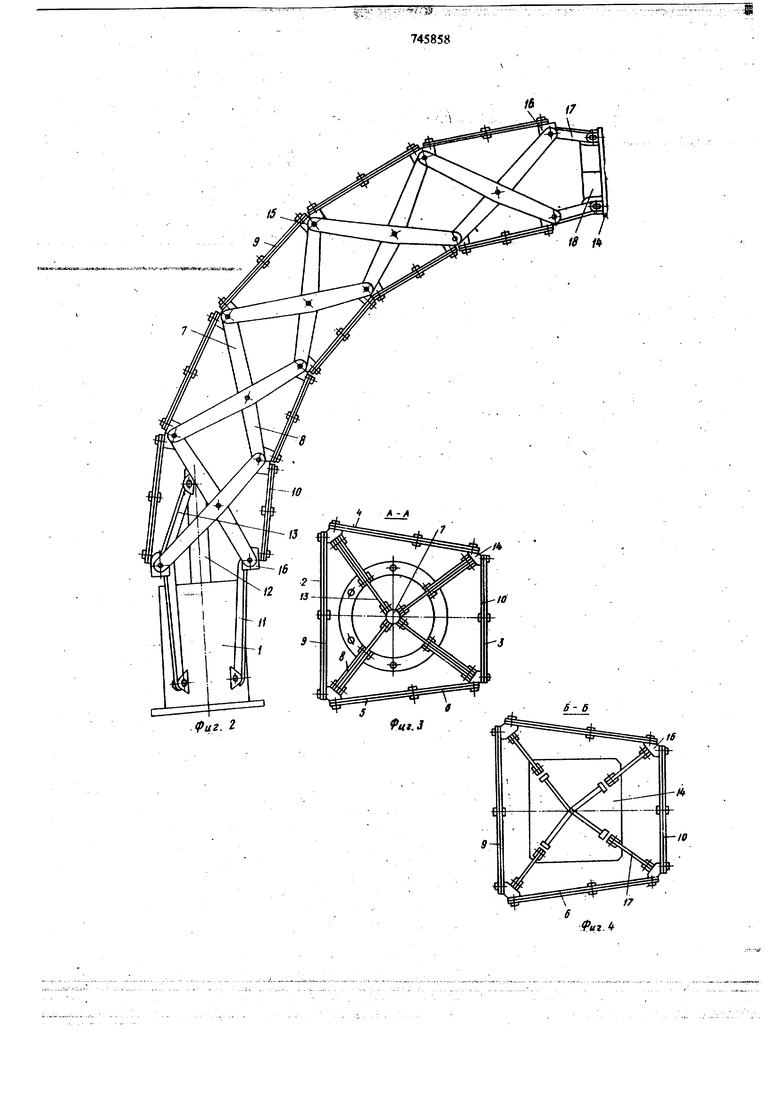
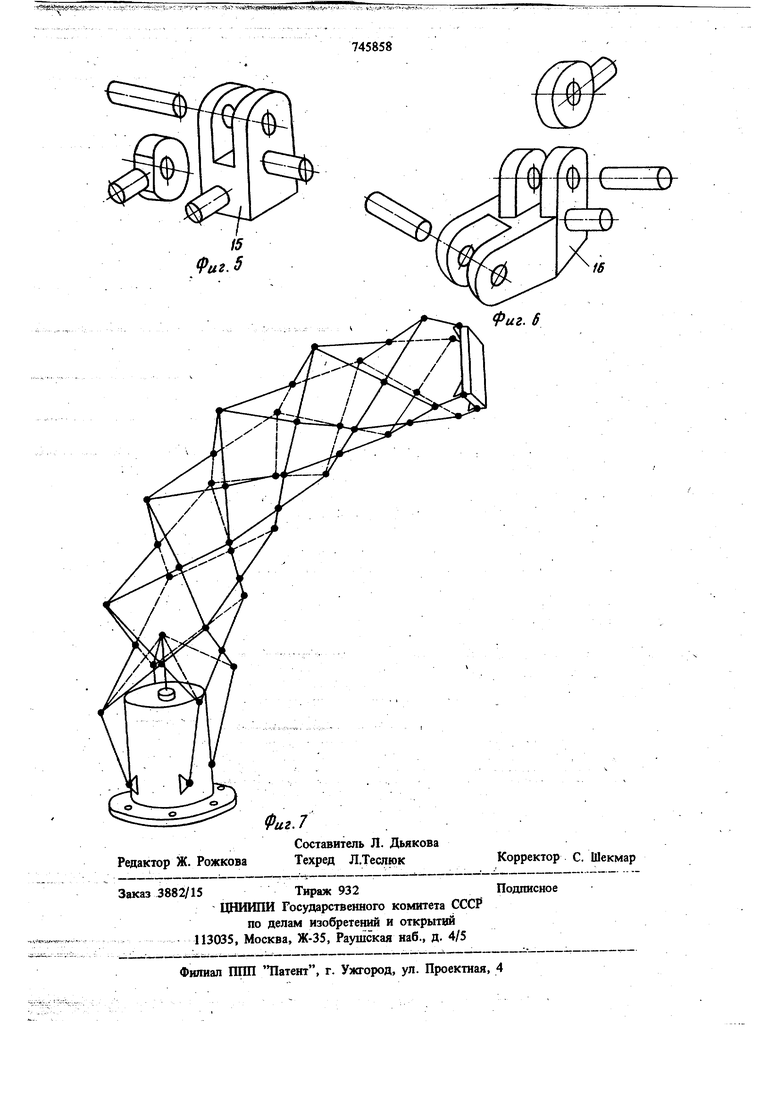
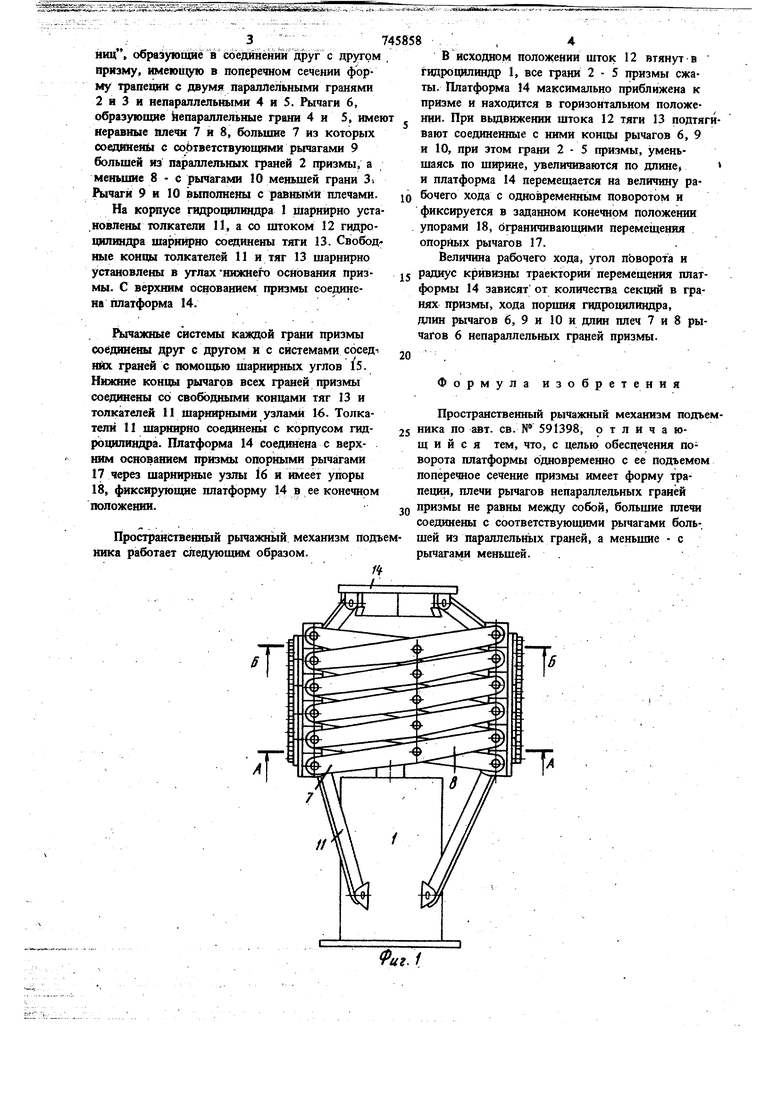
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в качестве транспортного устройства для перевозки и установки столбов телефонно-телеграфных сетей, подвозки и подачи насосно-компрессорных труб для спуска их в скважину, а также в виде стационарных установок для подачи бурильных и обсадных труб при спуске их в скважину. По основному авт. св. N 591398 известен пространственный рычажный механизм подъемника, содержащий системы шарнирно соединен ных рычагов типа нюрнбергских ножниц, расположенные в виде призмы, установленную на вершине прнзмы платформу, привод, выпол ненный в виде гидроцилиндра, на корпусе которого шарннрно установлены толкатели, расположенные по диагоналям поперечного сечени призмы, а на штоке соответственно расположешпо толкателей установлены тягн, которые своими свободными концами сочленены со свободными концами толкателей и с нижним концами рычагов механизма. Данный механизм обеспечивает только.прямолинейное перемещение платформы, но не обеспечивает ее поворота, что сужает область использования его. Целью изобретения является обеспечение возможности поворота платформы одновременно с ее подъемом. Указанная цель достигается тем, что поперечное сечение призмы имеет форму трапеции, плечи рычагов непараллельных граней призмы не равны между собой, большие плечи соединены с соответствующими рычагами большей из параллельных граней, а меньшие - с рычагами меньшей. На фиг. 1 изображен предлагаемый меу низм в исходном положении, ввд спереди; :на фиг. 2 - то же, в конечном положении; на фиг. 3 - разрез А-А фиг. 1; на фиг. 4 разрез Б-Б ; фиг. 1; нафет. 5, б - шарнирные узлы соединений; на фиг. 7 - рычажный механизм в аксонометрии. Пространственный рычажный меха1шзм подъемника содержит гидроцшшндр 1, шарнирно-рычажные системы типа нюрнбергских ножниц, обраэуюШе в соединении друг с другом призму, имеюи ую в поперечном сечении форму трапеции с двумя параллельными гранями 2 и 3 и непараллельными 4 и 5. Рычаги 6, образующие Непараллельные грани 4 и 5, име неравные плечи 7 и 8, большие 7 из которых ооештены с соЬтветствующими рь(чагами 9 большей из параллельных граней 2 призмы, а меньшие 8 - с рычагами 10 меньшей грани 3-. Рычаги 9 и 10 вьшолнены с равнБн й плечами. На корпусе пздроцилиндра 1 шарнирно уста .новлены толкатели 11, а со штоком 12 гидроцилннщ а шарнирно соединены тяги 13. Свобод ные концы толкателей 11 и тяг 13 шарнирно установлены в углахнижнего основания призмы. С верхним основанием призмы соединена платформа 14. РЬпажные системы каждой грани призмы соединены друг с другом и с системами сосед них граней с помошью шарнирных углов 15. Нижние концы рычагов всех граней призмы соединены со свободньпми концами тяг 13 и толкателей 11 шарнирными узлами 16. Толкатели 11 шарнирно соединены с корпусом пздроцилиндра. Платформа 14 соединена с верхним основанием призмы опорными рычагами 17 через шарнирные узлы 16 и имеет упоры 18, фиксируюшие платформу 14 в ее конечном положении. Простран(;твенный рычажный механизм под ника работает следующим образом. В ИСХОДНОМ положении шток 12 втянут в гидроцилшздр 1, все грани 2 - 5 призмы сжаты. Платформа 14 максимально приближена к призме и находится в горизонтальном положении. При выдвижении штока 12 тяги 13 подтягивают соединенные с ними концы рычагов 6, 9 и 10, при зтом грани 2 - 5 призмы, уменьшаясь по ширине, увеличиваются по длине, и платформа 14 перемещается на величину рабочего хода с одновременным поворотом и фиксируется в заданном конечном положении упорами 18, ограничивающими перемещения опорйых рычагов 17. Величина рабочего хода, угол пЬворота и радиус кривизны траектории перемещения платформы 14 зависят от количества секций в гранях призмы, хода поршня гидроцилиндра, длин рычагов 6, 9 и 10 и длин плеч 7 и 8 рычагов 6 непараллельных граней призмы. Формула изобретения Пространственный рычажный механизм подъемника по авт. св. N 591398, отличающийся тем, что, с целью обеспечения поворота платформы одновременно с ее подъемом поперечное сечение призмы имеет форму трапеции, плечи рычагов непараллельных граней призмы не равны между собой, большне плечи соединены с соответствующими рычагами боль-, шей из параллельнь1х граней, а меньшие - с рычагами меньшей. .
fir -
745858
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный рычажный механизм подъемника | 1976 |
|
SU591398A1 |
| Подъемник Самохвалова | 1983 |
|
SU1194829A1 |
| Подъемник | 1978 |
|
SU695960A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Подъемник | 1987 |
|
SU1430338A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ПОДЪЕМНИК | 2003 |
|
RU2268239C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |