I
Изобретение касается неразрушающего контроля, и может найти ишрокое применение при дефектоскопии, толщино-метрии, коттроле напряженного состояния, а также для определения параметров материала (плотность, диэлектрическая проницаемость) изделий типа тел вращения.
Известны электромагнитнью дефектоскопы, предназначенные для контроля плоских изделий, содержащие излучатели и приемники колебаний, системы обработки и вывода информащ1и, при помощи спирального сканирования 1 .
Однако для контроля изделий типа трехмерных тел вращения данные дефектоскопы неприменимы, так как не имеют развертки по треть- jj. ей координате.
Наиболее близким по технической сущности и достигаемому результату к изобретению является электромагнитный дефектоскоп, содержащий приемно-излучающий узел, механически jj связанную с ним сканирующую систему, включающую вал с узлом установки контролируемого изделия и двигатель для вращения вала, систему памято, связанную через блок синхронизации со сканирующей системой, и телевизионный индикатор 2.
Однако известный дефектоскоп не может быть использован для контроля теЛ вращения со сложной конфигурацией, в дефектоскопе отсутствует коордршатная пр1гвязка дефектов, что делает невозможным их точное нахождение на изделии.
Целью изобретения является розможность контроля изделий типа тел вращения и повышение производительности.
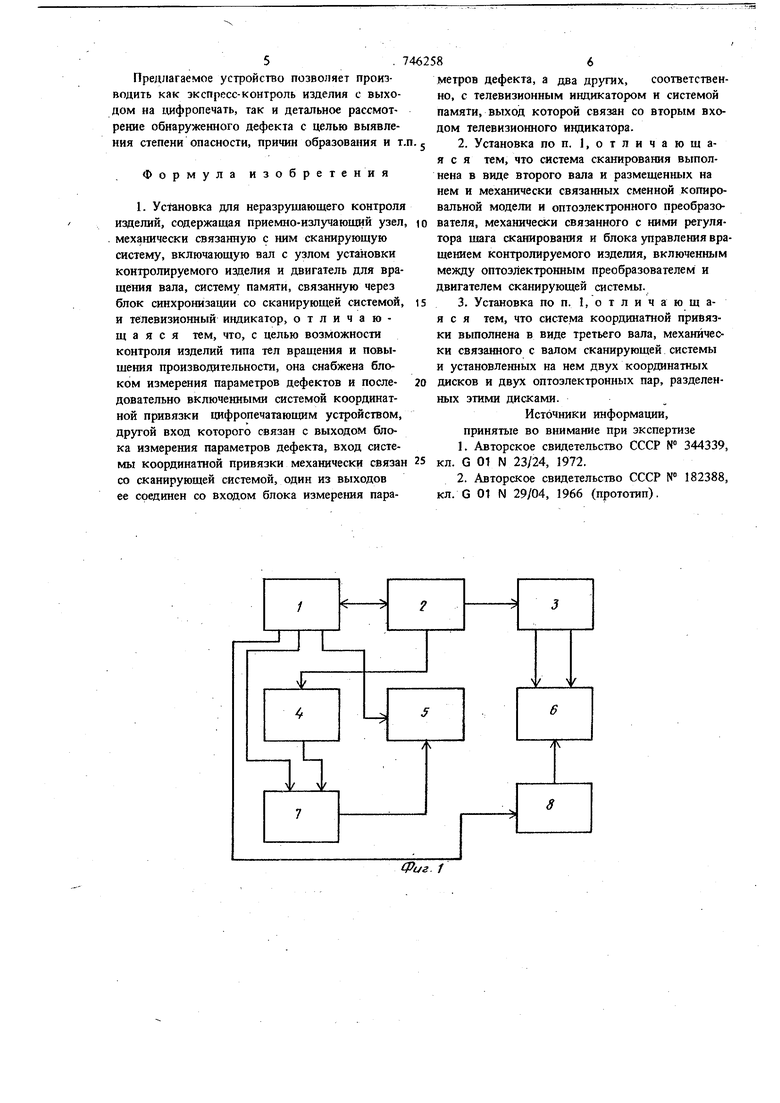
Это достигается тем, что предлагаемая установка снабжена блоком измерения параметров дефектов и последовательно включенными системой координатной привязки и Щ1фропечатающим устройством, другой вход которого связан с выходом блока измерения параметров дефекта, вход системы координатной привязки механически связан со канирующей агстемой, один из выходов ее соединен со входом . блока измерения параметров дефекта, а два друito, соответственно, с телсвизионньпи индикатором и системой памяти, выход которой связан со вторым входом телевизионного индикатора.
Кроме того, система сканирования выполнена в ввде второго вала и разме1це1тых на нем и механически связанных сменной копировальной модели и оптоэяектронного преобразователя, механически связанного с ними регулятора шага сканирования и блока управления вращением контролируемого изделия, включенным между оптоэлек тронным преобразователем и двигателем сканирующей системы. При этом система координатной привязки выполнена в виде третьего вала, механически связанного с валом сканирующей системы и установленных на нем двух координатных дисков и двух оптоэлектроннытгпар. разделенных этими дисками.
На фиг. 1 представлена структурная схема устройства, на фиг. 2 - вариант выполнения устройства.
Устройство содержит приемно-изпучателы1ый узел 1, механическую сканирующую систему 2, блок 3 координатной привязки, блок 4 сиихронизащ1и, телевизионный индикатор 5, цифропечатающее устройство 6, систему 7 памяти и блок 8 измерения параметров дефектов.
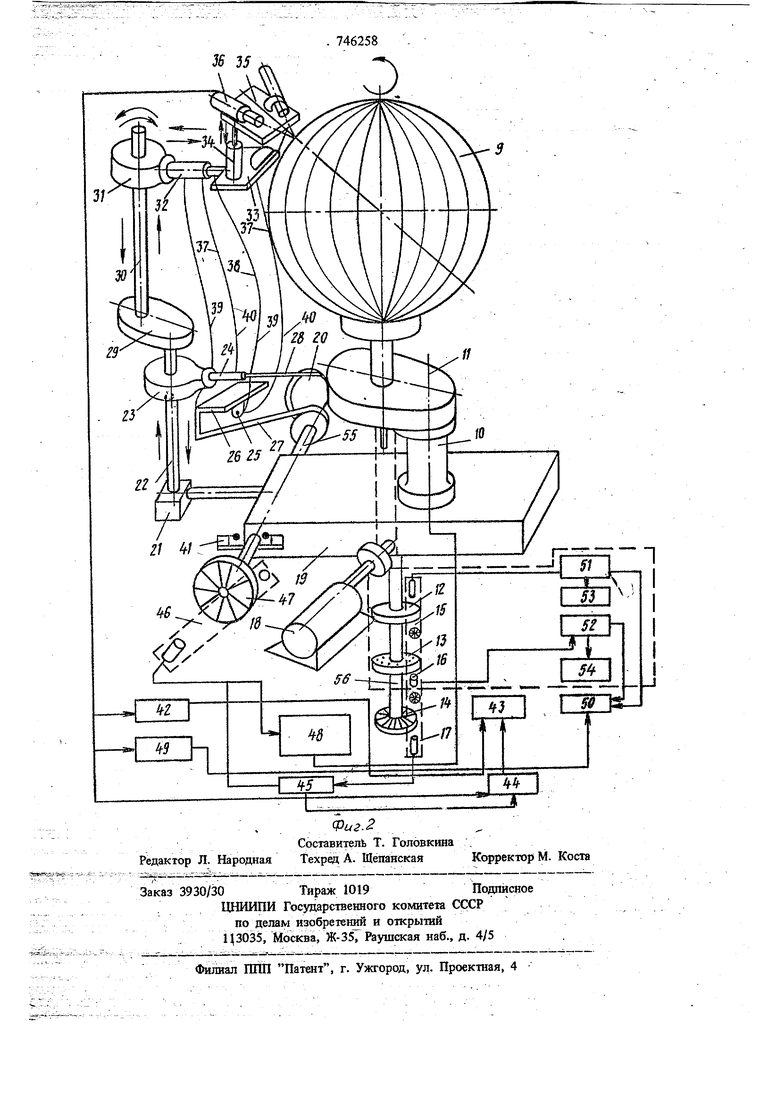
Установка состоит из системы 9 вращения исследуемого объекта, двигателя 10, редуктора 11, системы Координатной привязки, состоящей из координатных дисков 12 и 13, диска 14 с переменной оптической плотностью, оптоэлектронных пар 15-17, двигателя 18, блока управления 19 приемно-излучательным узлом блока 20 копировальных моделей, конического редуктора 21, винта 22, гайки 23, управляющего гидроцилиндра 24 формообраэукмдей управляющего гидроцилиндра 25 нормалеобразующей Кроме того устройство состоит из спецплощадки 26, штанги 27, штока 28, редуктора 29, винта 30, гайки 31, рабочего гидроцилиндра 32 формообразующей, площадки 33, рабочего гидроцилиндра. 34 нормалеобразующей, опоры 35, датчиков 36, всасьгеающих 37 и нагнетательных 38 резиновых кордирова)шых ишангов устройства 39 регулировки и устройства 40 стабилизации давления, концевого выключателя 41, блока обработки первичного сигнала 42, телевизионного индикатора 43, блока памяти 44, блока 45 синхронизации, оптозлектронной пары 46, диска 47 с переменной оптической плотностью, блока 48 управления двигателем, блока 49 измерения параметров дефектов, цифропечатающего устройства 50, счетчиков 51 и 52 и цифровых индикаторов 53 и 54.
Позициями 55 и 56 (см. фиг. 2) обозначены. соответственно второй и третий валы. Установка работает следующим образом. При контроле объекта на сканирующей системе 2 полезный ситал от излучатепьно-приемного тракта поступает на блок 8 измерения параметров дефектов и затем - на цифропеча тающее устройство 6. Параллельно на цифропечатающее устройство 6 поступают сигналы от блока 3 координатной привязки. С редуктором
11жестко связана система координатной привязки 1, состояц{ей из оптоэлектронных пар 15 и 16, разделенных координатными дисками
12и 13, установленными на третьем валу 56. Координатный диск 12 представляет собой
диск с щелевой прорезью, один оборот диска позволяет получить на выходе оптоэлектронной пары импульс, свидетельствующий о прохождении одной строки контролируемого изделия.
Координатный диск 13 представляет собой диск с равномерно расположенными по средней окружности отверстиями, количестко которых рассчитьшается по формуле:
п i m
(1)
где Е - длина строки исследуемого объекта;
m - линейный размер поля зрения приемного датчика.
Данный диск разделяет оптозлектронную пару 16, на выходе которой образуется серия импульсов, количество которых информация о положении исследуемой точки на изделии при контроле определенной строки. Сигналы с оптоэлектронных пар 15 и 16 поступают на счетчики 51 и 52 и отображаются нацифровых индикаторах 53 и 54. Причем каждый новый строчный импульс сбрасывает на нуль показания счетчика квантования координаты по строке.
Таким образом, цифропечатающее устройств выводит информацию в цифровой форме о параметрах и координатах обнаруженных дефектов.
В случае необходимости визуального наблюдения дефектных зон сигнал подается на телевизиогшый индикатор 5. В случае необходимости съема интегральной информации с определенной облаете изделия сигнал от приемно-излучательного узла 1 поступает на систему памяти, которая может быть выполнена в виде последовательно включенного блока 4 синхронизации и блока 7 памяти. Суммарная картина внуреннего состояния контролируемого изделия воспроизводится на телевизионном индикаторе
Сканирующая система установки вьшолнена в виде сменно-копирной модели 20, оптозлектронного преобразователя 46, 47, установленных на втором валу 55, и регулятора 19 щага сканирования. Блок 48 управления вращением изделия включен меаду оптоэлектронным преобразователем 46, 47 и двигателем 10 сканирующей системы, что позволяет осуществлять стабилизацию линейной скорости любой точки изделия относительно приемно-излучающего узла.
Предлагаемое устройство позволяет произодить как экспресс-контроль изделия с выхоом на цифропечать, так и детальиое рассмотение обнаруженного дефекта с целью выявлеия степени опасности, причин образования и т.п..
Формула изобретения
1. Устаиовка для неразрушающего контроля изделий, содержащая приемно-излучающий узел, ю механически связанную с ним сканирующую систему, включающую вал с узлом установки контролируемого изделия и двигатель для вращения вала, систему памяти, связанную через блок синхронизащти со сканирующей системой, is и телевизионный индикатор, отличающаяся тем, что, с целью возможности контроля изделий типа тел вращения и повыщения производительности, она снабжена блоком измерения параметров дефектов и после- 20 довательно включенными системой координатной привязки цифропечатающим устройством, другой вход которого связан с выходом блока измерения параметров дефекта, вход системы координатной привязки механически связан 25 со сканирующей системой, один из выходов ее соединен со входом блока измерения параметров дефекта, а два других, соответственно, с телевизионным индикатором и системой памяти, выход которой связан со вторым входом телевизионного индикатора.
2.Установка по п. 1, о т л и ч а ю щ ая с я тем, что система сканирования выполнена в виде второго вала и размещенных на нем и механически связанных сменной копировальной модели и оптоэлектронного преобразователя, механически связанного с ними регулятора шага сканирования и блока управления вращением контролируемого изделия, включенным между оптоэлектронным преобразователем и двигателем сканирующей системы.
3.Установка по п. I, о т л и ч а ю щ ая с я тем, что система координатной привязки выполнена в виде третьего вала, механически связанного с валом сканирующей системы и установленных на нем двух координатных дисков и двух оптозлектронных пар, разделенных зтими дисками.
Источники информащш, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 344339, кл. G 01 N 23/24, 1972.
2.Авторское свидетельство СССР № 182388, кл. G 01 N 29/04, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1999 |
|
RU2180111C2 |
| СПОСОБ КОНТРОЛЯ НЕГАБАРИТНОСТИ РАЗМЕЩЕНИЯ ОБОРУДОВАНИЯ В ТУННЕЛЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2456544C2 |
| Способ контроля полых изделий цилиндрической формы и устройство для его осуществления | 1989 |
|
SU1714343A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ИЗДЕЛИЙ СЛОЖНОЙ КОНСТРУКЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2812233C1 |
| Способ неразрушающего контроля ферромагнитных изделий | 1989 |
|
SU1651190A1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373325C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| СПОСОБ НАСТРОЙКИ УЛЬТРАЗВУКОВЫХ ДЕФЕКТОСКОПОВ | 2008 |
|
RU2378645C1 |