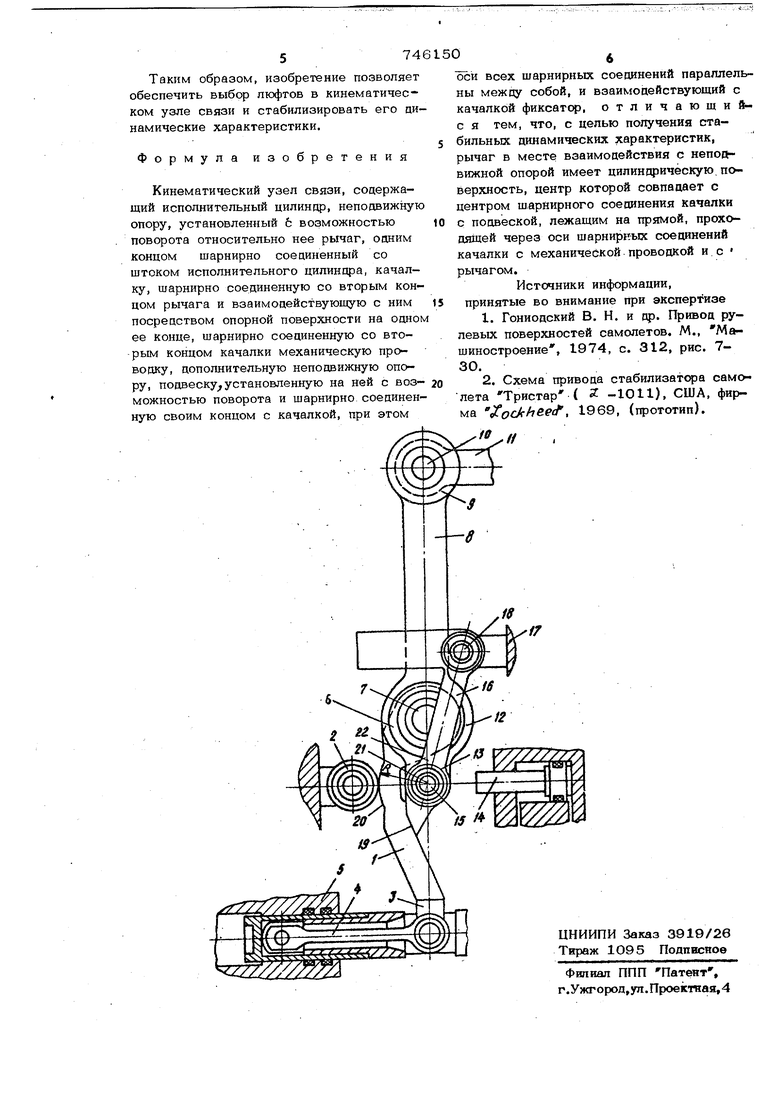
(54) КИНЕМАТИЧЕСКИЙ УЗЕЛ СВЯЗИ Изобретение относится к кинематическим механизмам передачи, применяемым в агрегатах систем управления летательными аппаратами. Известен кинематический узел связи, содержащий рычаг, одним концом шарнирно связанный со штоком исполнительного цилиндра, а другим - с механической проводкой управляемого устройства CllВыполнение узла связи в виде рычага с жесткой опорой не позволяет развязать шток исполнительного цилиндра рулевого агрегата с механической проводкой управления. Наиболее близким к изобретенинэ по технической сущности является кинематический узел связи, содержащий испопн тельный цилиндр, неподвижную опЪру, установленный с возможностью поворота относительно нее рычаг, одним концом шарнирно соединенный со штоком йспол- лительного питтарй, качалку шарнирно соеаивевную со вторым концом рычага И взавмодействукждую с ним посредством опорной поверхности на одном ее койцё, шарнирно соединенную со вторым концом качалки механическую проводку, дополнительную неподвижную опору, подвеску, установленную на ней с возможностью поворота и шарнирно соединенную своим КОНЦОМ с качалкой, причем оси всех шарнирных соединений параллельны собой, и взаимодействующий с качалкой фикcai-op СзЗ. Недостатком узла связи $шляе1 ся возможность перемещения фиксатора при повороте рычага во время передачи УСИЛИЯ от исполнительного цилиндра к механической прсеодке. Ввиду TOfо, что дополнительное усилие меняется по величине в зависимости от положения рычага, выходные характеристики исполнительного цилиндра (например, скоростные) являются нестабильными Целью изобретения является получение стабильных динамических характеристик. Поставленная цель достигается тем, что рычаг в месте взаимодействия с неподвижной опорой имеет цилиндрическую поверхность, центр которой совпадает с центром шарнирного соединения какачалки с подвеской, лежащим на прямой, проходящей через оси шарнирных соединений качалки с механической проводкой и рычагом. На чертеже показана конструктивная схема кинематического узла связи, Кинематический узел связисодержит рычаг 1, установленный с воэможностью Поворота относительно неподвижной опоры 2 и одним концом 3 шарнирно связанный со штоком 4 исполнительного цилиндра 5, а вторым KOHuoNf 6 через шарнириое соединение 7 - с качалкой 8. Качалка 8 концом 9 соепинена через шарнирное соединение Юс механической проводкой 11, а концом 12 через шарнирную оп ру 13 может взаимодействовать с фиксатором 14. Конец 12 качалки 8 через шарнирное соециневие 15, соосное с шарнирной опорой 13, связан с подвеской 16, укрепленной на дополнительной непод вижной опоре 17 с воэможностью вращения относительно нее (вокруг ее оси 18 Качалка 8 опорной поверхностью 9 конта тирует с рычагом 1. Рычаг 1 в месте касания с неподвижной опорой 2 имеет цилиндрическую поверхность 20 с радиусом кривизны R, центр которого расположен на оси 21 шарнирного соединения 15. Оси шарнирных соединений 7, Ю и 15 расположены на одной прямой 22. Кинематический узел связи работает следующим образом. Фиксатор 14, приводимый в движение любым способом, например гидравлическим , занимает крайнее левое положение перемещаясь до упора в шарнирную опору 13. Качалка 8, перемещаясь совместно с опорой 13, упирается в рычаг 1 опорной поверхностью 19, при этом выби раются люфты между качалкой 8, ры чагом 1 и неподвижной опорой 2. Кинематическая пара рычаг 1 - качал ка 8 работает как единое целое, вращаяс относительно оси шарнирного соединения 15 с одновременным поворотом относительно неподвижной опоры 2. При этом расстояние от оси шарнирного соединения 15 до точки касания рычага I с неподвимсной опорой 2 остается неизменным, так как-поверхность рычага 1 в этом есте выполнена цилиндрической формы ; радиусом кривизны R. Кроме того, расстояние меж 1 осью 18 шарнирного соединения подвески 16 и йопоЛштельной неподвижной опоры 17 и осью шарнирного соединения 15 выбирают таким образом, чтобы в процессе работы осинеподвижной опоры 2, шарнирного соединения 15 и фиксатора 14 были расположены на одной прямой 22. Все это позволяет, независимо от перемещения жесткого соединения рычаг 1 - качалка 8, устранить перемещение штока фиксатора 14, т. е. на цилиндр 5 не воздействуют дополнительные нагрузки, в результате чего исполнительный цилиндр можно выбрать с меньшим развиваемым усилием, а его выходные характеристики, например скоростные,„отличаются стабильностью. Усилие, передаваемое со штока 4 цилиндра 5 через кинематическую пару рычаг I - качалка 8 на механическую про- водку 11, определяется соотношением длин (плеч) рычага 1 и качалки 8 относительно неподвижной опоры 2. Фиксатор 14 расположен в крайнем правом положении, не оказывая воздействия на качалку 8 (кинематическая пара рычаг 1 - качалка 8 расфиксирована). При перемещении штока 4 цилиндра 5 вправо кинематическая пара рычаг-качалка продолжает работать как единое целое, благодаря наличию опорной поверхности 19 качалки 8 для контактирования с рычагом I. Однако при этом усилие от штока 4 не передается на механическую проводку 11 из-за совместного перемещения кинематической пары рычаг-качалка с подвеской 16 относительно неподвижной опоры 17. В этом случае возможна фиксация в определенной точке механической проводки 11 при перемещении исполнительного цилинщэа, и наоборот. При перемещении штока 4 влево рычаг 1 поворачивается относительно качалки 8 около опоры 2. Нарушается их взаимодействие по опорной поверхности 19, и кинематиче ская пара складьюается. Усилие на механическую проводку 11 от штока 4 исполнительного цилингфа 5 (и наоборот) не передается, благодаря чему они могут как перемещаться независимо от друга, так и оставаться в зафиксированном положении. При переходе на ручное управление механическая проводка 11 не испытыва ет дополнительных нагрузок от штока 4, благодаря чему ручное управление облегчается. В этих условиях в качестве нагрузки остается только усилие трения ё шарнирных, соединениях кинематического узла связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |
| БЫСТРОХОДНОЕ СУДНО | 2009 |
|
RU2396180C1 |
| КРЕСЛО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ОПОРНО-ПОВОРОТНЫМ МЕХАНИЗМОМ | 2020 |
|
RU2752434C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ ТРОСОВ СИСТЕМЫ УПРАВЛЕНИЯ | 2000 |
|
RU2180640C2 |
| ФОРТОЧКА КАБИНЫ ЭКИПАЖА САМОЛЕТА | 2011 |
|
RU2475413C1 |
| УСТАНОВКА РУЛЕВОГО ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2636195C2 |
| УСТАНОВКА ДУБЛИРОВАННЫХ РУЛЕВЫХ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2021 |
|
RU2773301C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ПРИВОД РУЛЕВОЙ | 2015 |
|
RU2591005C1 |
