очность определения типа транспорт- ого средства.
Целью изобретения является повыение точности определения типа транспортного средства.
Это достигается тем, что измеряют аксимальную амплитуду сигнала первого детектора и корректируют значение ремени присутствия транспортного средства в контролируемой зоне втоого детектора в зависимости от максимальной амплитуды сигнала первого етектора.
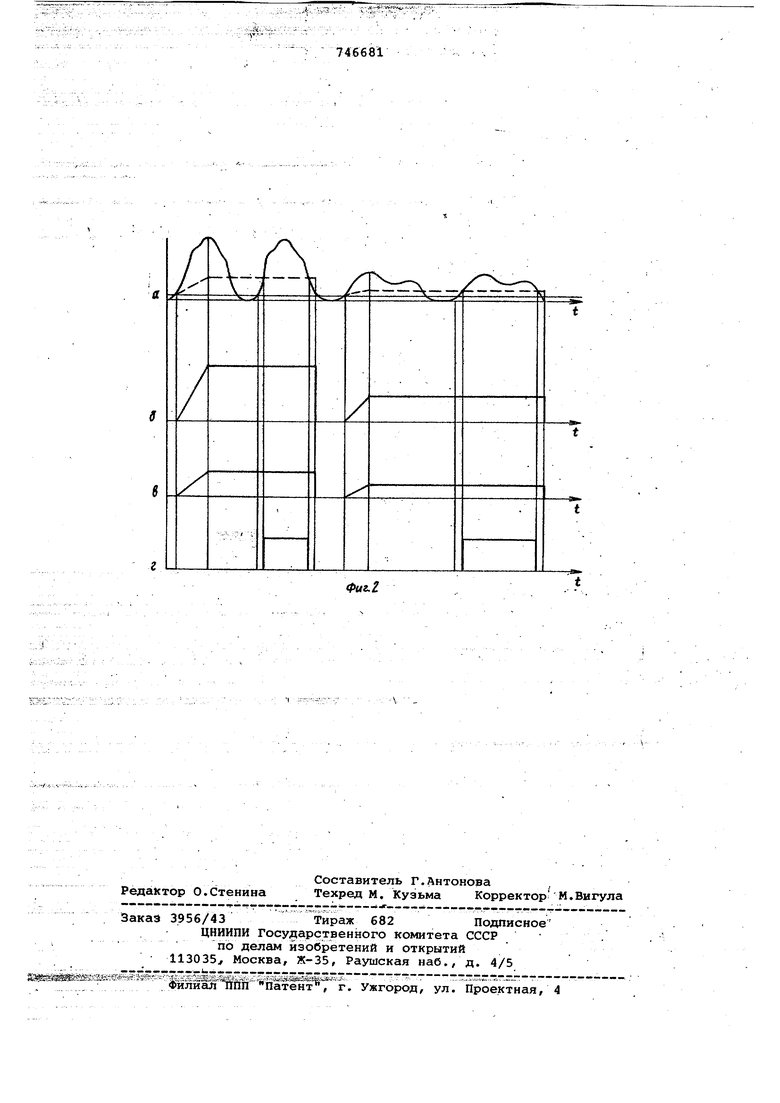
На фиг. 1 приведена структурная схема устройства для реализации предлагаемого способа, на фиг. 2 - временные диа:граммы, поясняющие способ.
Устройство, реализующее предлагаемый способ определения типа транспортного средства, содержит первый и второй детекторы 1 и 2 транспорта, имеющие аналоговый выходной сигнал, выходы которых подключены соответствённо к пороговым элементам 3 и 4, имеющим одинаковое пороговое напряжение, выходы пороговых элементов 3 и 4 соединены с установочными входами триггера 5, выход которого подключен к вычислительному блоку б, выход последнего соединен с одним из входов блока 7 сравнения, другие входы которого подключены к выходам программного блока 8, а выходы блока 7 сравнения являются выходами устройСТВа. /./... . . .- . . . . . :;. : Выход детектора 1 транспорта через блок 9 определения экстремума и блок 10 коррекции подключен к одному из входов, порогового элементами, в орой вход которого соединен с выходом детектора 2 транспорта, а вкисод подключен к другому входу вычислительного блока 6.
Сигнал а {см.фкт.2) представляет собой аналоговый выходной сигнал детекторов 1 и 2 транспорта, сигнал, б соответствует выходному сигналу блока 9 определения экстремума, сигнал в является выходным сигналом блока коррекции 10 и соответствует пороговому напряжению порогового элемента. 11, сигнал г откорректированный сигнал.
Предлагаемый способ реализуется следующим образом.
Определяют время прохождения транспортным средством базового расстояния Ед-, равного расстоянию между Соответствуювзими, например передними, краями контролируемых зон чувствительных элементов детектора 1 и 2 транспорта, путем измерения длительности ti t -выходного сигнала триггера 5, который взводится и сбрасывается выходными сигналами пороговых элементов 3 и 4. Затем определяют время присутствия t, транспортного средства в контролируемой зоне детектора 2 транспорта, которое со1ответствует длительности выходного сигнала порогового элемента 11. Величина t зависит от скорости движения, длины и клиренса транспортного средства. При этом влияние клиренса таково, что при постоянном пороге срабатывания порогового элемента 11 значения времени присутствия t,, легковых и грузовых транспортных средств, имеющих разную длину и движущихся с одинаковой скоростью, почти равны друг другу. Эю приводит к значительным погрешностям измерения длины транспортного средства, а следовательно, и определения его типа. .
Для того, чтобы учесть влияние величины клиренса, измеряют амплитуду выходного аналогового сигнала детектора 1 транспорта с помощью блока 9 определения экстремума, выполненного например, на основе аналогового запоминающего устройства и имеющего на выходе постоянное напряжение, равное экстремальному значению выходного напряжения детектора 1 транспорта.
корректируют полученный сигнал с помощью блока 10 коррекции, предстадляющего собой в общем случае четырехполюсник с нелинейной передаточной характеристикой, которая выбирается таким образом, чтобы прохождению различных транспортных средств с различным клиренсом соответствовали значения времени прису.ствия в контролируемой зоне t., равные времени присутствия масс транспортных средств в площади индуктивного чувствительного элемента детектора транспорта, т.е.
где цд - длина индуктивного чувствительного элемента,
C3- электрическая длина транс портного средства.
Таким образом достигается стабилизация размеров контролируемой зоны на уровне Скг 4э f Я& Ву,, -длина контролируемой зоны.
Затем вычисляют длину трансиортното средства с помощью вычислительного блока б, полученное значение сравнивают в блоке 7 сравнения с эталонным значением и по результату сравнения судят о типе транспортного средства.
Предлагаемый способ позволяет повысить точность измерения длины транспортных средств путем стабилизации размеров контролируемой зоны, что, в свою очередь, повышает точность определения типа транспортного средства.
Формула изобретения Способ определения Типа транспортного средства, основанный на измерёНИИ времени присутствия транспортного средства в зоне детекторов и времени прохождения базового расстояния между двумя детекторами, определении отношения времени присутствия транспортного средства в зоне одного из детекторов и времени прохождения баз вого расстояния между детекторами, умножении длины базового расстояния между двумя детекторгили на полученно отношение, вычитании из полученного произведения длины контролируемой зоны, сравнении полученной разности ,с эталонным значением, отличающийся тем, что, с целью повыше ния точности определения типа транспортного средства, измеряют максимальную амплитуду сигнала первого детектора, и корректируют значение времени присутствия транспортного средства в контролируемой зоне второго детектора в зависимости от максимальной амплитуды сигнала первого детектора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 500536, кл. G 08 G 1/015, 02.01.73. 2.Наземный транспорт 80-х годов. Сб.ст. под ред. Р.Торнтона (пер. с англ.). М., Мир, 1974 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения пространственно-временных характеристик транспортных средств | 1980 |
|
SU918960A1 |
| Устройство для определения экстремумов | 1982 |
|
SU1024959A1 |
| Магнитометрический детектор транспорта | 1988 |
|
SU1608731A1 |
| Регистратор транспорта | 1986 |
|
SU1345232A1 |
| Устройство для определения параметров транспортных потоков | 1980 |
|
SU920817A1 |
| Детектор транспорта | 1978 |
|
SU763946A1 |
| Магнитометрический детектор транспорта | 1982 |
|
SU1037319A1 |
| Устройство для определения занятости дорог | 1980 |
|
SU886035A1 |
| Устройство для определения типа и счета транспортных средств | 1982 |
|
SU1048499A1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
II 1
Ли
.i
