1
Изобретение относится к системам автоматического управления электроприводом транспортера.
Известно устройство управления электроприводом транспортера, содерл ащее блок управления, включающий схему И и триггер, блок защиты и исполнительный элемент 1.
Недостатком известной системы является невысокая точность унравления и отсутствне защиты iipn ослаблении натяжения пепи транспортера, что снижает надежность его работы.
С целью повышения точности управления и надежности работы в устройство введен программный блок и блок контроля цепи, включающий датчики, схему ИЛИ и триггер, причем программный блок соединен со входом схемы И и триггером блока управления, выход одного датчика контроля цепи подключен ко входу схемы ИЛИ блока контроля цепи, а другого - к триггеру этого же блока.
На чертеже представлена принципиальная схема предлагаемого устройства.
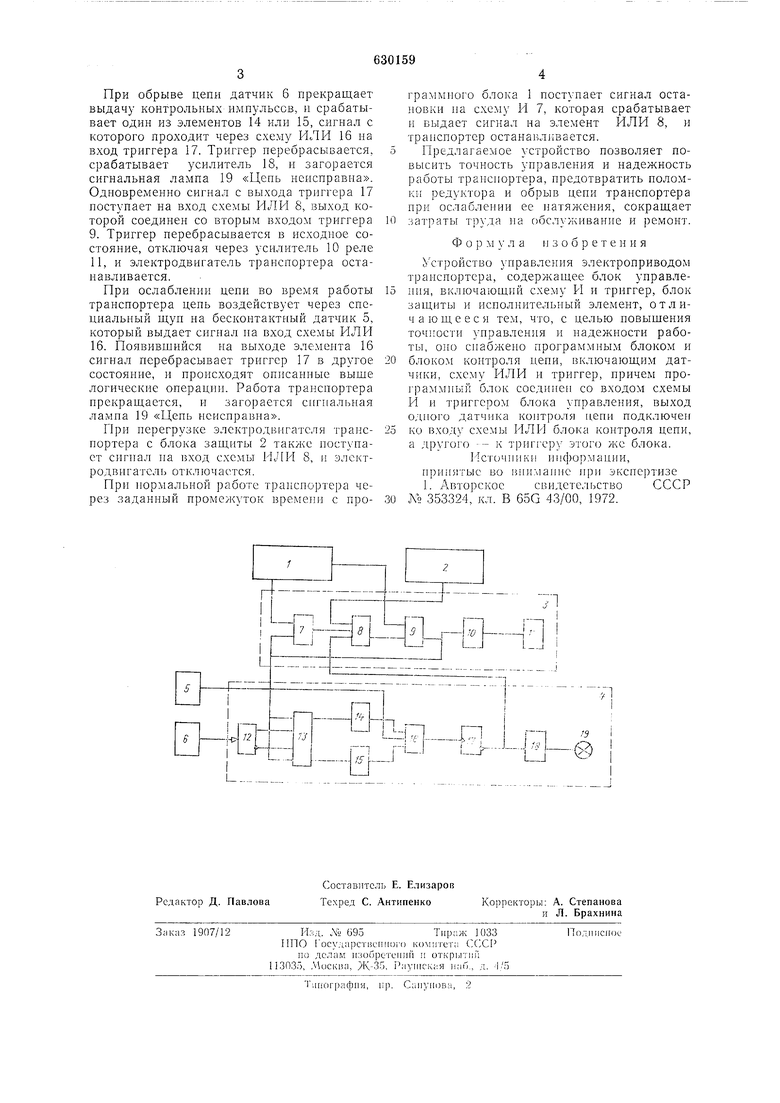
устройстзо управления электроприводом транспортера состоит из программного блока 1, блока защиты от перегрузок 2, блока управления 3, блока контроля цепи 4,
включающего датчики 5 и 6 контроля цепи, схему ИЛИ и триггер.
Блок управления 3 включает схему И 7, схему ИЛИ 8, триггер 9, усилитель 10 и реле 11.
Блок контроля цени 4 включает триггер 12, схему И 13, элементы задержки 14 и 15, схему ИЛИ 16, триггер 17, усилитель 18 и сигнальную ла.мну 19.
стройсгво работает слсдуюииш образом.
11ро1-рамм11Ы1 1 блок 1 В1,1даот в заданное Ь|).л1я сита; запуска па трип-ер 9. Триггер 9 нсребрасы1.Нтся, i; срабатывают усилитель 10 и реле 11, включающее п}скатель электроднпгателя транспортера (на чертеже не показан). Одновременно снгнал с выхода триггера 9 поступает на входы 7 и 13 схем И. Ири работе транспортера его скребкн через специальный щуп воздействуют на бесконтактный датчнк 6, который выдает контрольные импульсы на трнггер 12, с выходов которого поочередно поетупают и,пульсы на входы схемы И 13 и соответственно поочередно подаются импульсы на элементы задержки 14 и 15, которые настроены на время, большее нериода поступлення нмпульсов от датчиков, и при нормальной работе элементы задержки не выдают сигнала на вход схемы ИДИ 16.
При обрыве цепи датчик 6 прекращает выдачу контрольных импульсов, и срабатывает одии из элементов 14 или 15, сигиал с которого проходит через схему ИЛР1 16 иа вход триггера 17. Триггер перебрасывается, срабатывает усилитель 18, п загорается сигнальная лампа 19 «Цепь неисправна. Одновременно сигнал с выхода триггера 17 поступает на вход схемы ИЛИ 8, выход которой соединен ео вторым входом триггера 9. Триггер перебрасывается в исходное состояние, отключая через усилитель 10 реле 11, и электродвигатель транспортера останавливается.
При ослаблении пени во время работы транспортера цепь воздействует через специальный щуп на бесконтактный датчик 5, который выдает сигнал иа вход схемы Р1ЛИ 16. Появивщийся на выходе элемента 16 сигнал перебрасывает триггер 17 в другое состояние, и происходят описаииые выще логические операции. Работа транспортера прекращается, и загорается сигнальная лампа 19 «Цепь пеисправиа.
При перегрузке электродвигателя транспортера с блока защнты 2 также поступает сигнал на вход схемы ИЛИ 8, и электродвигатель отключается.
При нормальной работе транспортера через заданный промежуток времени с программного блока 1 поступает сигнал остановки на схему И 7, которая срабатывает и выдает сигиал на элемент ИЛИ 8, и транспортер останавливается.
Предлагаемое устройство позволяет повысить точность управления и надежность работы транспортера, предотвратить поломки редуктора и обрыв цепи транепортера при ослаблении ее натяжения, сокращает затраты труда па обслхживанне и ремонт.
Ф о р м у
м 3 о о р е т е н и я
л а
Устройство управления электроприводом трапепортера, содержащее блок управления, включающий схему И и триггер, блок защнты и исполнительный элемент, отличающееся тем, что, с целью повыщения точности уиравления и надежности работы, оно снабжено программным блоком и блоком контроля цепи, включающим датчики, схему Р1ЛИ и триггер, причем про1раммный блок соедннен со входом схемы И и триггером блока управления, выход одного датчика ко1ггроля цепи подключен ко входу схемы ИЛИ блока контроля цепи, а другого -- к трип-еру этого же блока.
Источники информации, принятые во 15ниманне при экспертизе 1. Авторское свидетельство СССР АО 353324, кл. В 65G 43/00, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом транспортера | 1989 |
|
SU1671568A2 |
| УСТРОЙСТВО ТЕЛЕУПРАВЛЕНИЯ|:! !ЧГ/' 1 | 1965 |
|
SU174206A1 |
| Установка для управления процессом сварки неповоротных стыков труб | 1987 |
|
SU1488149A1 |
| Устройство для управления электроприводами разветвленных конвейерных линий | 1971 |
|
SU485533A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ С КОРРЕКЦИЕЙ ВЗАИМНОГО ПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ СТАНКА | 1971 |
|
SU420986A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU746432A1 |
| Многоканальное устройство для прог-РАММНОгО упРАВлЕНия | 1979 |
|
SU802929A1 |
| ДИСКРЕТНЫЙ ФАЗОВРАЩАТЕЛЬ | 1970 |
|
SU270064A1 |
| БИБЛИО'.; | 1973 |
|
SU390672A1 |
| Устройство программного управления кругловязальной машиной | 1978 |
|
SU771215A1 |
