2. УртроЯство по п.1, о т л и чающееся, тем, что допелнительный привод выполнен в виде силового цилиндра. . 1066909 3, Устройство по п. 1, от личаюцееся тем, что двуплечие рычаги имеют зажимные губки.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |
| Подвесной манипулятор | 1972 |
|
SU559819A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| УСТАНОВКА ДЛЯ ОБВЯЗКИ БУНТОВ | 1993 |
|
RU2054363C1 |
| Конвейер-перекладчик автоматической линии | 1986 |
|
SU1328259A1 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| МАШИНА ДЛЯ СТЫКОВОЙ СВАРКИ ПОЛОС | 2002 |
|
RU2246385C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Устройство для намотки ленты на катушку на текстильных машинах | 1966 |
|
SU268949A1 |
| Устройство для резки труб | 1977 |
|
SU742053A1 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА, содержащее рабочий ор ган с зaкJэeплённiJM на нем зажимом для изделия в виде синвиетричного р чажного механизма и привод возврат но-поступательного перемещения рабочего органа, отличающе е с я тем, что, с целью повьиаения надежности работы устройства, оно снабжено закрепленными на рабочем органе дополнительным приводом и корпусом зажима, а также расположенным на корпусе зажима и связанным с дополнительным приводом ползуном с пазом, при этом рычажный механизм выполнен в Виде Пары двуплечих рычагов, пары шарнирно связанных соответственно с последними и между собой одноплечих рычагов, шарнирно связанного с последними плунжера с роликом и пары соединенных между собой посредством упругого злемента тяг с пазами, каждая из которых шарнирно связана с соответствующим двуплечим рычагом и посредством оси, размещенной в пазу тяги, с корпусом зажима, причем кгикдый двуплечий рычаг снабжен упором, установленным с возможностью взаимодействия с соответствующей тягрй, и ограничителем, установленным с возможностью взаимодействия с ограничителем другого двуплечего рычага, при этом ролик плунжера pacпoлo}keн в пазу ползуна.
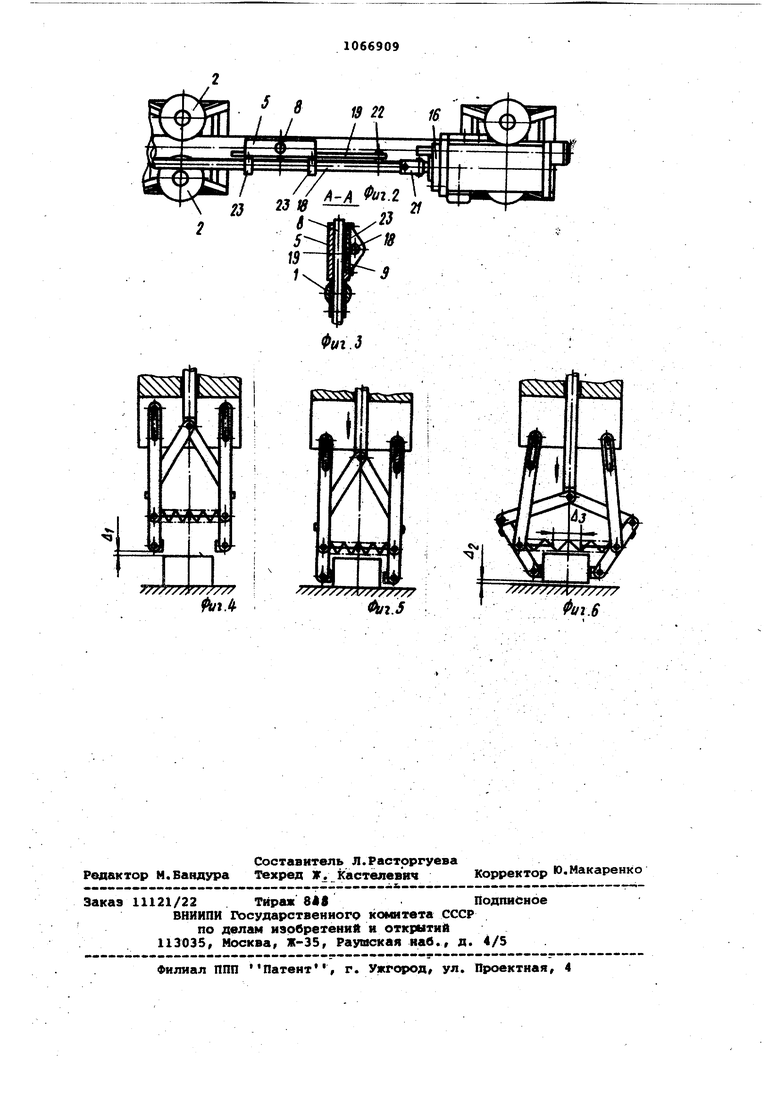
Изобретение относится К;машиностроению и может быть использовано при автоматизации погрузочно-разгрузочных и подъёмно-транспортных работ.. . Известны шаговые конвейеры, содержащие штангу с закрепленными по длине подпружиненными собачками, установленную с возможностью возвра но-поступательного перемещения, привод возвратногпоступательного пе ремещения штанги, .три этом обеспечивается дискретное перемещение детали по лотку, установленному парал лельно штанге til. К недостаткам таких конвейеров относятся необходимость регулирования скорости перемещения штанги по определенному закону для преду преждения проскакиванйя деталей да ше установочных элементом приспосо ne,Kfif низкая точность базирования лежалей по плоскости и двум отверстиям на фиксаторы-пальцы, которые ввиду иевозможности приподнимать детали при транспортировке должны быть выполнены подвижными, i sodxo, применения приспособ лекий-спутников для транспортировк К1еус;тойчявых или имеющих сложную форму деталей, износ базовых повер иойтей деталей, что особенно нежелательно при транспортировке деталей из у.ягких материалов i Наиболее близким к изобретению является устройство для перемещения груза, содержащее рабочий орга с закрег.венным а нем зажимсял для издеш я в виде симметричного рычаж ного механизма и привод возвратно1 поступательного перемещения рабо-. 1чего Органа Г2 . Неде ;гатки указанного устройства состоят в наличии привода, обеспечивающего вертикальный подъем рабочего органа, а также в усложненном выполнении несущих опор рабочего органа ввиду необходимости обеспечения его перемещения в двух в аимно перпендикулярных направлениях Из-за наличия вертикального перемецения рабочего органа происходит повышенный износ элементов конструк ции устройства, в результате чего снижается надежность его работы. Целью изобретения вляется повышение надежности работы устройства. Указанная цель достигается тем, что устройство для перемещения груза, содержащее рабочий орган с за крепленным на ием зажимом для изделия в виде симметричного рычажного механизма и привод возвратно-поступательного перемещения рабочего органа, снабжено закрепленными на рабочем органе дополнительным приводом и корпусом зажима, а также расположенным на корпусе зажима и связанным с дополнительным приводом ползуном с пазом, при этом рычажный механизм выполнен в виде пары двуплечих рычагов, пары шарнирно связанных соответственно с последними И между собой одноплечих рычагов, шарнирио связанного с. последними плунжера с роликом и пары соединенных между собой посредством упругого элемента тяг с nasai i, каждая из которых шарнирно связана с соответствующим двуплечим рычагом и посред-, ством оси, разм ценной в пазу тяги, с корпусом зажима, причем каждый двуплечий рьпаг снабжен упором, устаяовленяьм с возможностью взаимодействия с соответствующей тягой, и. ограничителем, установленньм с возможностью взаимодействия с ограничителем другого двуплечего рычага, при этом ролик плунжера расположен в пазу ползуна. Кроме того, дополнительный привод выполнен в виде силового цилиндра. Причем двуплечие рычаги имеют зажимные губки. На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 то же, вид сверху; на фиг.З - сечеиие А-А на фиг.1; на фиг.4 - последовательность работы рычажного зажима. Устройство для перемещения груза содержит {Рабочий орган в виде штаиги 1, установленной в поддерживгиощих роликах 2 несущих опор 3, привод 4 возвратно-поступательного перемещения штаиги 1, закрепленные по дпиие йхангй 1 поспедством корпуса 5 зажимы для изделия в виде сим4етричиых рычгикиых механизмов.
каждый из которых выполнен в виде пары двуплечих рычагов 6, пары шарнирно связанных соответственно с последними и между собой одноплечих рычагов 1, шарнирно связанного с последними плунжера 8 с роликом 9 и пары соединенных между собой посредством упругого элемента - пружи ны10 - тяг 11 с пазат 12, каж- дая из которых шарнирно связана с соответствующим двуплечим рычагом 6 и посредством оси 13, размещенной в,пазу 12 тяги 11 с корпусом 5 зажима, причем каждщй из двуплечих рычагов 6 снабжен упором 14, установленным с возможностью взаимо действия с соответствующей И и ограничителем 15, установленным с возможностью взаимодействия с ограничителем 15 другого двуплечего рычага 6,Креме того, устройство снабжено закрепленным на рабочем органе посредством кронштейна 16 и выполненным в виде силового цилиндра - гидроцилиндра 17 дополнительным приводом, а также расположенным на корпусе 5 зажима в направляющих и связанным с дополнительным приво дом - гидроцилиндром 17 посредством тяги 18 ползуном 19 с пазом 20. Тяга 18 посредством муфты 21 соедииена со штоком гидроцилиндра 17 дополнительного привода, а посредство пальца 22 с ползуном 19, при эток тяга 18 пропущена в направляющие отверстия кронштейнов 23.
Ролик 9 плунжера 8 расположен в пазу 20 ползуна 19, а двуплечие рычаги 6 имеют зажимные губки 24 для захвата транспортируемого груза 25.
Устройство работает следующим образом.
В исходном состоянии штанга 1 и тяга 18 находятся в крайних левых положениях. При этом каждый рычажный зажим устройства находится в верхнем положении и располагается над очередным грузом, подлежащим транспортировке (фиг.4). Включение гидроцилиндра 17 вызывает перемещение тяги 18, а с ней и ползуна 19 вправо. Ролик 9, обкатываясь по наклонному пазу 20 ползуна 19/ перемещает плунжер 8 вниз. Наличие пазов 12 под оси 13 подвеса несущих тяг.11 приводит к опусканию двуплечих рычагов 6 вниз на высоту, определяемую длиной пазов
12 и необходимую для осуществления надежного захвата груза 25 (фиг.5). Дальнейшее перемещение плунжера 8 вниз до остановки приводит к сложному повороту двуплечих рычагов 6 посредством одноплечих рычагов 7 и тяг 11 в плоскости рычажного механизма, что вызывает зажатие груза
25 И подъем его на высоту 4-. , причем усилие зажима характеризуется величиной деформации рабочей прудины 10 - 42 (фиг.6). После подачи команды на привод 4 возвратно-поступательного перемещения штанги 1 происходит транспортирование груза вправо на следующую позицию. В крайнем правом положении штанги 1 включается гидроцилиндр 17. Тяга 18 перемещается влево, а плунжер 8 двигается вверх. Это приводит к слоному повороту двуплечих рычагов 6 в обратном направлении. В результате - груз 25 опускается на поверхность позиции и разжимается, а двуплечие рычаги 6 перемещаются в крайнее верхнее положение. Одновременно с выключением гидроцилиндра 17 включается привод 4 штанги 1 и штанга перемещается в крайнее левое положение. При этом между рычажны- ми механизмами и лежащим на позициях грузом выдерживается необходиг1 ЛИЙ зазор д (фиг.4). В дальнейшем цикл работы повторяется.
Вышеописанное устройство для перемещения груза представляет собой простую с малой металлоемкостью конструкцию, обладает высокой игедежностью , менее трудоемко приизготовлении и эксплуатации, проще в управлении. Это объясняется тем, что в данном устройстве значительно сокращена масса подвижных частей, так как приподнятие груза при транспортировании происходит без вертикального плоскопаргшлельного движения штанги, а это исключает необходимость применения громоздкого привода вертикального перемещения опор штанги, требующего применения сло) системы управления и больших трудовых затрат на изготовление и обслуживание. Наличие упругого элемента (пружины 10) в конструкции рычажного механизма позволило ослабить чувствительность убтройства к колебаниям размера базы груза, используемой для зажима, и к неточностям изготовления самого рычажного механизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабинович А.Н | |||
| Автоматизация загрузки и разгрузки металлообрабатывакицего оборудования | |||
| М.-Киев | |||
| Машгиз, 1963, с.106-108, фиг.67а | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
