Изобретение относится к области комбинированных систем управления летательным аппаратом и может быть использовано в качестве суммирующего устройства в системах, использующих гибкие тяги управления.
Известна система комбинированного управления вертолетом Ми-8МТ, где сложение действий пилота и коррекции от автопилота происходит за счет использования комбинированных агрегатов управления КАУ-30Б (8МТ-007-00РЭ. Руководство по технической эксплуатации 065.040.00, с. 5) с тремя режимами работы: ручное управление (когда пилот через входную качалку и распределительный клапан управляет силовым гидроцилиндром), автоматическое - при отключенном канале ручного управления, автопилот через входное реле управляет силовым гидроцилиндром и комбинированное - при действующем канале ручного управления автопилот через входное реле управляет цилиндром комбинированного управления (Рулевые агрегаты КАУ-30Б и РА-60А. Инструкция по эксплуатации, с. 8, 10, 13). Переключение между режимами работы производится сигнальным давлением. В режиме комбинированного управления КАУ-30Б совмещает функции гидроусилителя и рулевого исполнительного механизма.
Также известна система комбинированного управления вертолетом Ми-17 с комбинированным агрегатом управления КАУ-115А (Ми-17-1В. Руководство по технической эксплуатации. Управление. Описание и работа. 065.40.00, с. 5, октябрь 5/2000) с двумя режимами работы: ручное управление (когда пилот через входную качалку и распределительное устройство управляет силовым гидроцилиндром) и комбинированное управление (при действующем канале ручного управления автопилот через электромеханический преобразователь управляет положением штока рулевой машины с закрепленной на нем входной качалкой) (Комбинированный гидравлический рулевой привод КАУ-115. Руководство по технической эксплуатации, 16.04.1987 г. 5.3. Режим комбинированного управления, с. 4, 6).
Недостатками комбинированных агрегатов управления являются дороговизна и сложность подбора агрегата на стадии проектирования.
Известно устройство управления (Патент US 201104824 А1, 24.02.2011, МПК G05D 3/12), где движение рычага управления при работе рулевого исполнительного механизма исключается за счет блокировки электрическим механизмом, которым управляет логическая схема по показаниям датчика усилий, промежуточной качалки.
Недостатком такого устройства является сложность конструкции, лишний вес и необходимость подвода электрической энергии к механической проводке управления.
Известна гидромеханическая система управления, установленная на вертолете Ми-38, где сложение действий пилота и системы улучшения устойчивости происходит за счет установленных рулевых исполнительных механизмов. Гидромеханическая система управления вертолета Ми-38 содержит гидроусилители, расположенные с трех сторон от автомата перекоса, рулевые исполнительные механизмы с тягами, механическую проводку управления, состоящую из тяг и качалок (Вертолет Ми-38-2. Руководство по технической эксплуатации. 4.2. Продольно-поперечное управление - описание и работа. 065.41.00. с. 1, 03.02.2014 г.). Данный аналог принят за прототип.
Недостатком прототипа является размещение рулевых исполнительных механизмов не на гидроусилителе РП-10А, а на предшествующем звене цепи механической проводки управления, что увеличивает вероятность движения рычагов управления при работе системы улучшения устойчивости вместо движения золотника гидроусилителя. Габариты спаренных рулевых исполнительных механизмов ИРМД-1 при последовательном размещении в механической проводке управления не позволяют разместить их непосредственно на гидроприводе (гидроусилителе).
Рулевые исполнительные механизмы ИРМД-1, установленные последовательно к проводке управления, служат для корректировки действий пилота системой улучшения устойчивости.
На многих существующих вертолетах, использующих механическую систему управления, применяют комбинированные агрегаты управления (КАУ), представляющие гидроусилитель (гидропривод) с встроенным в него подруливающим устройством. Подруливающее устройство - часть механизма комбинированного гидравлического привода, через которую автопилот (или система улучшения устойчивости) может корректировать положение выходного штока.
Другим вариантов корректировки управления автопилотом является применение рулевых исполнительных механизмов. В этом случае на вертолет устанавливают гидропривод, а в механическую проводку управления ставят подруливающий механизм, представляющий тягу, длина которой корректируется автопилотом (или системой улучшения устойчивости).
Цель изобретения - установка рулевых исполнительных механизмов в механическую проводку управления, состоящую из гибких тяг и качалок, не меняя ее конфигурации и размеров, и обеспечение их срабатывания без вовлечения в работу рычагов управления пилота.
Поставленная цель достигается тем, что в гидромеханической системе управления, содержащей гидроусилители, расположенные с трех сторон от автомата перекоса, рулевые исполнительные механизмы с тягами, механическую проводку управления, состоящую из тяг и качалок, рулевые исполнительные механизмы, установленные параллельно механической проводке управления, выполненной с применением гибких тяг, имеют возможность управлять положением опор оболочек гибких тяг.
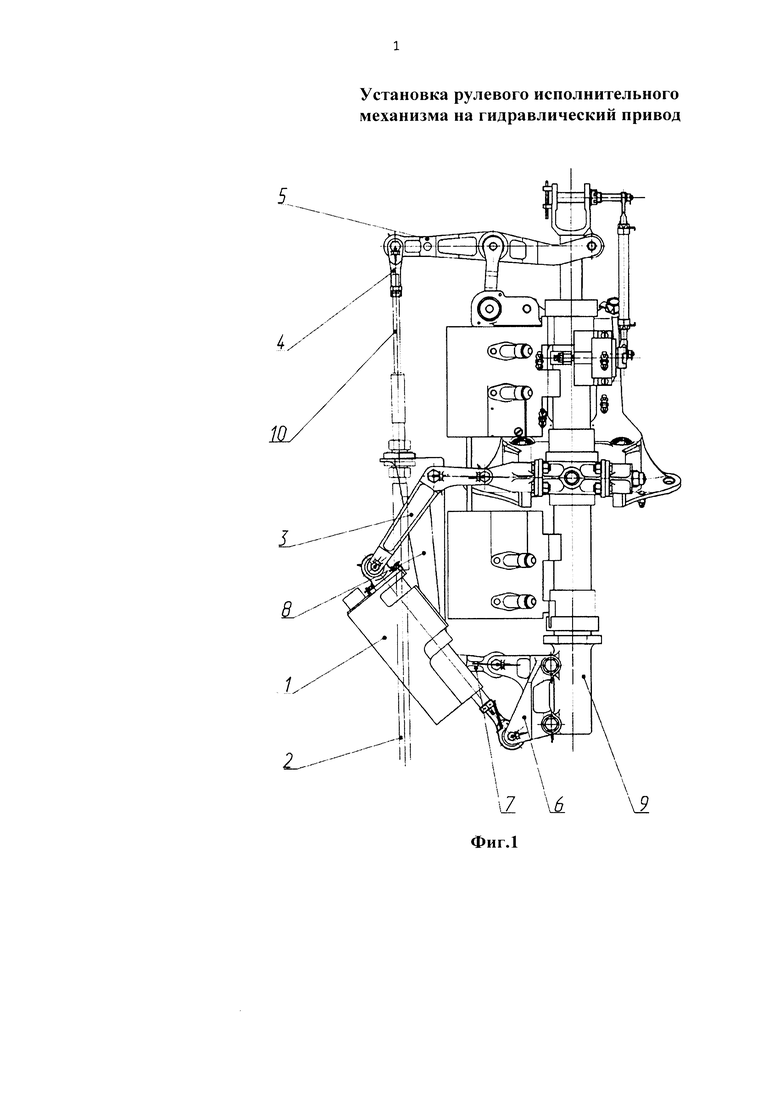
На фиг. 1 показана схема установки рулевого исполнительного механизма SEMA 8493 на гидропривод РП-14, где обозначено:
1. рулевой исполнительный механизм SEMA 8493;
2. оболочка гибкой тяги управления;
3. качалка;
4. наконечник гибкой тяги управления;
5. входная управляющая качалка гидропривода РП-14; (входит в состав гидропривода);
6. кронштейн;
7. поводок;
8. кронштейн (опора оболочки гибкой тяги управления);
9. гидропривод РП-14 (гидроусилитель);
10. внутренний стержень гибкой тяги управления.
Рулевой исполнительный механизм 1 SEMA 8493 установлен параллельно механической проводке управления, которая состоит из оболочки 2 гибкой тяги, шарнирно закрепленной на кронштейне 8 и ее внутреннего стержня 10. Нижним концом кронштейн 8 через шарнирный поводок 7 и кронштейн 6 закреплен на гидроприводе 9 РП-14, а верхним концом подвижно соединен с качалкой 3. Оболочка 2 гибкой тяги управления шарнирно закреплена на кронштейне 8, служащем ее опорой, а ее внутренний стержень 10 через наконечник 4 верхним концом соединен с входной управляющей качалкой 5 гидропривода 9.
Рулевой исполнительный механизм, установленный на гидроприводе, работает в двух режимах управления следующим образом.
В режиме ручного управления рулевой исполнительный механизм 1 SEMA 8493 не получает сигнала от системы улучшения устойчивости и его шток, а также качалка 3, кронштейн 8 с шарнирно установленной на нем опорой гибкой тяги управления (связана с оболочкой 2) и поводком 7 неподвижны. Управление гидроприводом 9 с закрепленным на нем кронштейном 6 происходит за счет перемещения человеком через рычаги управления стержня 10 внутри неподвижной оболочки 2 гибкой тяги управления, установленной на кронштейне 8. Перемещения гибкой тяги управления через наконечник 4 приводят к отклонениям входной управляющей качалки 5 гидропривода 9.
В автоматическом режиме управления, при получении сигнала от системы улучшения устойчивости, рулевой исполнительный механизм 1 SEMA 8493 через качалку 3 изменяет положение кронштейна 8 с шарнирно установленной на нем опорой гибкой тяги управления (связана с оболочкой 2). Для обеспечения заданного движения кронштейна 8 при работе рулевого исполнительного механизма 1 нижняя часть его через поводок 7 связана с кронштейном 6, неподвижно установленным на гидроприводе 9. Перемещения гибкой тягой управления входной управляющей качалки 5 через наконечник 4, задаваемые рулевым исполнительным механизмом 1, происходят без изменения величины выхода стержня 10 из оболочки 2 гибкой тяги управления.
Внутренний стержень гибкой тяги управления 10 и оболочка 2 составляют гибкую тягу управления.
Входная управляющая качалка 5 является составной частью гидропривода РП-14.
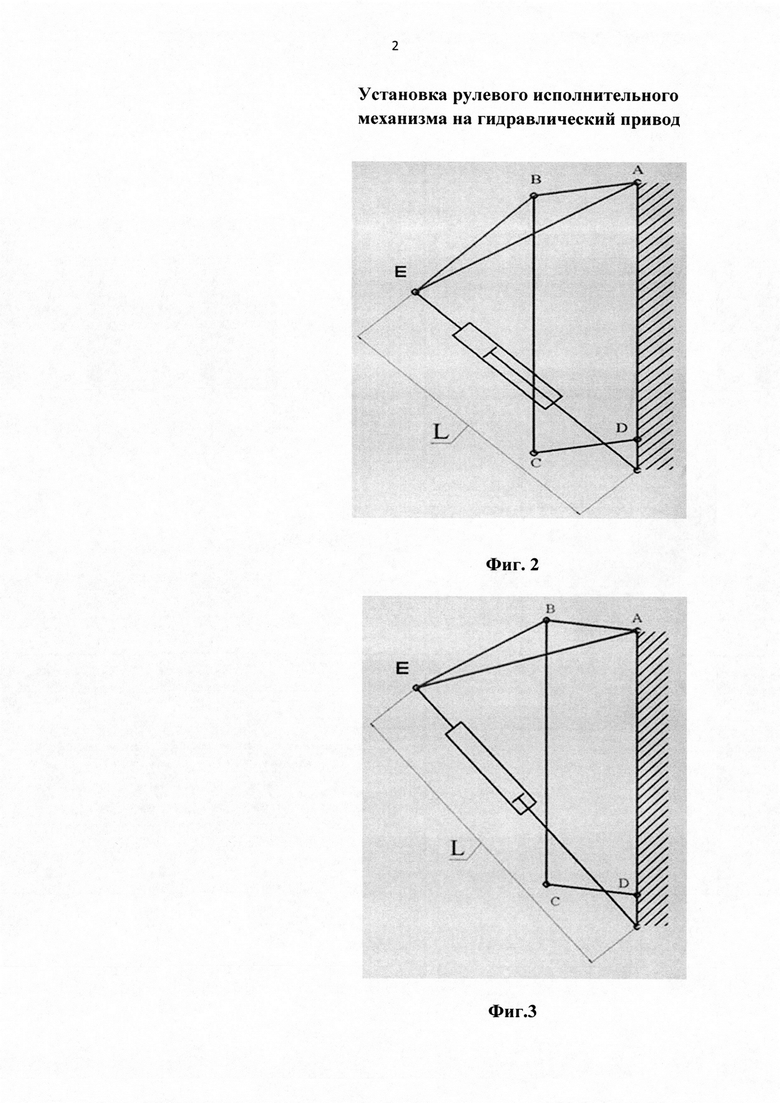
В установке рулевого исполнительного механизма можно выделить четырехзвенный механизм (фиг. 2 и 3), служащий для перемещения оболочки 2 гибкой тяги управления при работе рулевого исполнительного механизма, где фиг. 2 - рулевой исполнительный механизм втянут, фиг. 3 - выдвинут. На данных схемах условно не показаны: оболочка 2, наконечник 4, входная управляющая качалка 5 гидропривода 9 и внутренний стержень 10 гибкой тяги управления.
На схеме обозначено:
ΔABE - качалка 3;
АВ - расстояние между осью (А) качалки 3 на гидроприводе 9 и осью (В) установки на качалке 3 кронштейна 8;
ВС - кронштейн 8 с шарнирно установленной на нем оболочкой 2 гибкой тяги управления (оболочка 2 условно не показана);
CD - поводок 7, шарнирно закрепленный в узлах С и D;
AD - гидропривод 9 с закрепленным на нем кронштейном 6.
Качалка 3 выполнена таким образом, что ее сторона АВ и длина поводка 7, шарнирно закрепленной в узлах С и D, равны по величине и установлены параллельно, поэтому отклонение качалки 3 на неподвижном гидроприводе 9 с закрепленным на нем кронштейном 6, дает плоско-параллельное перемещение кронштейна 8 с шарнирно установленной на нем оболочкой 2 гибкой тяги управления.
Отклонения качалки 3 возможны только при изменении длины (при изменении положения штока) рулевого исполнительного механизма 1.
Разница между фиг. 2 и 3 - в положении штока рулевого исполнительного механизма.
Отличительной особенностью данной конструкции является приложение управляющего воздействия рулевого исполнительного механизма не к наконечнику стержня гибкой тяги, а к его оболочке.
Управление опорой оболочки гибкой тяги позволяет:
1. разместить рулевые исполнительные механизмы на последнем звене цепи механической проводки управления (для исключения отдачи перемещения на ручку управления);
2. сохранить заданный размер (длину) гибкой тяги управления;
3. сохранить необходимые для ее размещения прямые участки на концах (следует из общей компоновки вертолета).
Данное изобретение позволяет более компактно разместить гидромеханическую систему управления на летательном аппарате, не изменив ее технических характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДУБЛИРОВАННЫХ РУЛЕВЫХ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2021 |
|
RU2773301C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| СИСТЕМА ПУТЕВОГО УПРАВЛЕНИЯ ВЕРТОЛЕТА С РУЛЕВЫМ ВИНТОМ | 1983 |
|
SU1208721A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 1990 |
|
SU1826423A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ И РАЗДВИЖНАЯ ТЯГА ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2013 |
|
RU2527574C1 |
Изобретение относится к области авиации, в частности к конструкциям систем управления летательным аппаратом. Гидромеханическая система управления содержит гидроусилители, расположенные с трех сторон от автомата перекоса, рулевые исполнительные механизмы с тягами, механическую проводку управления, состоящую из тяг и качалок. Рулевые исполнительные механизмы установлены параллельно механической проводке управления, выполненной с применением гибких тяг. При действующем ручном управлении система улучшения устойчивости через рулевые механизмы управляет положением опор гибких тяг. Достигается возможность компактно разместить рулевые исполнительные механизмы в системе управления, исключая отдачу его перемещений на ручку управления. 3 ил.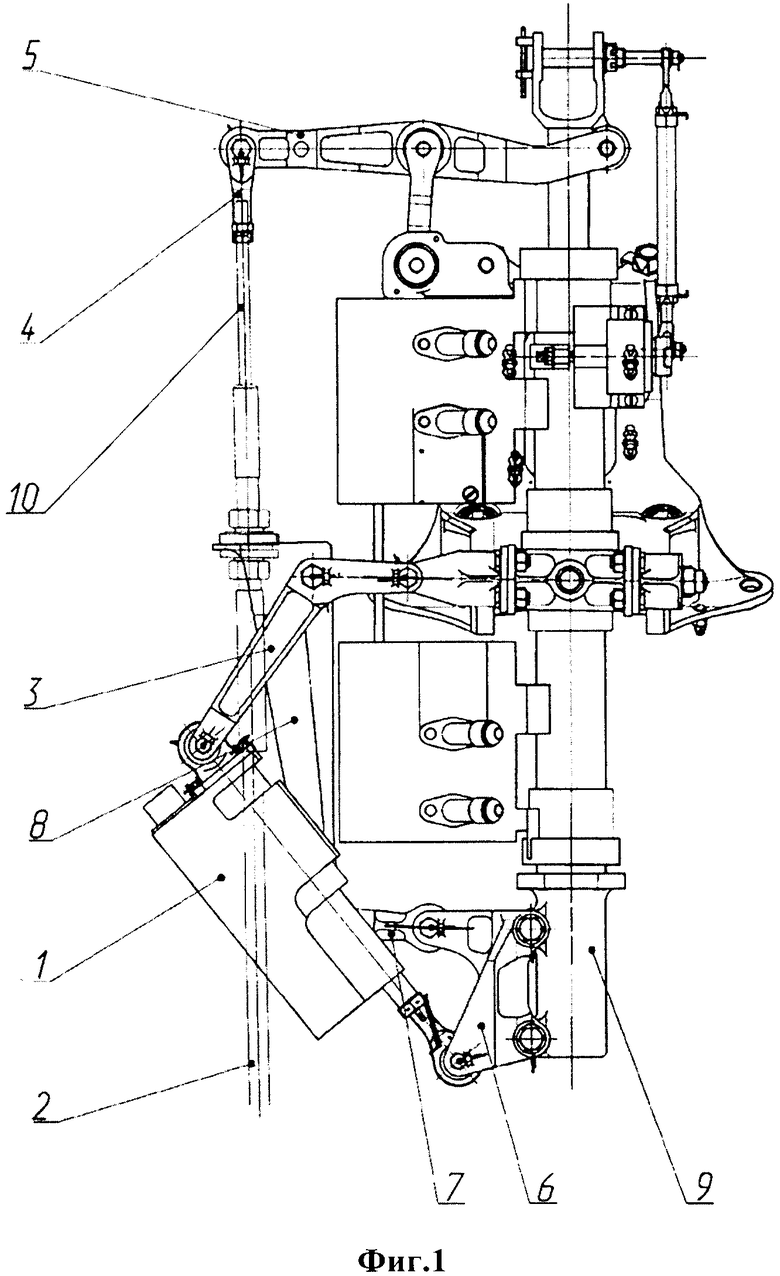
Гидромеханическая система управления, содержащая гидроусилители, расположенные с трех сторон от автомата перекоса, рулевые исполнительные механизмы с тягами, механическую проводку управления, состоящая из тяг и качалок, отличающаяся тем, что рулевые исполнительные механизмы установлены параллельно механической проводке управления, выполненной с применением гибких тяг, с возможностью управления положением опор оболочек гибких тяг.
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| US 2011046824 A1, 24.02.2011 | |||
| ВЕРТОЛЕТ | 1997 |
|
RU2123962C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |

