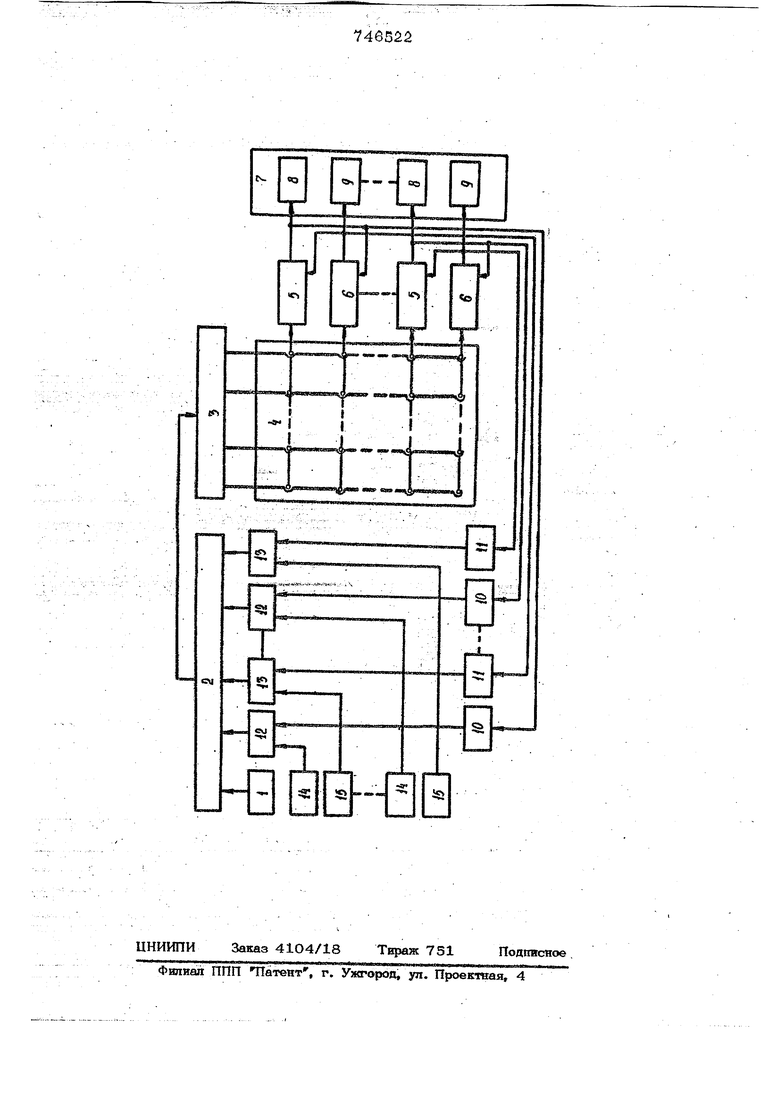
Изобретение огеосвтся к автоматике в вычислительной технике и может быть вс пользовано в сштгемах цюграммного уо(швлевшаг объектами, состояшюлт вз всполнительных механизмов, например ав томанв1 улйпораМЕ. Известеы устройства для программного управления, содержащие распределитель, предназначенный для выдачи вмпульсоо управления, следующих друг за другом в определенной последовательвоств, датчики полонсешш, апвмэнты Память блоки ка чества и объекта управления. Прн 1верво начальном 3aiiyctce устройства иодйется команда Пуск, срабатывает первый апе мент релейна-шагового распределителя. При этом выдается команда на выткншенве технологической операции первого )0ttec са. Удержание срабатывающего Э)шменФа распределителя осушествляется элементом ЛПамять. Блоки качества контролируют параметры выполняемого технологического процесса. Если технологический процесс отклонился от норм, блок качества запре щает уперяшнне дашюго элемента распре... делите ал, «жгнал на угфавлеште объектом не выдается и обработка изделия t4pejspaщается. После окончания процесса срабатывает датчик полшсешя, который ot&mi чает первый элемент распределители и включает второй. При эт&м выдается команда на выполнение технологичесгюй one-, рагии слведукяцего процесса . Эти устройсгша имеют ограниченные фунщсвональЕОЫе возможности, что не шз волнет испош.зовать их в системах npoiv раммного утфавления, где необходим неть. рерывный контроль заданного программой полоеюеЕЯя исполнительных механизмов. Наиболее близким к предлагаемому яв лается устройство для программного управления, содержащее датчики положения и последователыю соединенные генератор . импул: Е1, агаемент И, блок распределения импульсов, блок набора тфограммы, элементы HfSI, первые II вторые триггеры. Тактовые вмпульсы с вьоеода 1: eнepaтopa подаются с аадярным периодом следования через элемент И на переключающий вход блока расггределения илгаульсов, причем элемент И пропускает импульсы лишь в случае отсутствия сигнала ка втором его входе. При поступлении импульса на переключакадий вход блока распределения импульсов 1фоисходйт последо вательное формирование сигналов утхравления на его выходах, начиная с дарвйго, ко торые распределяЗются по пряешым тездам блока набора щюгрвммы. Шсле портуплений сигнала ут1равлёнйя в приемное геездо. Подключенное к входу алвмента ИЛИ, срабатывает один из первых триггеров, что соответствует вкшоче1ШЮ одного из исполнительных мезсаншэмов. В таком состоянии механизм находится до появления сипгала управления в- Гйездё, подключенном через аяемент ИЛИ К нулевому входу данного триггера, Который возвращается в рулевое состояние, и, соответственно, отключается йстШййагельнШ механизм. При посггутошйий cmiana управ лешся в гнездо, подключенное к взооду одного из вторых триггеров |дв шреЬиочается и на еГо выходе формируется сигнал Запрет, который подается Навторой вход элемента И через апемент ИЛИ. Рас пределитель на данном шаге ос/шнаёливается. Конец сигнала Затфет форми}ууется при перебросе Данного триГ5пера в нулевое состояние, что происходит при достижении перемешшощимся исполнительным механизмом заданного тюясженея и срабатывании датчика..: тголожания .рУ Г НедостаткомЭ|то1чэ устройства ясвляет ся недостаточная надежнос5ть и безопасность работы обьеярга управления, заключающиеся в отсутствие автЕрерывного конт роля заданного программой Кйн дого исполни ельного межанйзма, HecMoow ря на то, что в Устройстве шлеются вторые тригге1ры ддя конзрроля ш л жения механизма, работающего в данном шаге, при переходе иа слвд5 0щий шаг контроль за отработавшим механизмом теряется. Отрыв этого механизма от уже не контролирующего датчика tibamceHSfl может пртвести к поломкам к авариям. Цель изобретения - повышение нааЛежности и безопасности работы У11равяя1эМого объекта за счет Ш1фер ышзогр Кбш роля заданного %о)1Т аммой пологкевия каждого исполНителоьНогб механизма неза висиМо от того, работает лн он сейчас или работал рагое..Поставленная )о.ёль Достигается тем, го в устройство, содержащее генератор 74 2 икпульсой, соедине1шый вь1ходом с та1ьтовым входом аиемента И, которо го тюдключен ко входу распределители, выходы которого соединены с соответствующими входами узла ва&фа программы, подключенного вьжодами ко входам Ьрот ветствующих апемвнтов памята, выходы которых являются выходами устройства, датчики положения, входы которых явлаются соответствующими входами ydTpoftсова, и элементы ИЛИ, введены НЕ, причем выход i-rp saieA Hosu памяти ,2 ,.,,Й ) соединен с управляющим входом {i-l)«ro аяемент naMsrro и через V-тый элемент НВ с первым входом i -го элемента ИЛИ, второй вход которого соединен с выходом |-го датчика положения, вьосод (V-l)-ro шмента памяти Пидключец к управляющему входу « -ГО апемента .памяти и через (Г) -1)-ый элемент НВ к первому входу (i-l)-ro юмента ИЛИ, второй вход которого сое дкнев с выходом (V-l)-ro датчика пож женид, выходы элементов ИЛИ соединены с соответствующими управляющими входаг ми аиемента И. На чертеже изображена блок-схема уЬоройства. Устройство содержит генератор 1, эиемант И 2, распределитель 3, узел 4 набора tiporpaMMbi, аяемэшры S и 6 tiaMsти, объект 7 управления, состоящий из приводов 8 и 9 вдtюлнитвльRыx механизмов, ашменда НЕ 10 и 11, зявменты ЙШ 12 и 13, датчшсн 14 iS полшсеНИЯ.- Устройство работает следующим офазом. Датчики положения в зависимости от расшложения исполнительных механизме находятся в одном из состояшгй: если датчик 14 аамшуг, то датчик 15 разомкнут; если датчик 15 замкнут, то датчик ч 14 paaoMJOjyt. Талтовые иглпульсы с выхода генератора 1 Подаются с заданным периодом, следования через элемент И 2 на вход распределителя 3, тфичем ашмент И 2 протчскает импульсы лшпь в случае при- сутхзтвмя сигнале на его входах. Распределитель 3 осуществляет последовательное формирование сигнетюв управления на своих выходах, начиная с первого, которые распределяются по вертикальньхм шинам узла 4, количество выходов которого п. количеством опередил на объекте 7. При определенарй коммуташш вертикальных щан с горвзонг 57 тельными срабатывает соответствукнций зиэмевт 5 (6) памяти и включается срет ветстаующий тфивод 8 (9) истюлиительного механизма объекта управления Отключение ирЕсвода 8 (9) вроисхсяит 1фи пьс тутшенин сигаала управления на соответст вукмцнй элемент 6 (5) памяти, который включается к сбрасывает соответствующий агаемент 5 (6) памяти, в нулевое йосто ние. Привод 8 (9) исполнительного мехавизма отключается, а привод 9 (8) включае-еся. В с;дгчае отсутствия коммутадвси в узле 4 распределитель 3 неттрерывно выдает сигшлы управления поочередно ва вертикальные шины уза 4, так как на все входах элемента И 2 присутствуют разрешающие сигналы через элементы НЕ 10 (11) и ИЛИ 12 (13). Если при определенной коммутации узла 4 включается задашдай элемент 5 (6), сигнал с его выхода включает соответствующий тфивод 8 (9) и Поступает на вход соответствующего элемента НЕ 10 (11). Сигналы на выходах элемента НЕ 10 (11) и соответзтвукяцего элемента ИЛИ 12 (13) снитется и в результате элемент И 2 закрывается, а распределитель 3 останавливаете ся на данном шаге. При достиженшс включенным приводом 8 (9) заданного шло жения и срабатывании соответсШующшчэ ему датчика 14 (15) на выходе связанш го с ним апемента ИЛИ 12 (13) пшвя ется сигнал, который разрешает ший ход распределителя 3. При работе объекта 7 управл гая в случае смешения какого-либо пршаода 8 (9) с заданного программой положения и отключения соответствукацего датчика 14 (IS) с выхода соответствующего айёмента ИЛИ 12 (1.3) исчезает разрешающий сигнал, и распределите 3 осташв ливается, блокируй дальне1Ьцую работу устройстве. Таким образом, устройс-лво позвшяет в процессе работы ocymecrensiTb непрерыв- ный контропгь заданного программой полосжепня каждого привода исполнительного механизма объекта управления. Повышение надежности и безопасности работы объекта обеспечивается остановкой цикла при взмепенни заданного положения как работаю22щего в шаге, так я ранее сработавших мёх;зййзмЬв. При применении дав ног устройства уменьшается вероятность пояомэк и аварий, так как в большинстве сл гчаев они вызываются уходом какого, либо мезсанизма с заданного оолозкения. Кроме того, устройство позволяет сократить затраты на ремоит, тювысить срок службы объекта управления в значительно 5низить опасность травматизма. Формула изобретения Устройство для управления последовательностью операций, содержашее генера тор импульсов, соединенньцй выходом с тактовым входом элемента И, выход которого подключей ко входу распределителя, выходы которого соединены с соответствующими входами узла набора программы, подключенного выходами ко входам соот ветствующих элементов памяти, которых являются выходами устройства, да:тчикк положения, входы которых являк)тся соответствующими входами устройст. ва и элементы ИЛИ, отличающееся тем, что, с целью пивьшёния надежности устройства, в него введены элементы НЕ,, причем выход V-ro элемента памяти ( ,2 ...,Н) соединено управляющим входом (i-l)-ro апемешга памяти и через -4dfi элемент НЕ с первым входсимг -го аяеменга ИЛИ, второй вххэд котч)рогь соединен с выходом -го датчике Ш ложения, (i-l)-ro элемента иамятвг подключен к управлякмцёму ходу | -го элемента шмяти и через ((-1)-ый элемент НЕ к первому входу (V-l)-ro элемента ИЛИ, второй вход коорого соединен с выходом (1-1)-го датнка положения, выходы элементов ИЛИ оединены с соответствующими управляюими входами элемента И. Источники .ии, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 6 244469, кл. 6 05 В 19/02, 1967. 2.Авторское свидетельство СССР & 537328, кл. © 05 В 19/08, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пусковое устройство для автоматического включения резерва | 1976 |
|
SU616689A1 |
| Многоканальный счетчик импульсов | 1976 |
|
SU570206A1 |
| Устройство для адаптивного управления технологическим процессом | 1988 |
|
SU1656495A1 |
| Программное устройство управления | 1990 |
|
SU1714576A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Многоканальный регулятор | 1979 |
|
SU873207A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Цифровой регулятор для гидромелиоративных систем | 1981 |
|
SU1004968A1 |
| Устройство для программного управления технологическим оборудованием | 1988 |
|
SU1638707A1 |
| Программное устройство управления | 1986 |
|
SU1314310A1 |