Изобретение относится к области авиационной техники и может быть использовано в любой отрасли машиностроения, а именно в системах управления с тросовой проводкой, работающей в условиях вибраций и перепада температур.
Известны устройства для натяжения тросов систем управления (регуляторы натяжения тросов), содержание корпус, пару качалок поворотно закрепленных на оси, каждая из которых снабжена роликом для троса, соединенного с управляющим органом, подпружиненную траверсу, подвижно установленную на штоке, и направляющую для траверсы (см. AIRBUS INDUSTRI А-310 ILLUSTRATED PARTS CATALOG 27-41-02, РАGЕ 7-0, JUN 30/83 FIGURE 7).
Однако и эти известные устройства также обладают целым рядом существенных недостатков.
При каждом перемещении летчиком задающего органа (штурвала или рычага управления) в ту и другую сторону траверса также синхронно меняет свое положение, т.е. качается от упора до упора в шток в обе стороны. Само качание траверсы есть паразитный люфт, который снижает точность работы системы. Величина этого люфта зависит от точности изготовления отверстия в траверсе и диаметра штока, а также от времени эксплуатации, т.к. качание траверсы от упора до упора в шток под нагрузкой приводит к нагартовке рабочих кромок траверсы и поверхности штока и истиранию этих поверхностей под действием движения перекошенной траверсы вдоль штока. Открытый механизм прототипа также способствует загрязнению рабочих поверхностей, их ускоренному износу и увеличению люфта, что сокращает ресурс и снижает точность регулятора. Кроме того, устройство имеет большое внутреннее трение, которое приводит к скачкообразному, грубому натяжению тросов, что также снижает точность системы. Объясняется это опять-таки скольжением вдоль штока перекошенной траверсы, открытостью механизма и его загрязнением, а также наличием большого числа деталей, которые участвуют в работе, т.е. трутся (это две пружины, две направляющие для них, две тяги, связывающие при помощи четырех шарнирное поворотные качалки с траверсой), и к тому же увеличивают габариты и вес. При этом отсутствует регулировка натяжения пружины, что исключает регулировку усилия натяжения тросов в параллельно работающих системах, а значит, ухудшает синхронность передачи несколькими системами единого значения угла установки рычага. Разное натяжение тросов дает разное провисание и деформацию троса, а значит, и разную точность. Открытость механизма ведет к попаданию посторонних предметов и снижает надежность его работы.
Задачей изобретения является уменьшение габаритов и веса, а также обеспечение плавного, равномерного и синхронного натяжения тросов в параллельно работающих системах.
Решение технической задачи обеспечивается тем, что устройство для натяжения тросов системы управления содержит корпус, на котором на оси закреплена пара качалок, снабженных роликом для троса для соединения управляющего и управляемого органов, шток, смонтированный в направляющей корпуса, и подпружиненную траверсу, подвижно установленную на упомянутом штоке, при этом оно снабжено регулятором натяжения пружины траверсы, установленным в нижней части штока, на штоке подвижно установлен подпружиненный ползун, контактирующий с упорами, выполненными на нижней опорной поверхности траверсы, при этом каждая из качалок снабжена опорным роликом, контактирующим с верхней поверхностью траверсы, причем последняя имеет паз для направляющей корпуса, а оси штока, ползуна и направляющей корпуса параллельны, причем регулятор натяжения включает в себя винт, установленный в нижней части корпуса в торцевой зоне штока, снабженного цилиндрическим хвостовиком и упором, выполненным в виде шайбы с диаметрально расположенными штифтами, размещенными в пазах штока, а шток выполнен полым, ступенчатым и снабжен торцевым фланцем на нижнем конце, кроме того, корпус выполнен полым и снабжен съемными крышками.
На фиг.1 изображен общий вид устройства для натяжения тросов системы управления.
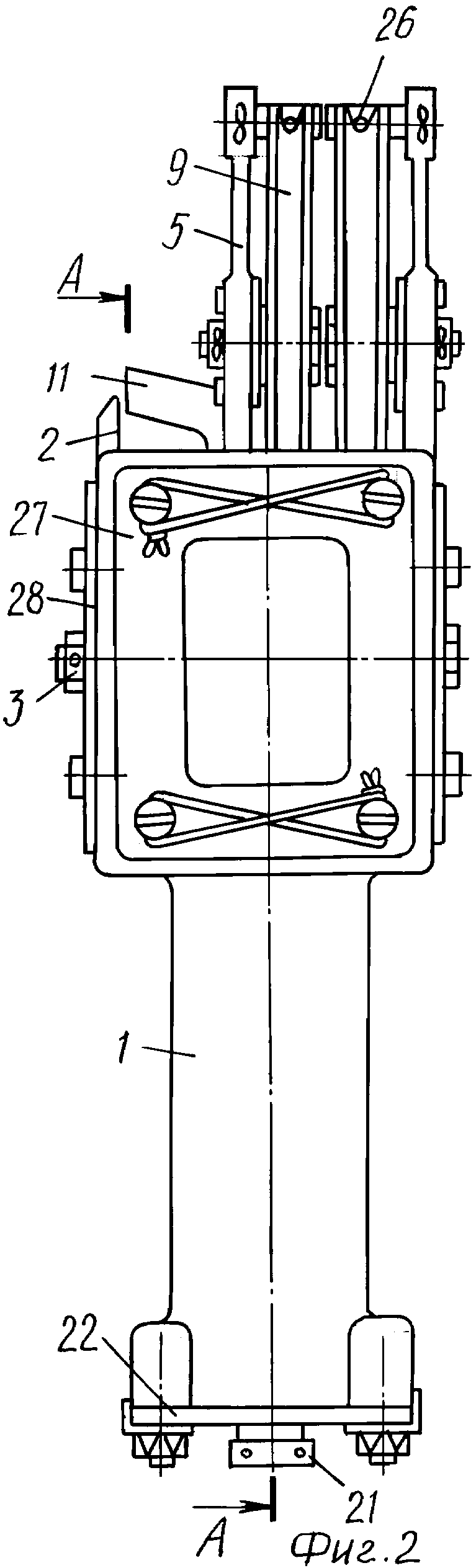
На фиг.2 - то же, вид слева.
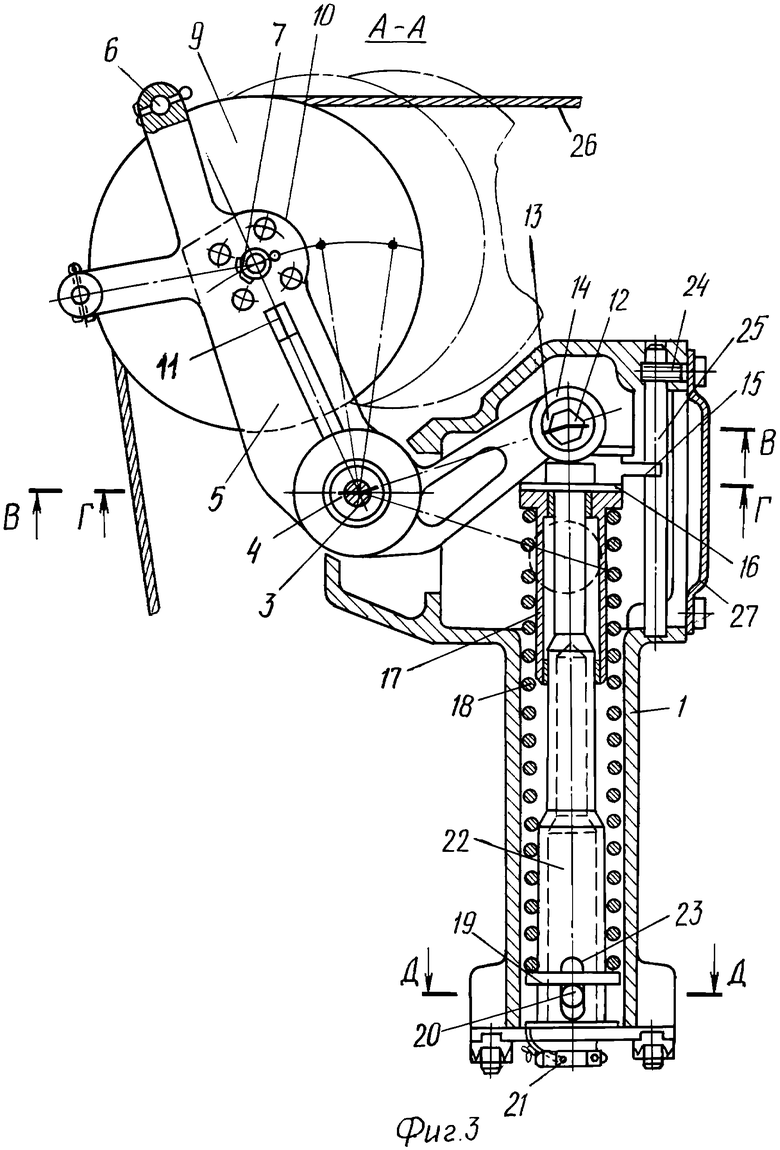
На фиг.3 - разрез А-А по фиг.2.
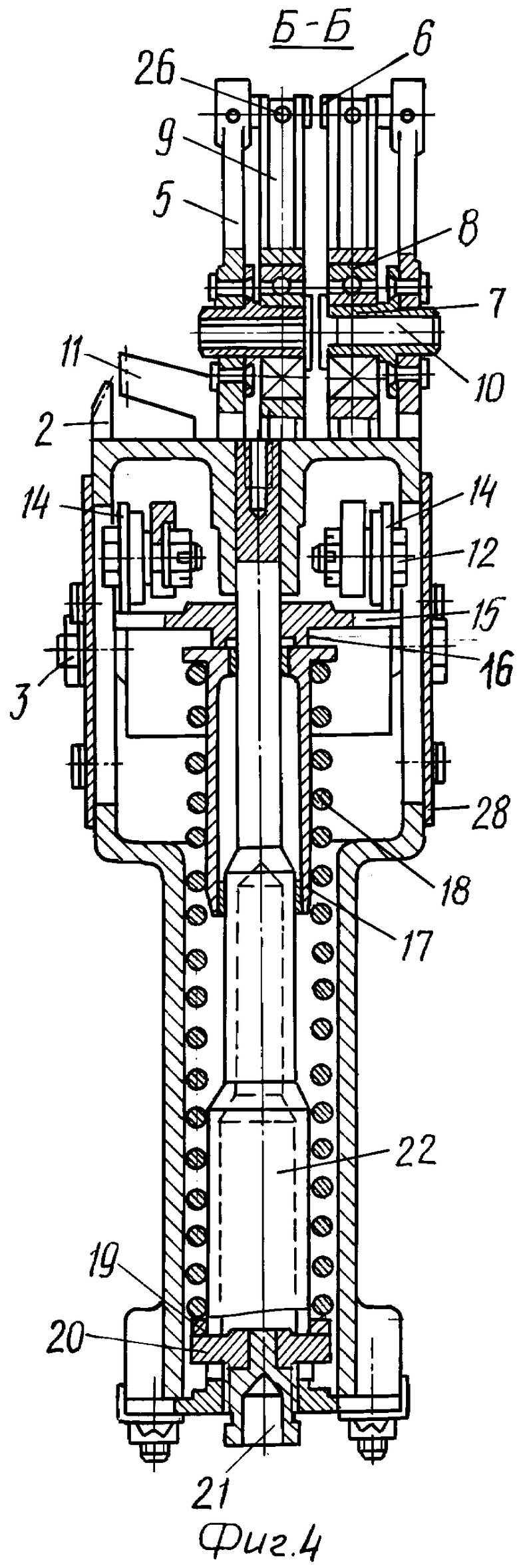
На фиг.4 - разрез Б-Б по фиг.1.
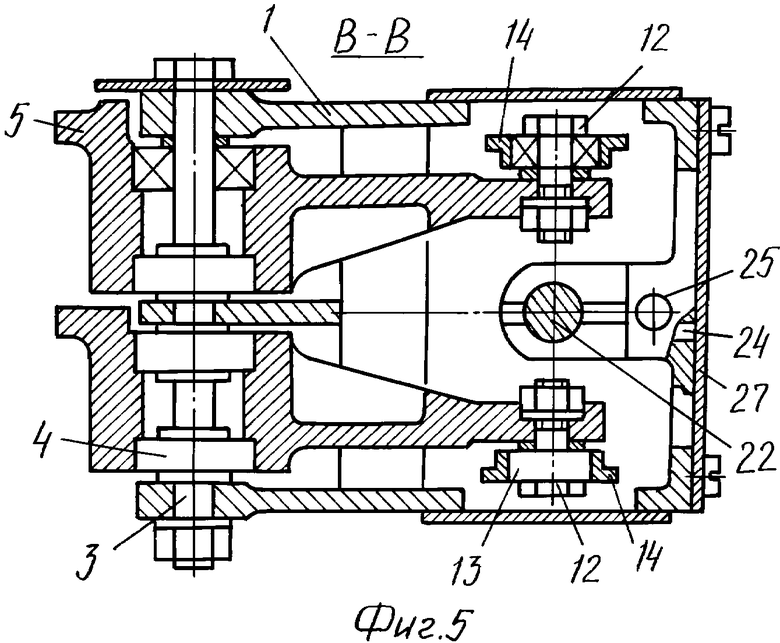
На фиг.5 - разрез В-В по фиг.3.
На фиг.6 - сечение Г-Г по фиг.3.
На фиг.7 - сечение Д-Д по фиг.3.
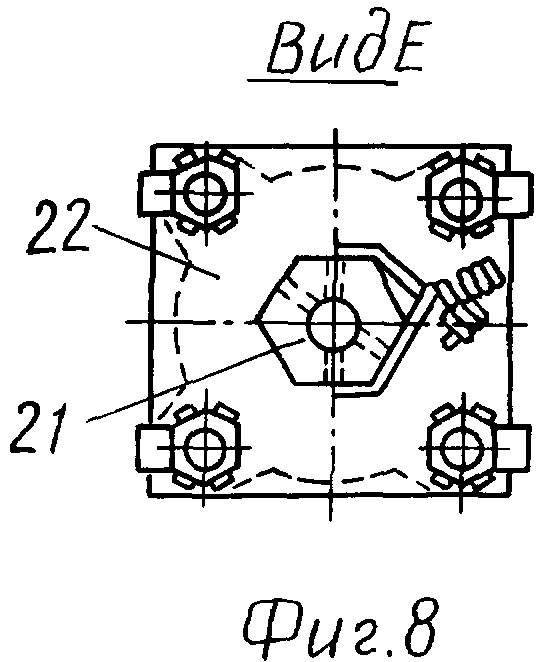
На фиг.8 - вид Е по фиг.1.
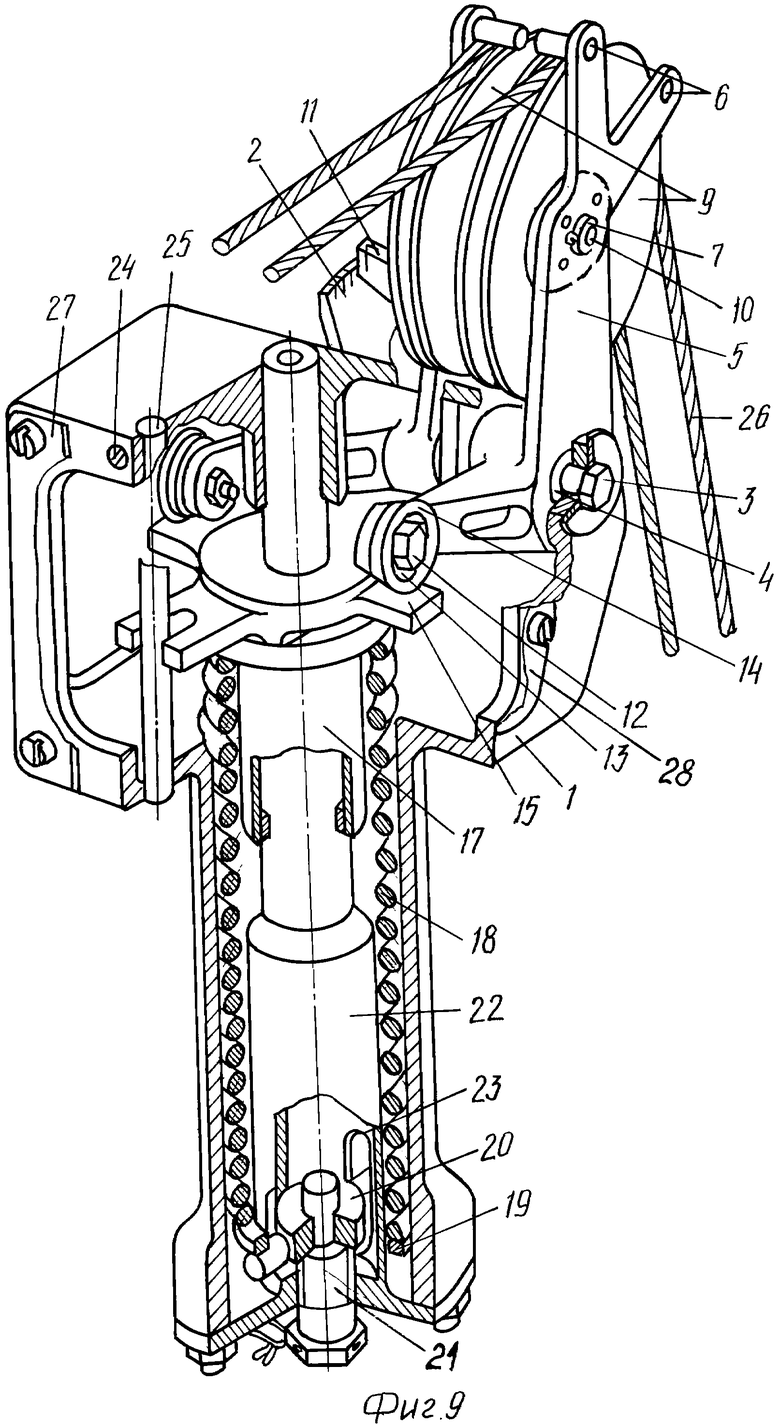
На фиг.9 - в изометрии изображен общий вид устройства для натяжения тросов системы управления.
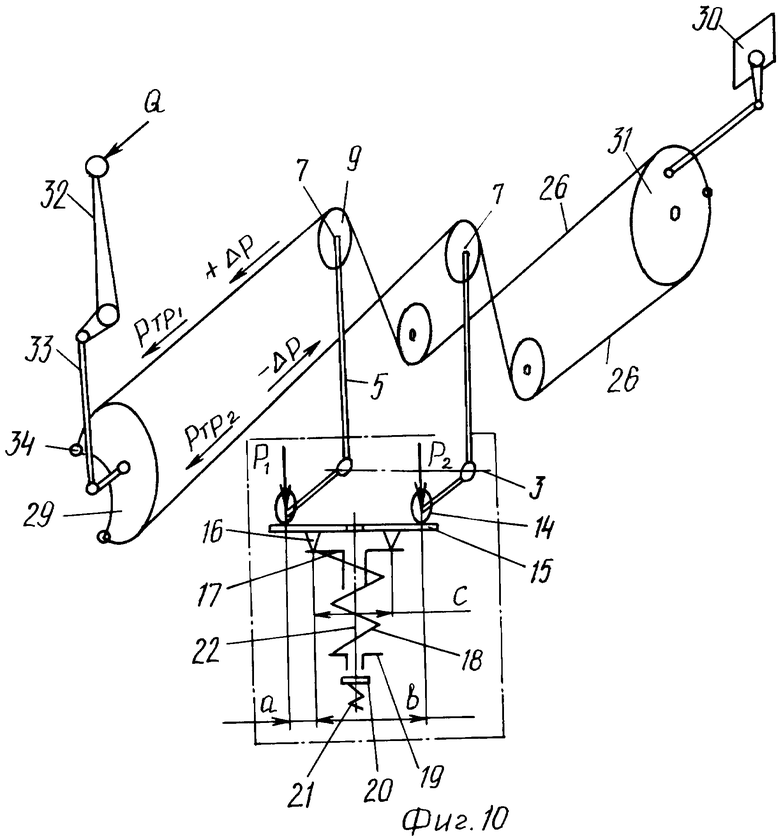
На фиг.10 изображена принципиальная схема устройства в системе управления двигателями.
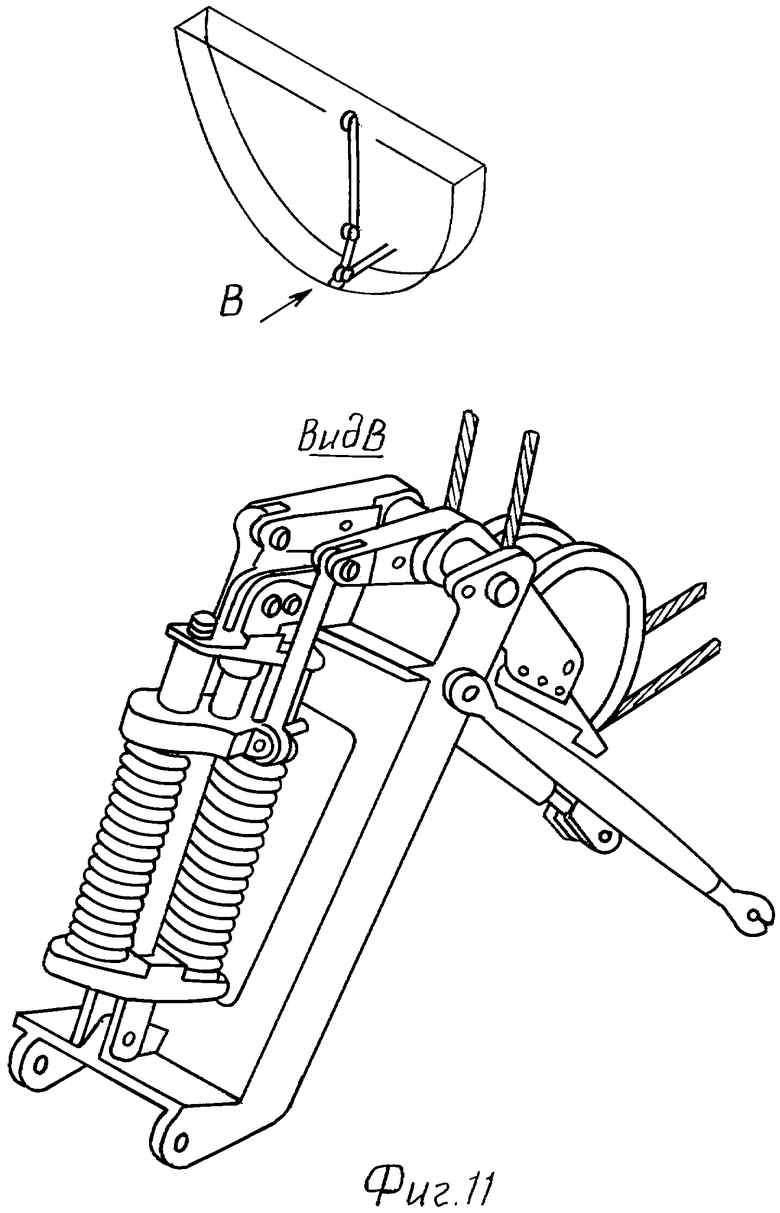
На фиг.11 изображен прототип.
Устройство для натяжения тросов системы управления содержит корпус 1 со шкалой 2, ось 3, на которой на шарикоподшипниках 4 установлены поворотные качалки 5. На наружных плечах качалок 5 установлены ограничители 6, приклепаны полуоси 7, на которых на шарикоподшипниках 8 установлены ролики 9, закрепленные винтами 10. На качалке 5 имеется указатель 11 с риской.
На внутренних плечах качалок 5 болтами 12 на шарикоподшипниках 13 закреплены опорные ролики 14, которые контактируют в противоположными концами траверсы 15. Траверса 15 своими опорами 16 контактирует с торцевой поверхностью ползуна 17, поджатого пружиной 18, которая посредством шайбы 19 опирается на концы подвижного упора 20, расположенного на гладком цилиндрическом хвостовике винтa 21, ввернутого в нижнюю торцевую часть полого штока 22, который своим фланцем неподвижно крепится на торцевой цилиндрической части корпуса 1. При этом концы подвижного упора 20 проходят через сквозные продолговатые пазы 23, расположенные также в нижней части штока 22. Внутри, на корпусе 1, винтом 24 неподвижно крепится направляющая 25, проходящая через паз траверсы 15. По канавкам ролика 9 проложены тросы 26. Верхнее и боковые окна корпуса 1 закрыты съемными крышками 27, 28. Тросы 26 связаны с управляющим роликом 29.
На принципиальной схеме (см. фиг.10) указан вариант выполнения устройства для натяжения тросов системы управления, где исполнительный механизм автомата тяги 30 подключен, например, к управляемому ролику 31. Рычаг 32 управления двигателем кинематически тягой 33 связан с управляющим роликом 29, который тросами 26, закрепленными на ролике 29, с помощью узлов крепления 34 связан с управляемым роликом 31.
Устройство для натяжения тросов системы управления работает следующим образом.
При температурных и аэродинамических деформациях планера летательного аппарата, когда замкнутая тросовая проводка не загружена силой перемещения командного органа, например рычага управления двигателем, оба троса 26 тянутся примерно одинаково с той лишь разницей, которая определяется трением между деталями внутри самой системы, препятствующими этому перемещению, а именно трение троса о ролик при наличии перекосов, сопротивление троса изгибу на роликах, трение качения в шарокоподшипниках роликов и качалок системы и т.п.
Эта разница в натяжении тросов 26 передается роликами 9 на качалки 5, которые опорными роликами 14 опираются непосредственно на противоположные концы траверсы 15. Данное обстоятельство поясняется следующим. Траверса 15, снабженная опорами, представляет собой как бы балку на двух опорах (см. фиг. 10), которая качнется тогда, когда момент
Р1 х а > Р2 х в, (1)
где сила, приложенная к тросу 

Ртр1=Ртр2 - усилие натяжения тросов до приложения нагрузки; дополнительная сила, приложенная к тросу от преодоления момента сопротивления проводки;
дополнительная сила, приложенная к тросу от преодоления момента сопротивления проводки; дополнительная сила, приложенная к тросу от преодоления момента сопротивления исполнительного органа;
дополнительная сила, приложенная к тросу от преодоления момента сопротивления исполнительного органа; дополнительная сила, приложенная к тросу от преодоления момента сопротивления, допустим, автомата тяги и т.д.;
дополнительная сила, приложенная к тросу от преодоления момента сопротивления, допустим, автомата тяги и т.д.;
п - коэффициент запаса.
Но до того, как эта балка, т.е. траверса, качнется, две качалки и траверса представляют собой как бы единую жесткую связь (качалку с двумя роликами), которая не сместится, пока P1 < 2 Ртр.
Объясняется это тем, что при приложении усилия к рычагу (cм. фиг.10) один трос нагружается дополнительной суммарной силой  а другой - на эту же величину разгружается Δp, но в сумме сила, действующая на пружину, остается прежней
а другой - на эту же величину разгружается Δp, но в сумме сила, действующая на пружину, остается прежней  что и до приложения силы к рычагу.
что и до приложения силы к рычагу.
Однако расстояние между опорами 16 подобрано так, что при взаимодействии моментов, возникающих от малых сил на концах траверсы 15 до этих опор 16, траверса 15 не перекосится, а следовательно, исключится паразитное трение от скольжения перекошенной траверсы вдоль штока и тем самым исключатся недотягивание тросов и скачки.
Когда же командный орган, например, рычаг управления двигателем, начинает перемещаться летчиком от приложенной к нему силы, то один из тросов натягивается больше другого и тот ослабевает. Эти усилия с тросов передаются посредством тех жe роликов 9, качалок 5 и опорных роликов 14 на противоположные концы траверсы 15 и при достижении разницы усилий больше расчетной траверса 15 перекосится и застопорится на штоке 22 за счет сил трения. С этого момента качалки 5 также стопорятся, а ролики 9, имея только вращение на полуосях 7, позволят тросам 26 передавать заданное летчиком угловое положение рычага управления двигателем от пульта до двигателя без искажения.
При снятии усилия перемещения с рычага управления двигателем на пульте на тросах 26 восстанавливается примерное равновесие, траверса 15 разблокируется и пружина 18 вновь будет поддерживать расчетное усилие натяжения тросов независимо от температуры и деформации планера летательного аппарата.
Равномерное натяжение тросов поддерживается устройством для натяжения тросов в системе управления автоматически путем оптимального выбора расположения оси 3, вращения качалок 5 относительно расположения тросов и оси пружины подбором пружины.
Синхронность натяжения тросов в параллельных системах обеспечивается при монтаже и регулировке системы путем перемещения подвижного упора 20 при вращении винта 21, а плавность - за счет снижения трения между деталями в устройстве путем сведения до необходимого минимума количества подвижных деталей, участвующих в работе, количества шарниров и перевода шарниров на шарикоподшипники, а также размещения деталей внутри полого закрытого корпуса, что не дает возможности попадания грязи и пыли.
Использование изобретения позволяет обеспечивать плавное равномерное и синхронное натяжение тросов в параллельно работающих системах, сокращает габариты и вес, а также повышает надежность работы устройства и системы в целом.


Изобретение относится к области авиационной техники. Устройство для натяжения тросов системы управления содержит корпус 1 со шкалой 2, ось 3, на которой на шарикоподшипниках установлены поворотные качалки 5. На наружных плечах качалок 5 установлены ограничители 6, приклепаны полуоси 7, на которых на шарикоподшипниках установлены ролики 9, закрепленные винтами 10. На качалке 5 имеется указатель 11 с риской. На внутренних плечах качалок 5 болтами на шарикоподшипниках закреплены опорные ролики, которые контактируют с противоположными концами траверсы, опоры которой поджаты к торцевой поверхности ползуна пружиной, которая посредством шайбы опирается на концы подвижного упора, расположенного на гладком цилиндрическом хвостовике винта, ввернутого в нижнюю торцевую часть полого штока 22, который своим фланцем неподвижно крепится на торцевой цилиндрической части корпуса 1. Концы подвижного упора проходят через сквозные продолговатые пазы, расположенные также в нижней части штока. Внутри на корпусе 1 винтом неподвижно крепится направляющая, проходящая через паз траверсы. По канавкам ролика 9 проложены тросы 26. Верхнее и боковые окна корпуса 1 закрыты съемными крышками 27, 28. Изобретение направлено на уменьшение габаритов и веса в параллельно работающих системах. 3 з.п. ф-лы, 11 ил.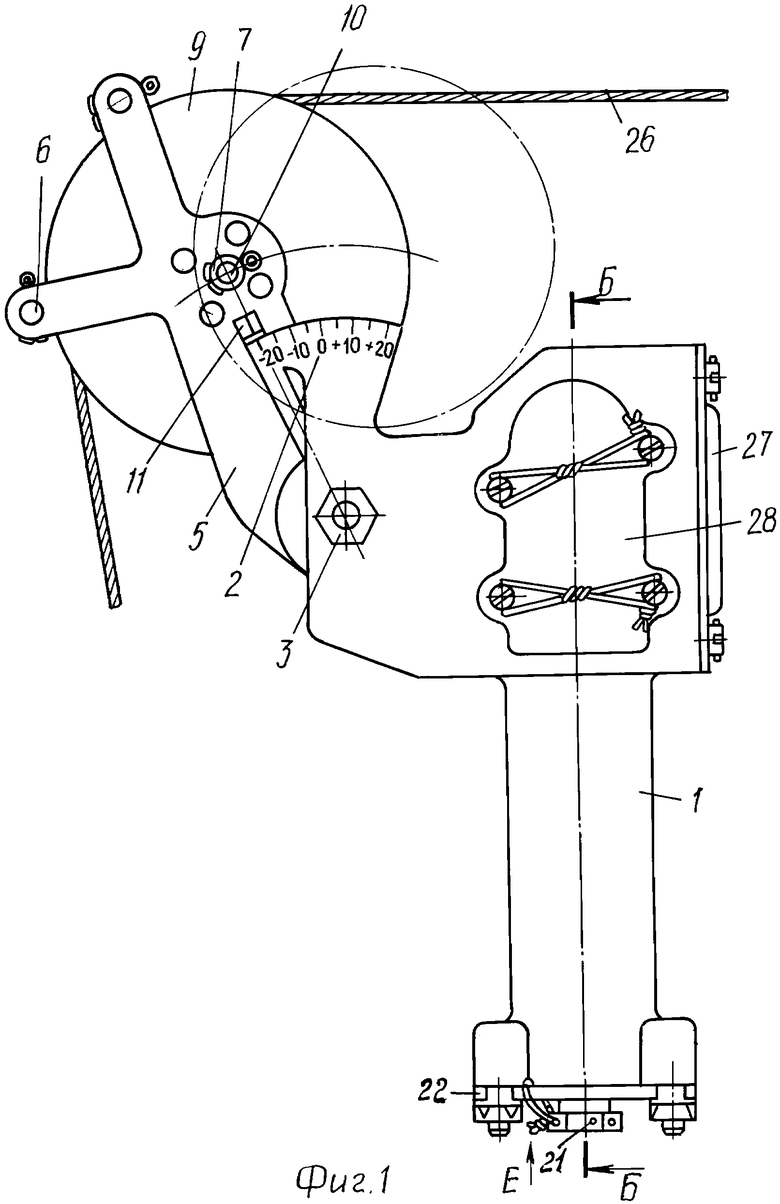
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
| Illustrated parts catalog | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| СОЮЗНАЯ - ' ; "У'МЦ'^Т - ; | 0 |
|
SU373207A1 |
| US 4192476 A, 11.03.1980 | |||
| УСТРОЙСТВО ДЛЯ МАГНИТНОЙ ДЕФЕКТОСКОПИИ ОДНОТИПНЫХ ИЗДЕЛИЙ | 0 |
|
SU263247A1 |

