Изобретение относится к системам автоматического управления электроприводом транспортера и является усовершенствованием изобретения по авт. св. № 630159.
Цель изобретения - повышение надеж- ности управления.
На фиг. 1 приведена функциональная схема устройства управления электроприводом транспортера; на фиг. 2 - функциональная схема блока управления; на фиг.
3- функциональная схема блока контроля цепи.
Предлагаемое устройство управления электроприводом транспортера содержит программный блок 1, блок 2 защиты от перегрузок, блок 3 управления, блок 4 контроля цепи 5, датчик 6 контроля натяжения цепи 5, датчик 7 контроля состояния цепи 5, элементы ИЛИ 8, И-НЕ9,И 10, усилитель 11 и индикатор 12, причем первый и второй выходы программного блока 1 соединены с первым и вторым входами блока 3 управления соответственно, третий вход которого соединен с выходом блока 2 защиты от перегрузок, четвертый вход - с выходом блока
4контроля цепи 5, первый вход которого соединен с выходом блока 3 управления, второй вход подключен к выходу датчика 6 контроля натяжения цепи 5, выходы датчика
7 контроля состояния цепи 5 подключены к входам элементов ИЛИ 8 и И-НЕ 9, выход элемента ИЛИ 8 соединен с первым входом элемента И 10 и с третьим входом блока 4 контроля цепи 5, выход элемента И-НЕ 9 соединен с вторым входом элемента И 10. Датчик 7 контроля состояния цепи 5 содержит п чувствительных элементов (где п - заранее заданное число последовательно отсутствующих скребков 13 на цепи 5), расположенных с шагом ш (где - принятый шаг размещения скребков 13 на цепи 5) вдоль цепи 5.
Блок 3 управления содержит элементы И 14, ИЛИ 15, триггер 16, усилитель 17, реле 18, при этом первый вход блока 3 соединен с первым входом элемента И 14, выход которого соединен с третьим входом элемента ИЛИ 15, третий и четвертый входы блока 3 соединены соответственно с первым и третьим входами элемента ИЛИ 15, выход которого соединен с вторым (установочным) входом триггера 16, первый вход которого соединен с вторым входом блока 3 управления, выход триггера 16 соединен с вторым входом элемента И 14, с входом усилителя 17 и является выходом блока 3 управления, выход усилителя 17 соединен с реле 18.
Блок 4 контроля цепи 5 содержит триггеры 19 и 20, элементы и 21 и 22, элементы 23 и 24 задержки и элемент ИЛИ 25, усилитель
26, элемент 27 сигнализации, причем первый вход блока 4 контроля цепи 5 соединен с вторыми входами элементов И 21 и 22, выходы которых соединены соответственно с входами элементов 23 и 24 задержки, второй вход блока 4 контроля соединен с вторым входом элемента ИЛИ 25, первый и третий входы которого соединены соответственно с выходами элементов 23 и 24 задержки, третий вход блока 4 контроля соединен с входом триггера 19, единичный и нулевой выходы которого соединены с первыми входами элементов И 21 и 22 соответственно, выход элемента 25 ИЛИ соединен с входом триггера 20, выход которого соединен через усилитель 26 с элементом 27 сигнализации, являющимся выходом блока 4 контроля.
Устройство управлс ния электроприводом транспортера работает следующим образом.
Программный блок 1 выдает с второго выхода в заданное время сигнал запуска, проходящий через второй вход блока 3 управления на триггер 16. Последний перебрасывается и срабатывают усилитель 17 и реле 18, включающее электродвигатель транспортера (не показан). Одновременно сигнал с выхода триггера 16 поступает на второй вход элемента И 14 и через выход блока 3 управления и через первый вход блока 4 контроля цепи на вторые входы элементов И 21 и 22 При работе транспортера его скребки 13 воздействуют на чувствительные элементы датчика 7 контроля состояния цепи 5. При этом, если количество последовательно отсутствующих скребков 13 меньше числа п, то при нахождении хотя бы одного скребка 13 напротив одного из чувствительных элементов датчика 7 на выходе соответствующего чувствительного элемента (т.е. на соответствующем выходе датчика 7 контроля состояния цепи 5) появляется импульс, проходящий через элемент ИЛИ 8 и третий вход блока 4 контроля на триггер 19. с выходов которого импульсы поступают на первые входы элементов И 21 и 22 и соответственно поочередно подаются импульсы на элементы 23 и 24 задержки, которые настроены на время больше периода поступления импульсов, и при нормальной скорости движения цепи 5 и количестве последовательно отсутствующих скребках 13 меньше п элементы 23 и 24 задержки не выдают импульсы на соответствующие входы элемента ИЛИ 25.
При уменьшении скорости движения цепи 5, например при обрыве цепи 5, либо при количестве последовательно отсутствующих скребков 13 больше п срабатывает
один из элементов 23, 24 задержки, сигнал с которого проходит через элемент ИЛИ 25. триггер 20 перебрасывается, срабатывает усилитель 26 и загорается элемент 27 сигнализации Цепь неисправна. Одновременно сигнал с выхода триггера 20 поступает через выход блока 4 контроля и четвертый вход блока 3 управления на третий вход элемента ИЛИ 15, при этом триггер 16 перебрасывается в исходное состояние, отключая через усилитель 17 и реле 18 электродвигатель транспортера.
При ослаблении цепи 5 срабатывает датчик 6, выходной сигнал которого через второй вход блока 4 контроля поступает на второй вход элемента ИЛИ 25 и далее происходит остановка электродвигателя и загорается элемент 27 сигнализации.
При перегрузке электродвигателя транспортера с выхода блока 2 защиты через третий вход блока 3 управления на первый вход элемента ИЛИ 15 поступает сигнал и электродвигатель отключается.
При нормальной работе транспортера (т.е. при сигнале на выходе триггера 16 блока 3 управления) через заданный промежуток времен с первого выхода программного блока 1 поступает сигнал останова, проходящий через первый вход блока 3 управления, элемент И 14 на второй
вход элемента ИЛИ 15 и электродвигатель останавливается.
При сигнале с выхода элемента ИЛИ 8 и наличии сигнала на выходе элемента И-НЕ
5 9 появляется сигнал на выходе элемента И 10, проходящий усилитель 11, при этом загорается индикатор 12 Обрыв скребка. На выходе элемента И 10 сигнал появляется, если из п скребков 13, которые должны на0 ходиться перед датчиком 7, нет хотя бы одного скребка 13 (так как при сигнале с выхода элемента ИЛИ 8, сигнал появляется на выходе элемента И-НЕ 9, если хотя бы на выходе одного из чувствительных элемен5 тов датчика 7 нет сигнала).
Формула изобретения Устройство управления электроприво- дом транспортера по авт. св. № 630159, от0 личающееся тем, что, с целью повышения надежности, оно снабжено элементами ИЛИ, И-НБ, И, усилителем и индикатором, при этом датчик контроля состояния цепи, выполненный из п чувствительных элемен5 тов. подключен к входам элементов ИЛИ и И-НЕ, выход элемента ИЛИ соединен с триггером блока контроля цепи и первым входом элемента И, с вторым входом которого соединен выход элемента И-НЕ, выход эле0 мента И подключен через усилитель к индикатору.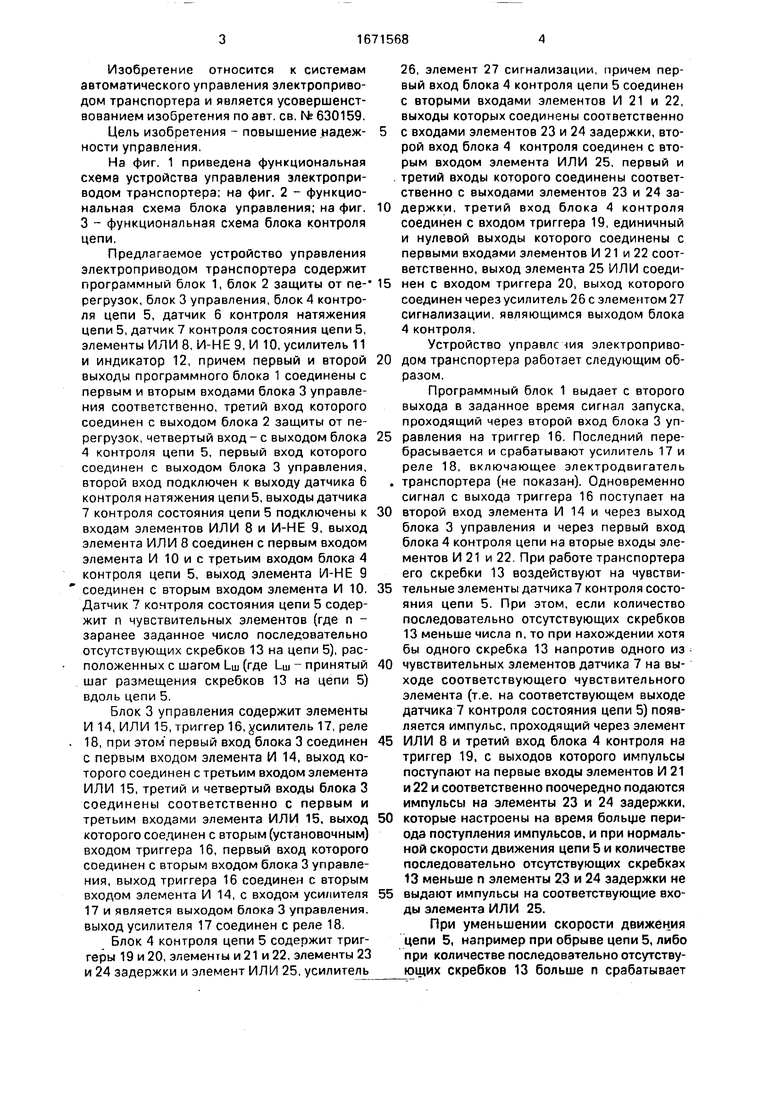

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом транспортера | 1977 |
|
SU630159A1 |
| Устройство для раздачи корма | 1990 |
|
SU1692435A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство для счета листов,укладываемых в стопу | 1983 |
|
SU1091197A1 |
| Электропривод | 1986 |
|
SU1417151A1 |
| АЭРОЗОЛЬНАЯ МОБИЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2180273C1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Регулируемый электропривод угольного комбайна | 1986 |
|
SU1355706A1 |
| Устройство для автоматического пуска и остановки электродвигателя телеграфного аппарата | 1986 |
|
SU1324119A1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1994 |
|
RU2090175C1 |
Изобретение относится к автоматическому управлению электроприводом транспортера. Цель - повышение надежности управления. Устр-во содержит программный блок 1, блок 2 защиты от перегрузок, блок управления (БУ) 3, блок контроля (БК) 4 цепи 5, датчики контроля (ДК) натяжения 6 и состояния 7 цепи 5, элементы ИЛИ 8, И-НЕ 9, И 10, усилитель 11 и индикатор 12. Причем ДК 7 выполнен из N чувствительных элементов и подключен к входам элементов ИЛИ 8 и И-НЕ 9, выход элемента ИЛИ соединен с входом БК 4 и первым входом элемента И 10, с вторым входом которого связан выход элемента И-НЕ 9. Выход элемента И 10 подключен через усилитель 11 к индикатору 12. При работе транспортера его скребки 13 воздействуют на чувствительные элементы ДК 7. При этом на выходе ДК 7 появляется импульс, проходящий через элемент ИЛИ 8 на вход БК 4, на отключение электродвигателя (ЭД) транспортера. При ослаблении цепи 5 срабатывает ДК 6, выходной сигнал которого через БК 4 поступает на БУ 3, по сигналу которого происходит остановка ЭД и загорается элемент сигнализации. При перегрузке ЭД транспортера с выхода блока 2 защиты через БУ 3 поступает сигнал на отключение ЭД. При нормальной работе транспортера через заданный промежуток времени с выхода блока 1 поступает сигнал останова, проходящий через БУ 3 на ЭД. При сигнале с выхода элемента ИЛИ 8 и наличии сигнала на выходе элемента И-НЕ 9 появляется сигнал на выходе элемента И 10, проходящий через усилитель 11. При этом загорается индикатор 12 "Обрыв скребка". 3 ил.
| Устройство управления электроприводом транспортера | 1977 |
|
SU630159A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
