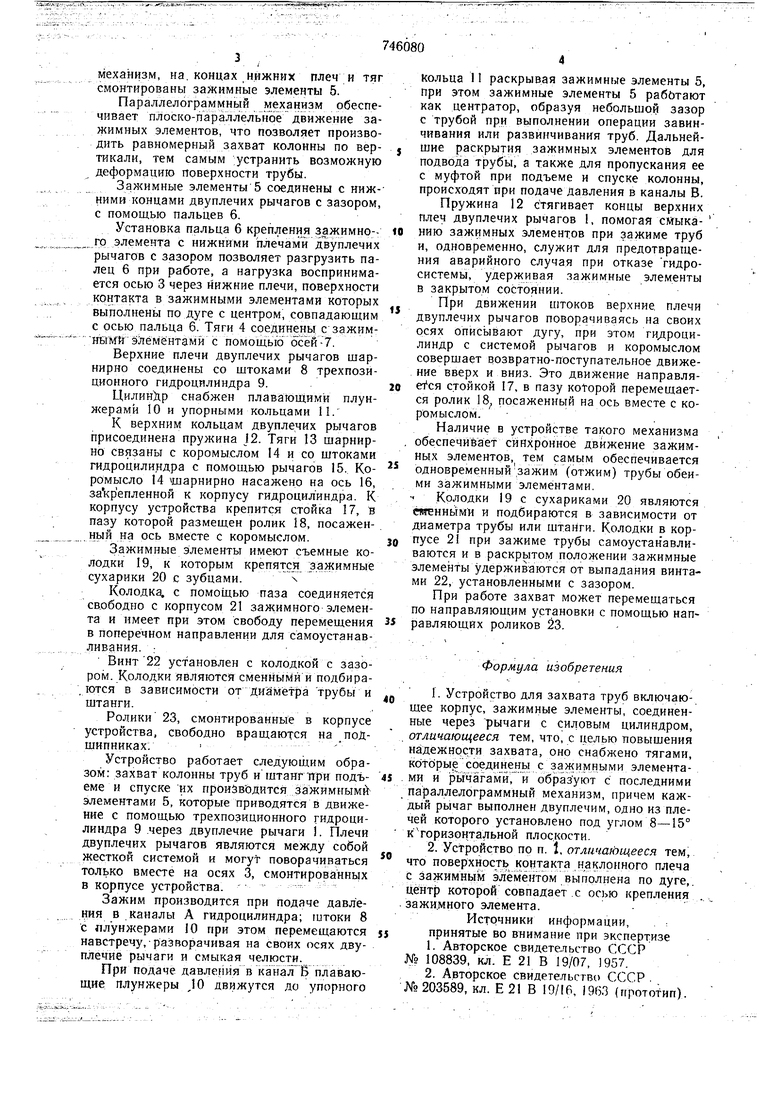
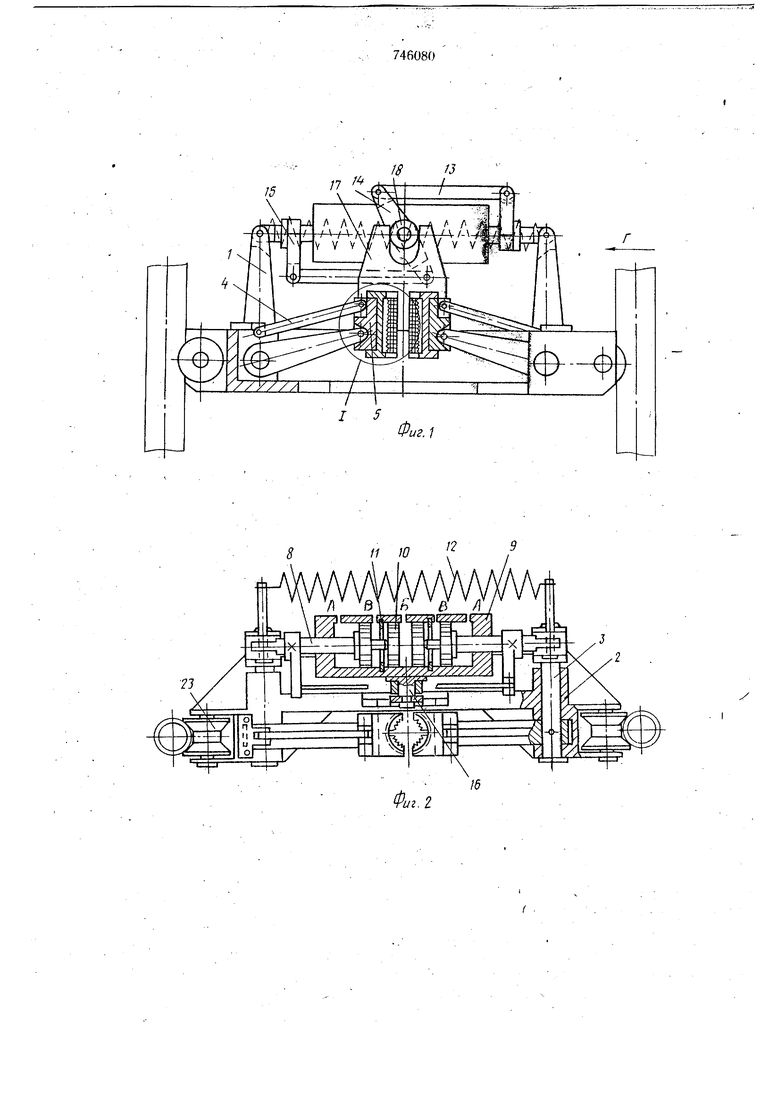
(54) УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ ««.Изобретение относится к конструкции захватных механизмов, применяемых в бурении при производстве с пу с ко-подъем ныл операций с трубами. Известно устройство для закрепления труб, содержащее клинья, установленные на штоках и, приводимые в движение от силового цилиндра I. Недостаток устройства заключается в том, что наличие значительной контактной силы в клиновом зажиме, обусловливает появление больших сил трения при расклинивании, а силовой цилиндр не в состоянии преодолеть эти силы трения и массу колонны однрвременно. Известно устройство для захвата труб, содержащее корпус, зажимные элементы, соединенные через рычаги с силовым цилиндром 2. Недостатком устройства является невозможность обеспечить достаточную силу зажима (самозаклинивания) в гладкой части трубы для удержайпя колонны на весу. Целью изобретения является повышение надежности захвата. Цель изобретения достигается тем, что устройство снабжено тягами, которые соедииены с зажимными элементами и рычагами, и образуют с последним параллелограммный механизм, причем каждый рь1чаг выполнен двуплечим, одно из плечей которого установлено под углом 8-15° к горизонтальной плоскости, k поверхность контакта наклонного плеча с зажимным элементом выполнена по дуге, центр которой совпадает с осью крепления зажимного элемента. Размещение наклонных плечей рычагов под углом 8-15° обеспечивает самозаклинивание устройства при зажиме, надежно удерживает вес колонны и позволяет производить освобождение колонны,.с небольшим усилием гидроцилиндра. На фиг. 1 - общий вид устройства; на фиг. 2 - вид в плане;, на фиг. 3 - узел I фиг. 1; на фиг. 4 - то же, вид в плане; на фиг. 5 - вид Г фиг. 1. Устройство для захвата труб и штанг состоит из двух двуплечих рычагов I, которые смонтированы щариирно в корпусе 2 с помош,ью оси 3. Параллельно с нижними плечами двуплечих рычагов установлены тяги 4, составляющие вместе с ними параллелограммный механизм, на. концах нижних плеч и тяг смонтированы зажимные элементы 5. Параллелограммный механизм обеспечивает плоско-параллельное движение зажимных элементов, что позволяет производить равномерный захват колонны по вертикали, тем самым устранить возможную деформацию поверхности трубы. Зажимные элементы 5 соединены с нижними концами двуплечих рычагов с зазором, с помощью пальцев 6. Установка пальца 6 крепления зажимногр элемента с нижними плечами двуплечих рычагов с зазором позволяет разгрузить палец 6 при работе, а нагрузка воспринимается осью 3 через нижние плечи, поверхности контакта в зажимными элементами которых выполнены по дуге с центром, совпадающим с осью пальца 6. Тяги 4 соединены с зажим.нБгМйэЛёмёнтамй с помощью осей-7. Верхние плечи двуплечих рычагов шарнирно соединены со щтоками 8 трехпозиционного гидроцилиндра 9. Цилин)1р снабжен плавающими плунжерами 10 и упорными кольцами 11/ К верхним кольцам двуплечих рычагов присоединена пружина J2. Тяги 13 шарнирно связаны с коромыслом 14 и со штоками гидроцилиндра с помощью рычагов 15. Коромысло 14 шарнирно насажено на ось 16, закрепленной к корпусу гидроцилиндра. К корпусу устройства крепится стойка 17, в пазу которой размещен ролик 18, посаженнь1Й на ось вместе с коромыслом. Зажимные элементы имеют съемные колодки 19, к которым крепятся зажимные сухарики 20 с зубцами.N Колодка, с помощью паза соединяется свободно с корпусом 21 зажимного элемента и имеет при этом свободу перемещения в поперечном направлении для самоустанавливания. ; Винт22 установлен с колодкой с зазором. Колодки являются сменн ымй и подбира, ются в зависимости от диаметра трубы и штанги. Ролики 23, смонтированные в корпусе устройства, свободно вращаются на подшипниках;Устройство работает следующим образом: захват колонны труб и штангПри подъеме и спуске их производится зажимнымиэлементами 5, которые приводятся в движение с помощью трехпозиционного гидроцилиндра 9 .через двуплечие рычаги 1. Плечи двуплечих рычагов являются между собой жесткой системой и Moryt поворачиваться только вместе на осях 3, смонтированных в корпусе устройства. Зажим производится при подаче давлеция в .каналы А гидроцилиндра; гитоки 8 с плунжерами 10 при этом перемещаются навстречу,-разворачивая на своих осях двуплечие рычаги и смыкая челюсти. При подаче давления в канал Б плавающие плунжеры JO движутся до упорного Кольца 11 раскрывая зажимные элементы 5, при этом зажимные элементы 5 работают как центратор, образуя небольшой зазор с трубой при выполнении операции завинчивания или развинчивания труб. Дальнейшие раскрытия зажимных элементов для подвода трубы, а также для пропускания ее с муфтой при подъеме и спуске колонны, происходят при подаче давления в каналы В. Пружина 12 стягивает концы верхних плеч двуплечих рычагов I, помогая смыканию зажимных элементов при зажиме труб и, одновременно, служит для предотвращения аварийного случая при отказе гидросистемы, удерживая зажимные элементы в закрытом состоянии. При движении штоков верхние плечи двуплечих рычагов поворачиваясь на своих осях описывают дугу, при этом гидроцилиндр с системой рычагов и коромыслом совершает возвратно-поступательное движение вверх и вниз. Это движение направляе1 ся стойкой 17, в пазу которой перемешается ролик 18 посаженный на ось вместе с коромыслом. Наличие в устройстве такого механизма обеспечивает синхронное движение зажимных элементов, тем самым обеспечивается одновременныйзажим (отжим) трубы обеими зажимными элементами. Колодки 19 с сухариками 20 являются сиЕННьши и подбираются в зависимости от диаметра трубы или штанги. Колодки в корпусе 2 при зажиме трубы самоустанавливаются и в раскрытом положении зажимные элементы удерживаются от выпадания винтами 22, установленными с зазором. При работе захват может перемешаться по направляющим установки с помощью направляющих роликов 23. Формула изобретения 1.Устройство для захвата труб включающее корпус, зажимные элементы, соединенные через рычаги с силовым цилиндром, отличающееся тем, что, с целью повыщения надежности захвата, оно снабжено тягами, которые соединень с зажимными элементами и рь1чагам й, и образуют с последними Параллелограммный механизм, причем каждый рычаг выполнен двуплечим, одно из плечей которого установлено под углом 8-15° кторизонтаЛьной плоскости. 2.Уctpoйcтвo по п. 1, отличаг лцееся тем, что поверхность контакта наклонного плеча с зажимньш элементом выполнена по дуге,, центр которой совпадает.с осью крепления зажи.много элемента. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 108839, кл. Е 21 В 19/07, 1957. 2.А.вторское свидетельство СССР . №203589, кл. Е 21 В 19/16, 1963 (прототип). IS 15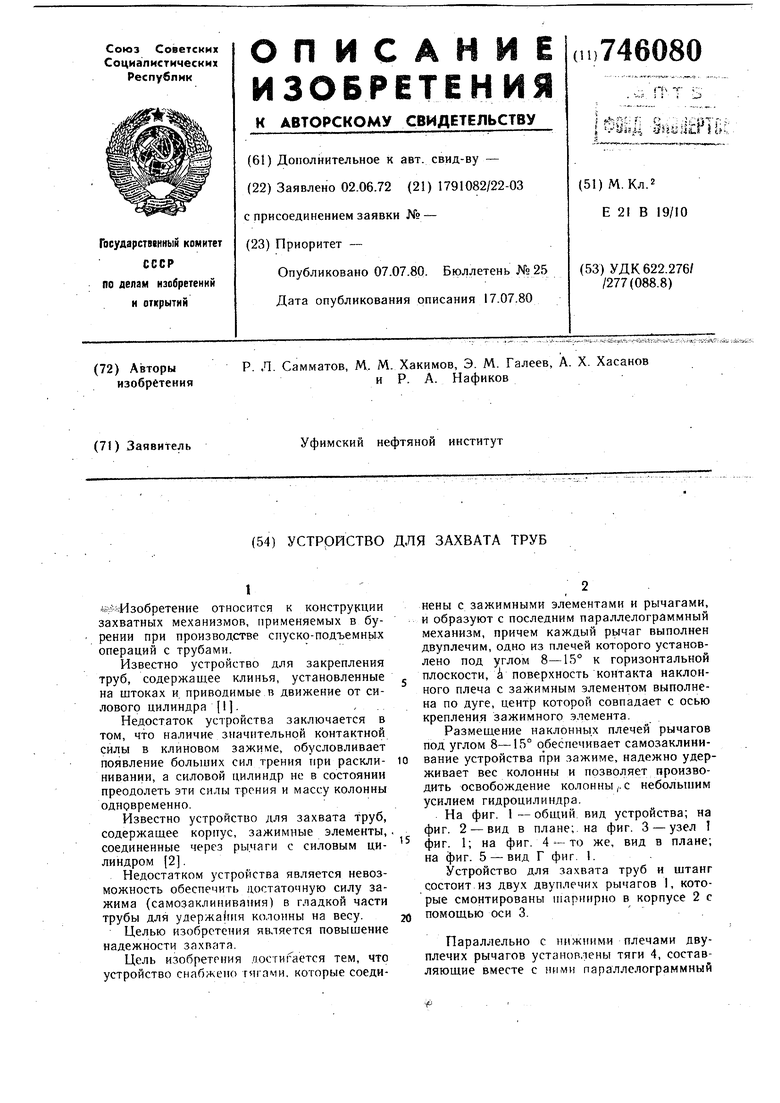
| название | год | авторы | номер документа |
|---|---|---|---|
| Прицепной пресс высокого давления к пресс-подборщикам льна низкого давления | 1981 |
|
SU990119A2 |
| ДИСКОВЫЙ ТОРМОЗ КОЛЕСНОЙ ПАРЫ | 2012 |
|
RU2505442C1 |
| Машина для сварки дугой, вращающейся в магнитном поле | 1988 |
|
SU1712090A1 |
| Устройство для перемещения груза | 1982 |
|
SU1066909A1 |
| ЗАЖИМ РЫЧАЖНОЙ ЛЕБЕДКИ | 1988 |
|
SU1837569A1 |
| ЗАЖИМ РЫЧАЖНОЙ ЛЕБЕДКИ | 1989 |
|
RU2035385C1 |
| Устройство для продольного перемещения рельсов железнодорожного пути | 1988 |
|
SU1830098A3 |
| РЫЧАЖНАЯ ЛЕБЕДКА | 1989 |
|
RU2076839C1 |
| Самоходный многорядный картофелеуборочный комбайн | 1990 |
|
SU1811772A1 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
П
Фиг.д
