(54) ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ МЕХАНИЗМ ПОДЪЕМНИКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный рычажный механизм подъемника | 1978 |
|
SU745858A1 |
| Подъемник | 1978 |
|
SU695960A1 |
| Подъемник Самохвалова | 1983 |
|
SU1194829A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2268239C2 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |
| Подъемник | 1987 |
|
SU1430338A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
Изобретение относится к грузоподъемным механизмам с большим рабочим ходом и может быть использовано в подъемных и транспортирующих устройствах в качестве подъемной мачты на транспортной- базе.
Известны пространственные рычажные механизмы, содержащие систему шарнирно соединенных рычагов типа «нюрнбергских ножниц , расположенных в виде призмы, и привод 1.
Однако указанные рычажные механизмы не .обеспечивают достаточной поперечной жесткости при больщом ходе и их функциональные возможности ограничены.
Цель изобретения - расширение функциональных возможностей механизма и повыщение его устойчивости.
Указанная цель достигается тe, что механизм снабжен гидравлическим цилиндром для привода рычагов, на корпусе которого шарнирно смонтированы толкатели, расположенные по диагоналям поперечного сечения призмы, а на штоке соответственно расположению толкателей шарнирно установлены тяги, при этом тяги и толкатели своими свободными концами сочленены между собой и с нижними концами рычагов механизма.
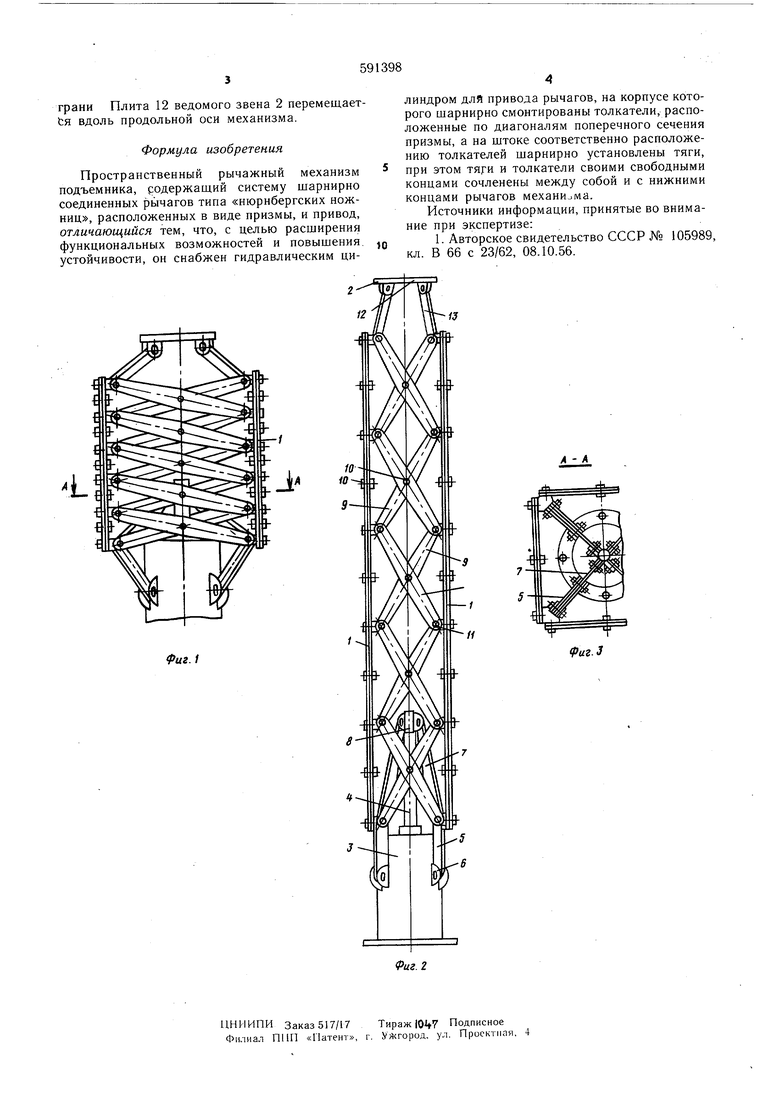
На фиг. 1 изображен общий видмеханизма в исходном положении; на фиг. 2 - то же, в выдвинутом положении; на фиг. 3-разрез А-А фиг. 1.
Механизм состоит из привода, боковых граней и ведомого узла 2. В качестве привада применен гидравлический иилиндр 3, имеющий поршень со штоком 4. На корпусе цилиндра
3шарнирно смонтированы толкатели 5, установленные в опорах 6, а тяги 7 шарнирно соединены с наконечником 8 штока 4. Толкатели 5 и тяги 7 расположены по диагоналям
поперечного сечения призмы. Боковые грани 1 призмы состоят из рычагов 9 и шарниров 10. Между собой боковые грани соединяются угловыми шарнирами 1. Ведомый узел 2 состоит из плиты 12 и шарнирно соединенных с ней тяг 3.
Пространственный рычажный механизм работает следующим образом.
Б исходном положении механизма Щток
4втянут в цилиндр 3, и боковые грани 1 сжаты по длине. Механизм имеет минимальную высоту. Ведомое звено 2 максимально приближено к приводу. При выдвижении штока 4 тяги 7 перемещают торцы боковых граней 1. Последние уменьшаются по ширине и увеличиваются по длине, перемещая ведомое звено 2 на величину рабочего хода. Величина рабочего хода зависит от количества параллелограммов в боковой
грани Плита 12 ведомого звена 2 перемещаетtH вдоль продольной оси механизма.
Формула изобретения
Пространственный рычажный механизм подъемника, ;одержащий систему шарнирно соединенных рь1чагов типа «нюрнбергских ножниц, расположенных в виде призмы, и привод, отличающийся тем, что, с целью расширения функциональных возможностей и повышения, устойчивости, он снабжен гидравлическим цилиндром для привода рычагов, на корпусе которого шарнирно смонтированы толкатели, расположенные по диагоналям поперечного сечения призмы, а на штоке соответственно расположению толкателей шарнирно установлены тяги, при этом тяги и толкатели своими свободными концами сочленены между собой и с нижними концами рычагов механизма.
Источники информации, принятые во внимание при экспертизе:
ч
А А
