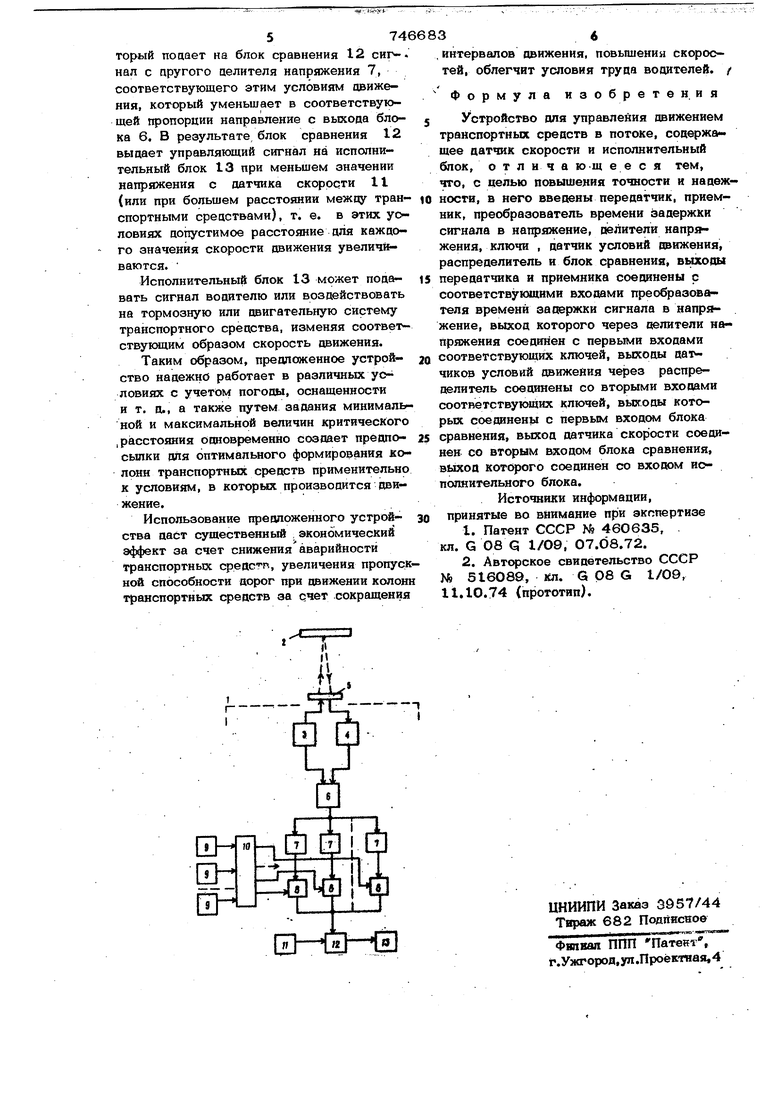
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕЙСТВ В ПОТОКЕ . , I : . Изобретение относится к транспорту, и может применяться одя сигнализации на транспортных сфедствах. Известно устройство для измерения расстояния Межпу спеоующимн цруг за прутом по колее объектами, содержащее установленную впопь копей (шижения о1ь коронную провошсу с опреоеленным значением затухания на единицу опины, а также генератор, установленный на ро ном транспортном средстве, и приемник,. установленнь1й на транспортном средстве индуктивно с п ровоакой Vlj Недостятком указанного устройства яв ляется ограниченная возможность приме нення, связанная с необходимостью усТ нсжки проводки вдоль трассы пвнжений. Наиболее близкнм техническим решением является устройство для преаопвра щения столкновения между транспортными средствами, содержащее датчик скорости, приемник, блок сравнения, выход которого соединен со входом исполнительного 6лр1с Кроме трго, известное устройство содер Ясйт теЛевизирнйЬ1й тракт, фиксирующая система крторого управляется от датчика скорости таким образом, что телевнзис ittoe изображение получается резким только в пределах заданного расстояния, соответствующего каждому значению скорости овижения транспортного средства. Сигнал телевизионного тракта AHOfmanrруеТся с помощью дифференцируквцей цепи и блоков лся ической обработки, кот( рые выделяют сигналы с крутыми фронтами и тем самым фиксируют факт появлений какихглибо объектов в Пределах допустимого для данной скорости расстояния, а при наличии таковых вырабатывают соответствующий сигнал на исНбпнител ный блок, который предупреждает вопите ля или воздействует на тормр1зную систему транспортного средства 2. Недостатками известного устройства являются .сложность, низкие надежярсть и точность определения предельно допустимых расстояний при различных условиях. Цель изобретения - повышение гочностк и надежности устройства при однов е менном его упрощении. Это достигается тем, что в ус- ройство введены передатчик, приемник, преобразователь времени задержки сигнала в напряжение, делители напряжения, ключи, рас пределитель, датчики условий движения, и блок сравнения, выходы передатчика и приемника соединены с соответствующими входами преобразователя времени задержки сигнала в напряжение, выход которого через делители напряжения соединен с первыми входами соответствующих ключей, выходы датчиков условий движения через распределитель соединены со вторыми входами соответствующих ключей, выходы которых .соединены с первым входом блока сравнения, выход датчика скорости соединен со вторым входом блока сравнения, выход которого соединен со входом исполнительного блока. Структурная схема устройства предста лена на чертеже, где изображены транспортное средство 1, на котором установлено данное устройство, объект 2 (например, 1фугое транспортное средство), относительно которого определяется расстояние, передатчик 3, приемник 4, антенный блок 5, преобразователь времени задержки сигнала в напряжение 6, делители напряжения 7, ключи 8, датчики условий движения 9, распределитель 10, датчик скорости 11, блок сравнения 12, исполнительный блок 13. В качестве датчиков условий движения могут использоваться, например, датчик включедия подфарников, датчик включения стеклоочистителей, датчик угла наклона корпуса транспортного средства. При этом включение подфарников свидетельствует о том, что движение происходит в условиях плохой видимости (темно, туман, и т. д.), включение стеклоочистителей свидетельствует о том, что движение про исходит при неблагоприятных погодных условиях (дождь, снег и т. д.). Срабатььвание датчика угла наклона корпуса тран портного средства, свидетельствует о том, что движение происходат, например, под уклон. Наличие каких-либо других особых условий, например гололед, сколь зкая дорога и т. Д., может характеризоваться включением отдельного датчика например тумблера. Во всех случаях предельно допустимы расстодайямежтг транспортными средствами должны иметь различную зависимость от скорости двткения. 7 3 Устройство работает следующим образом. Передатчик 3 излучает через антенный блок 5 импульсные зондирующие сигналы (например, ультразвуковые колебания) , которые зондируют пространство перед транспортным средством I (сбоку или сзади его ), отражаются от ближайщего объекта 2 Ттранспортного средства) и принимаются приемником 4. Импульсные сигналы передатчика 3 и приемника 4 поступают на входы преоб разователя времени задержки сигналов в напряжение б, который вырабатьшает напряжение, пропорциональное величине времени задержки Между излученными и принятыми зондирующими сигналами, т. е. пропорциональное расстоягаие межау транспортными средствами I и 2. Это напряжение поступает на входы делителей напряжения 7, Которые целят его в соотношениях, соответствующих каждому из условий движения. Выходы делителей напряжения 7 соединены через 8 с первым входом блока сравнения 12. На второй вход блока сравнения 12 поступает сигнал с датчика скорости 11, который вырабатывает напряжение, харак- скорость движения транспортного средства I. Если движение транспортного средства происходит в нормальэных условиях, т. е. датчики 9 включены, то с распределителя Ю поступает управляющий сигнал на один из ключей 8, который пропускает на вход блока сравнения 12 сигнал с того делителя напряжения 7, который соответствует нормальным условиям движения. Напряжение с выхода соответствующего делителя 7 сравнивается в блоке срав нения 12 с напряжением, поступающим от датчика скорости 11. Когда напряже- ние от датчика скорости II сравняется или превысит напряжение с делителя 7, блок сравнения 12 вырабатывает управляющий сигзнал на исполнительный блок 13, который сигнализирует о том, что расстояние между транспортными средствами достигло предельно допустимого значения для данной скорости движения. ЕСЛИ движение транспортного средства происходит при каких-либо особых условиях, т. е. включены один или несколько датчиков условий движения 9, то в зависимости от сигналов на входе распреде- лителя 10 последний подает управлятсший сигнал и открывает 1фугой ключ 8, ко574торый подает на блок сравнения 12 сигнап с пругого целителя напряжения 7, соответствующего этим условиям озижения, который уменьшает в соответствующей пропорции направление с выхода блока 6. В результате блок сравнения 12 выдает управляющий сигнал на исполнительный блок 13 при меньшем значении напряжения с датчика скорости 11 (или при большем расстоянии между транспортными средствами), т. е. в этих уоловиях допустимое расстояние для каждого значения скорости движения увелич ваются. Исполнительный блок 13 может подавать сигнал водителю или воздействовать на тормозную или двигательную систему транспортного средства, изменяя соответствукяцим образом скорость движения. Таким образом, предложенное устройство надежно работает в различных условиях с учетом погоды, оснащенности и т. д., а также путем задания минималь ной и максимальной величин критического расстояния одновременно создает предпосылки для оптимального формирования колонн транспортных средств применительно к условиям, в которых производится движение. Использование предложенного устройства даст существенный экономический эффект за счет снижения аварийности транспортных средств, увеличения пропускной способности дорог при движении колонн транспортных средств за рчет сокращения 3 интервалов движения, повышения скоростей, облегчит условия труда водителей. / Формула изобретения Устройство для управления движением транспортных средств в потоке, содержа-, шее датчик скорости и исполнительный блок, отличаю щееся тем, что, с целью повышения точности и надеж- носги, в него введены передатчик, приемник, преобразователь времени задержки сигнала в напряжение, целители напряжения, ключи , датчик условий движения, распределитель и блок сравнения, выходы передатчика и приемника соединены с соответствукяцими входами преобразователя времени за{|ержки сигнала в напрянжение, выход которого через делители напряжения соединен с первыми входами соответствующих ключей, выходы дат чиков условий движения через распределитель соединены со вторыми входами соответствующих ключей, вы:7.оды которых соединены с первым входом блока сравнения, выход датчика скорости соедииен со вторым входом блока сравнения. выход которого соединен со входом иополнительного блока. Источники информации, принятые во внимание при экспертизе 1.Патент СССР № 46О635, кл. G 08 Q 1/О9, 07.d8.72. 2.Авторское свидетельство СССР № 516О89, кл. G 08 G 1/09, 11,10.74 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движениемТРАНСпОРТНыХ СРЕдСТВ B пОТОКЕ | 1978 |
|
SU809308A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2388629C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444452C1 |
| Устройство для подсчета пассажиров | 1984 |
|
SU1216785A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180293C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2254245C1 |
| Устройство для подсчета пассажиров транспортного средства | 1982 |
|
SU1083212A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА. | 2014 |
|
RU2571148C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
