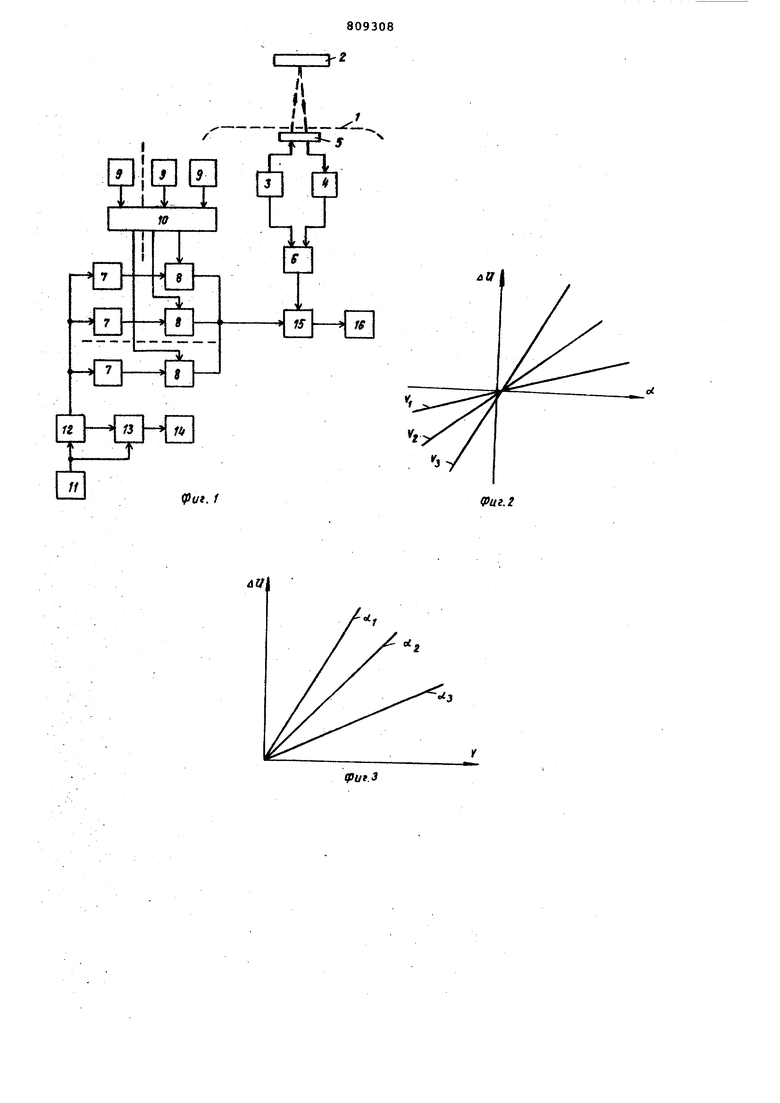
симости от различных условий движения, например, метеорологических и т.д. (нормальные условия, темно, дождь и т.д.), сигнализирует водителю об опасности возможного столкновения или воздействует на двигательную или тормозную систему транспортного средства при возникновении критических ситуаций, что повышает безопасность движения Однако в устройстве предельно допустимое расстояние определяется с помощью делителей напряжения, что задс1ет линейный характер зависимости предельно допустимых расстояний от скорости. В действительности же длина тормозного пути зависит от скорости нелинейно, притом эта зависимость ока вается различной в зависимости от состояния дороги (мокро, гололед и т.д.) и в зависимости от угла нак лона дороги. Устройство не учитывае этого фактора, что снижает точность определения предельно допустимых расстояний в различных условиях. Цель изобретения - повышение точ ности устройства. Поставленная цель достигается те что в устройство введены функциональные преобразователи, сумматор, бл умножения и датчик угла наклона тра спортного средства, выход датчика скорости соединен с первыми входами сумматора и блока умножения, выход датчика угла наклона соединен со вт рым входом блока умножения, выход которого подключён ко второму входу сумматора, выход которого через фун циональные преобразователи соединен со входом ключей, выход преобразова ля задержки сигнала в напряжение по ключен ко второму входу блока сравнени на фиг.1 - устройство, на фиг.25- графики зависимостей. , . Устройство содержит транспортное средство 1, на котором установлено данное устройство, объект 2 (например, другое транспортное средство) относительно которого определяется расстояние и передатчик 3, приемник 4, антенный блок 5, преобразователь 6времени задержки сигнала в напряжении, функциональные преобразователи 7, ключи 8, датчики 9 условий движения, распределитель 10, датчик 11 скорости, сумматор 12, блок умножения, датчик 14 угла наклона транспортного средства , блок 15 сравнения, исполнительный блок 16. В качестве датчиков 9 условий. движения могут использоваться напри датчик включения подфарников, датчи включения очистителей и т.д. При эт ,включение подфарников свидетельствует о том, что движение про исходит в условиях плохой видимости (темно, туман и т.д.), включение стеклоочистителей свидетельствует том, что движение происходит при неблагоприятных погодных условиях (дождь, снег и т.д.). Наличие каких-либо других особых условий (например, гололед, скользкая дорога и т.д.), может характеризоваться включением отдельного датчика. Датчик 14 угла наклона транспортйого средства может быть выполнен, например, в виде маятниковой системы с механическим,электромагнитным или электрическим демпфированием ее колебаний,возникающих при измене.нии скорости движения от вибраций во время движения и т.д. Устройство работает следующим образом. Передатчик 3 излучает через антенный блок 5 импульсные зондирующие сигналы (.например, ультразвуковые колебания), которые зондируют пространство перед транспортным средством 1 (сбоку или сзади него), отражаются от ближайшего транспортного средства 2 и принимаются приемником 4 . Импульсные сигналы передатчика 3 и приемника 4 поступают на входы преобразователя 6 времени задержки сигналов в напряжение, который вырабатывает напряжение, пропорциональное величине задержки между излученными и принятыми зондирующими сигналами, т.е. пропорциональное расстояние между транспортными средствами 1 и 2 . Информация с датчика 11 скорости в виде напряжения Uy, пропорционального значению V, поступают на первый вход сумматора 12, на второй вход которого поступает напряжение, соответствующее величине поправки дУ, вносимой в значение реальной скорости AUv f (Uv, и) , где о. - значение продольного угла наклона транспортного средства (дороги). Введение поправки U.U v позволяет вносить коррекцию при определении предельно допустимого расстояния , учитывающую движение по дороге с уклоном. Величина поправки дУу прямо пропорциональна значению продольного угла наклона дороги od и скорости движения транспортного средства, а ее знак зависит от знака угла наклона дороги. Если движение происходит под уклон, то CkUy положительна, то есть суммируется с реальным значением Ку, что приводит к искусственному увеличению продольно допустимого расстояния. Если транспортное средство въезжает на возвышенность, то AUy отрицательна, то есть вычитается из реального значения Uy, при этом предельно допустимое, расстояние уменьшается. При движении по горизонтальной дороге величина поправки .Uv равна нулю.
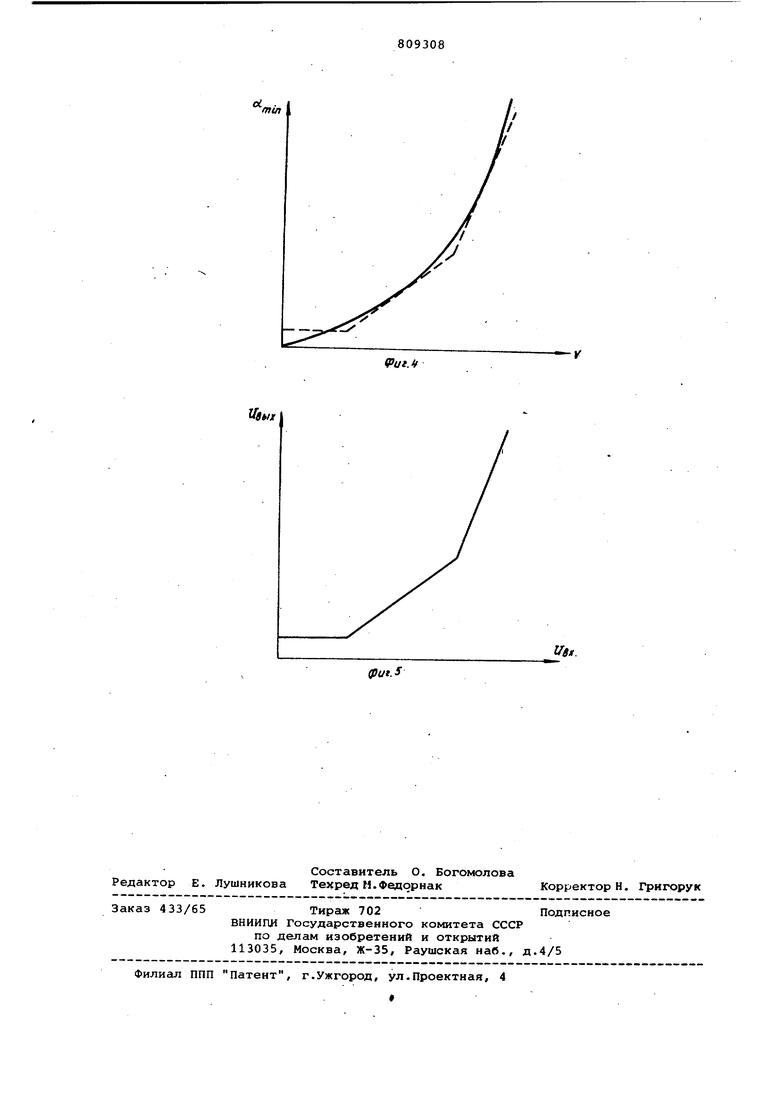
Зависимостьли f (оС) или V Const имеет вид, представленный на фиг.2, зависимость ли f(V) прис 1 Соп51 имеет вид, представленный на фиг.З.
Напряжение Uу от датчика 11 скорости и напряжение от датчика 14 угла наклона перемножаются на блоке 13 умножения и полученное на его выходе значение поправки л.и у поступает на сумматор 12, где суммируется с величиной DV- Напряжение на выходе сумматора 12 соответствует значению скорости движения с учетом коррекции на величину продольного угла наклона дороги.
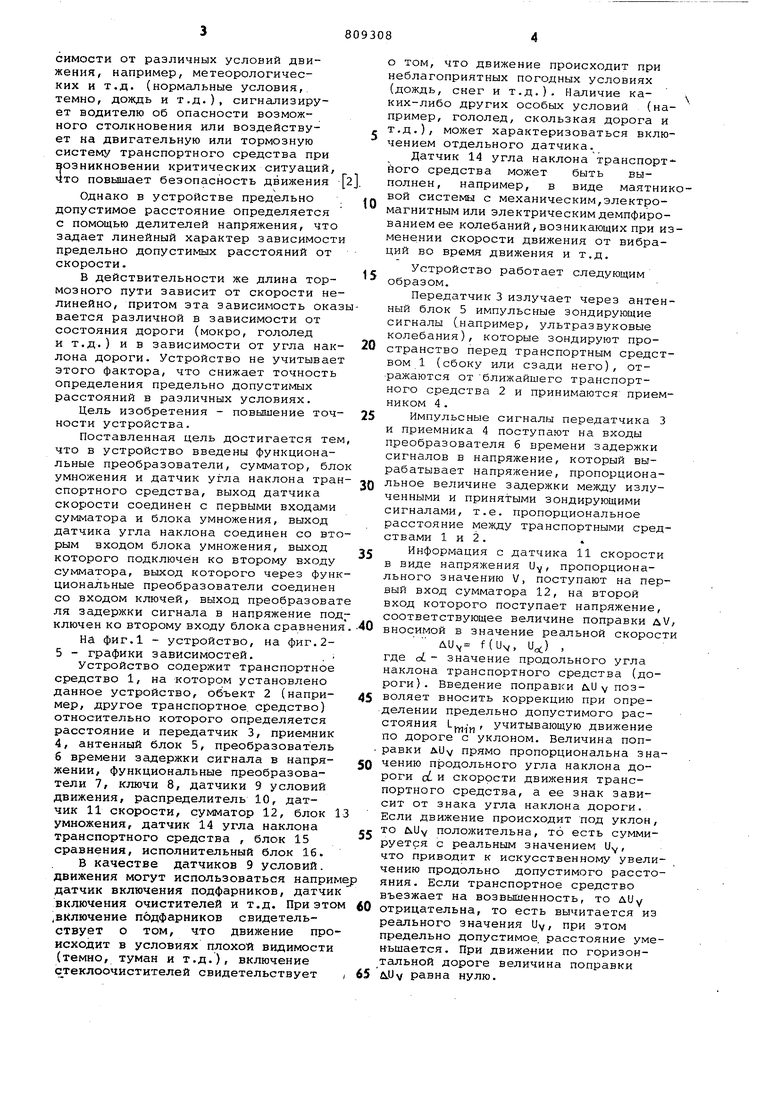
С выхода сумматора 12 напряжение поступает на входы функциональных преобразователей 7, которые имеют характеристику, отражающую зависимость от скорости, представленная кривой на фиг.4. Эта кривая может быть экстраполирована с достаточной для практики точностью в виде трех отрезков прямых (пунктир),поэтому каждый функциональный преобразовател 7 имеет характеристику, состоящую из трех отрезков прямых, как это изображено на фиг.З.
Точка перегиба и углы наклона отрезков определяются условиями движения, поэтому каждый функциональный преобразователь 7 имеет характеристику, характерную для данных условий движения.
Сигналы с выходов функциональных преобразователей 7 поступают через ключи 8 на вход блока 15 сравнения. Работой ключей 8 управляет распределитель 10. Если движение транспортного средства происходит в нормальных условиях, то с распределителя 10 поступает управляющий сигнал на один из ключей 8, который пропускает на блок 15 сравнения сигнал с того функционального преобразователя 7, характеристика которого соответствует нормальным условиям движения.
Если движение транспортного средства происходит при каких-либо особых условиях, т.е. включены один или несколько датчиков 9 условий движения, то в зависимости от сигналов на входе распределителя 10 последний подает управляющий сигнал и открывает другой ключ 8, который пропускает сигнал с другого функционального преобразователя 7, характери,стика которого соответствует этим условиям движения.
Напряжение с выхода соответствующего функционального преобразовате ля 7 сравнивается в блоке 15 сравнения с напряжением, поступагацим от преобразователя времени задержки сигнала в напряжение 6, т, е. сравниваются напряжения, соответствующие реальной дистанции L и предельно допустимому расстоянию , определенному для данных условий и данной скорости движения. Если
L L
блок 15 сравнения подает
Wiin
на исполнительный блок 16 команду, которая приводит в действие содерoжащиеся в последнем сигнализаторы (световая и звуковая сигнализация) или исполнительный механизм, воздействующий на тормозную или двигательную систему транспортного
5 средства, если .
Таким образом, данное устройство позволяет повысить безопасность движения как при различных метеорологических, так и дорожных
0 условиях.
Оорг-тула изобретения
Устройство для управления движением транспортных средств в потоке, содержащее соединенные с антенным блоком передатчик, и приемник вы5ходы которых соединены со входами преобразователя времени задержки сигнала в напряжение, выходы датчиков условий движения подключены ко входам распределителя, вы0ходы которого подключены к управляющим входам ключей, выходы ключей соединены с первым входом блока сравнения, выход которого соединен с исполнительным блоком, и датчик
5 скорости, отличающееся тем, что, с целью повышения точности устройства, в него введены функциональные преобразователи, сумматор блок умножения и датчик угла накло0на транспортного средства, выход датчика скорости соединен с первыми входами сумматора и блока умножения, выход датчика угла наклона транспортного средства соединен со вторым входом блока умножения, выход
5 которого подключен ко второму входу сумматора, выход которого функциональные преобразователи соединен со .входами ключей, выход преобразователя времени задержки сигнаOла в напряжение подключен ко второму входу блока сравнения.
Источники инфсэрмации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
5 № 516089, кл. G 08 G 1/09, 1974.
2.Авторское свидетельство СССР по заявке № 2575069/18-24,
кл. G 08 G 1/09, 31.01.79.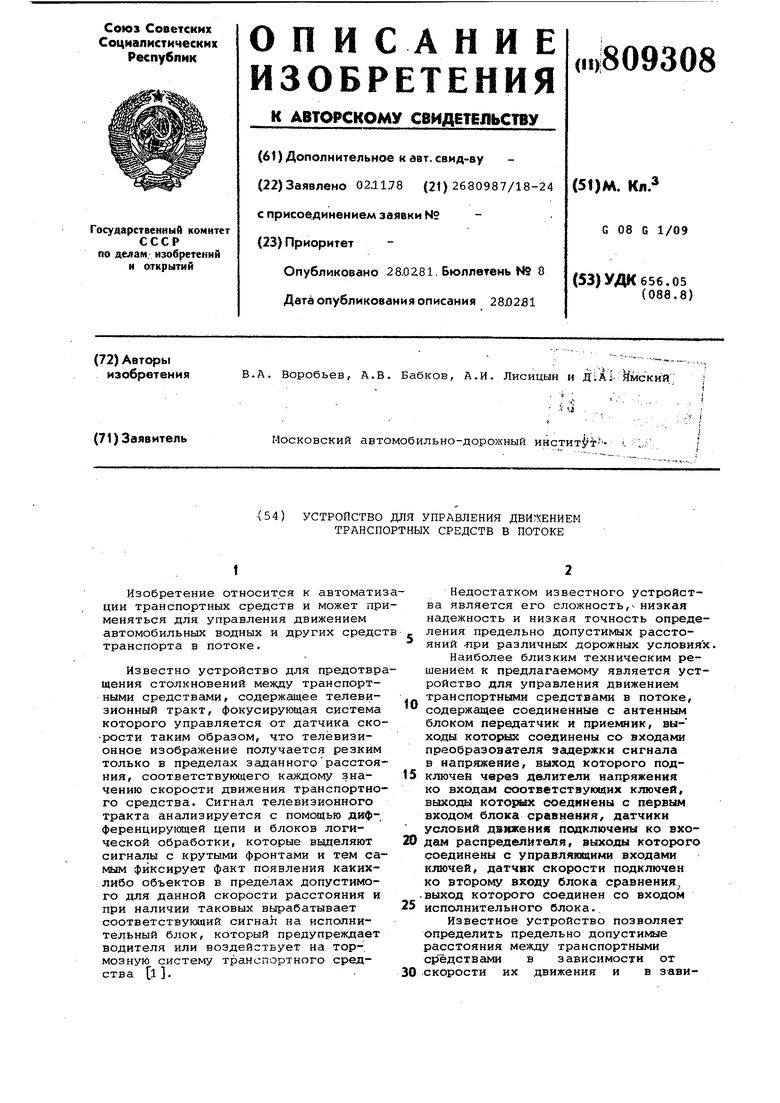
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортных средств в потоке | 1978 |
|
SU746683A1 |
| Устройство для предотвращенияСТОлКНОВЕНий МЕжду ТРАНСпОРТНыМиСРЕдСТВАМи | 1979 |
|
SU809309A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Устройство для регулирования скорости движения транспортного средства | 1983 |
|
SU1117679A1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Устройство для измерения скорости и угла рыскания транспортного средства | 1988 |
|
SU1635143A1 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |