(54) РЕГУЛЯТОР НАТЯЖЕНИЯ НИТЕЙ ОСНОВЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом партионного приготовления основ к ткачеству на сновальной и шлихтовальной машинах | 1980 |
|
SU945630A1 |
| Способ управления разматыванием основных нитей с группы сновальных валиков | 1982 |
|
SU1074919A1 |
| Устройство для регулирования вытяжки основы на шлихтовальной машине | 1983 |
|
SU1100338A1 |
| Стойка сновального валика шлихтовальной машины | 1990 |
|
SU1737041A1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ НИТЕЙ К МАШИНАМ ТКАЦКОГО ПРОИЗВОДСТВА | 1971 |
|
SU318415A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТКАЦКИХ НАВОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061807C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТКАЦКИХ НАВОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278913C2 |
| Способ формирования ткацких навоев | 1977 |
|
SU690094A1 |
| Стойка сновального валика шлихтовальной машины | 1986 |
|
SU1335588A1 |
| Устройство для регулирования натяжения основы | 1986 |
|
SU1341280A1 |
1
Изобретение относится к области автоматических устройств для регулирования натяжения и может быть применено на шлихтовальных машинах и других машинах текстильного производства, где требуется поддержание натяжения материала при его сматывании с навоев, рулонов или катушек.
Известен регулятор натяжения нитей основы при сматывании их со сновальных, валиков на шлихтовальных машинах, содержаший в качестве тормозного устройства колодочный тормоз, управляемый от датчика натяжения 1.
Недостатком такого регулятора является громоздкость конструкции, что ограничивает возможности установки его на машинах, где смотка основы производится одновременно с нескольких навоев или катушек.
Известен также регулятор натяжения нитей основы, содержаш,ий датчик текущего диаметра основы, сматываемой со сновального валика, подключенный на вход преобразователя, выход которого посредством исполнительного механизма связан с тормозным устройством, выполненным в виде ленточного тормоза, врздействуюшего на тормознь1е шкивы 2.
Недостатком такого регулятора является влияние изменения коэффициента трения в тормозном устройстве на точность регулирования натяжения основы.
Целью изобретения является повышение точности регулирования.
Указанная цель достигается за счет того, что тормозное устройство включает гибкий элемент с пружинами, платформу, кинематически связанную с исполнительным механизмом, и датчик контроля разности вы10тяжек пружин, при этом датчики текущего диаметра основы и контроля разности вытяжек пружин снабжены сельсинами, гибкий элемент пружинами присоединен к платформе, датчик контроля разности вытяжек пружин выполнен в виде рычага, один ко15нец которого шарнирно связан с одним концом гибкого элемента, а второй закреплен на валу сельсина датчика контроля разности вытяжек пружин, жестко установленного на втором конце гибкого элемента, причем выходы сельсинов подключены к соответствующим входам преобразователя.
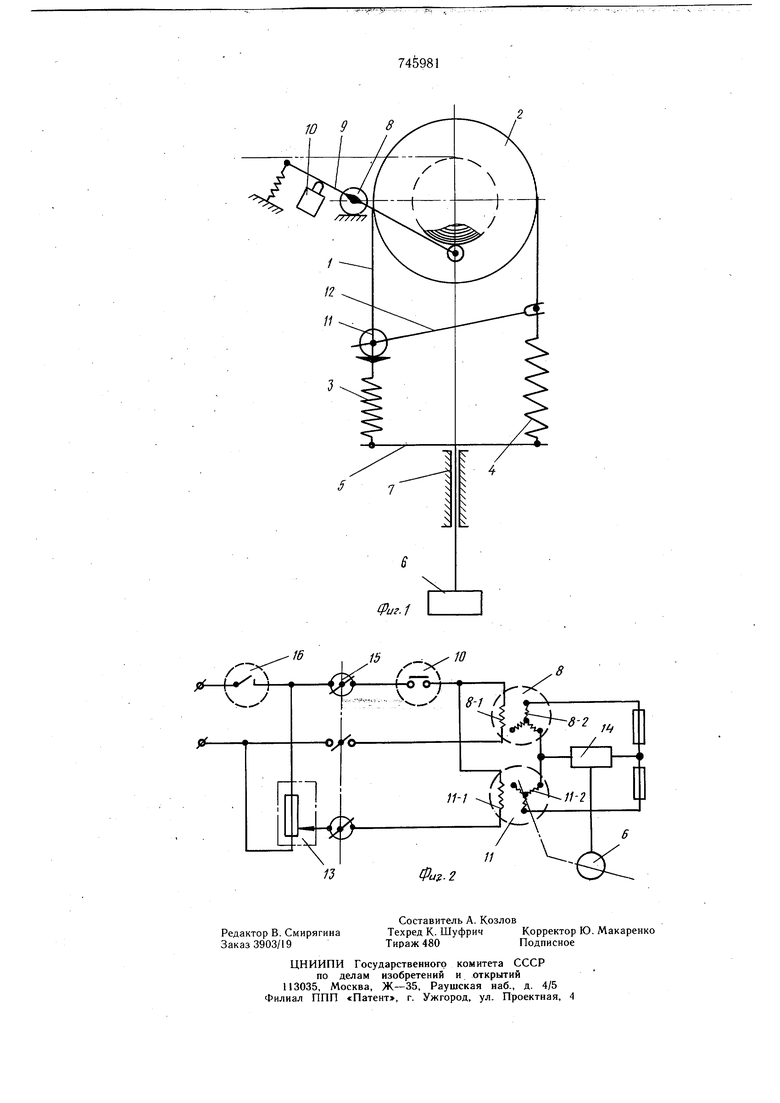
На фиг. 1 представлена кинематическая схема регулятора; на фиг. 2 - его структурная электрическая схема.
Гибкий элемент 1 охватывает шкив сновального валика -2 и своими концами прикреплен к пружинам 3, 4, имеющим одинаковые размеры и одинаковую жесткость. Противоположные концы пружин 3 и 4 укреплены на платформе 5, которая может цередвигаться исполнительным механизмом 6 по направляющим в направлении, перпендикулярном оси вращения сновального валика 2. На сновальной стойке установлен сельсин 8 с датчиком 9 контроля текущего диаметра намотки сновального валика 2 и концевым выключателем 10 контроля наличия сновального валика.На одном конце гибкого элемента 1 закреплен сельсин 11 с датчиком 12 контроля разности вытяжки пружин 3 и 4, выполненным в виде рычага. Один конец этого рычага жестко закреплен на валу сельсина 11, а другой связан с противоположным концом гибкого элемента 1.
Обмотка 8-1 сельсина 8 питается непосредственно от источника питания, а обмотка 11 - 1 сельсина 11 от потенциометра 13. Вторичные обмотки 8-2 и 11-2 сельсина соединены в схему моста, в диагонали которого установлен преобразователь сигнала 14, выход которого подключен к исполнительному механизму 6. Схема снабжена выключателем 15 для полного снятия напряжения и блок-контактом 16 для отключения регулятора при остановке машины и его включении при пуске машины.
Регулятор работает следующим образом
При остановленной машине и неподвижном сновальном валике 2 натяжение обоих концов гибкого элемента 1 одинаково, обе цружины 3 и 4 одинаково деформированы и рычаг датчика 12 контроля разности вытяжки пружин занимает горизонтальное положение. При пуске мащины сновальный валик 2 начинает вращаться, и под действием сил трения набегающая ветвь гибкого элемента 1 натягивается, а сбегающая ослабляется, что приводит к увеличению вытяжки пружины 4 и уменьщению вытяжки пружины 3. При этом контакты выключателя 10 наличия сновального валика и блокконтакта 16 замкнуты, и напряжение подается на обмотки сельсинов: Ug-i на обмотку 8-1 сельсина 8 и Un-t на обмотку сельсина 11.
Схемой обеспечивается поддержание равенства напряжений на выходных обмотках 8-2, и 11-2 сельсинов, так как последние
включены в схему моста, дебаланс которого обуславливает включение в работу усилителем исполнительного механизма 6.
Таким образом, регулятором обеспечивается поддержание постоянного натяжения нитей основы, величина которого характеризуется отношением напряжений Ug-i, U(i-i и может задаваться потенциометром 13
Осуществление регулирования по принципу поддерживания разности натяжений ветвей гибкого элемента I позволяет исключить влияние изменений коэффициента трения в тормозном устройстве, а крепление сельсина 11 на площадке, связывающей сбегающую сторону гибкого элемента 1 с пружиной, обеспечивает повышение стабильности работы за счет автоматической компенсации вытяжки гибкого элемента.
Формула изобретения
Регулятор натяжения нитей основы, содержащей датчик текущего диаметра основы, подключенный на вход преобразователя, выход которого посредством исполнительного механизма связан с тормозным устройством сновального валика, отличающийся тем, что, с целью повышения точности регулирования, тормозное устройство включает гибкий элемент с пружинами, платформу, кинематически связанную с исполнительным механизмом, и датчик контроля разности вытяжек пружин, пря этом датчики текущего диаметра основы и контроля разности вытяжек пружин снабжены сельсинами, гибкий элемент пружинами присоединен к платформе, датчик контроля разности вытяжек пружин выполнен в виде рычага, один конец которого шарнирно связан с одним концом гибкого элемента, а другой закреплен на валу сельсина датчика контроля разности вытяжек пружин, жестко установленного на втором конце гибкого элемента, причем выходы сельсинов подключены к соответствующим входам преобразователя.
Источники информации, принятые во внимание при экспертизе
с. 250-273.
