Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам для подъема тяжеловесных конструкций, преимущественно кранов мостового типа.
Известен телескопический подъемник, содержащий установленный на опорном узле телескопический гидроцилиндр с неподвижной и выдвижными секциями и штоком, на котором установлена грузовая площадка.
Недостатками данного подъемника является малая высота подъема груза и повышенная энергоемкость.
Наиболее близким к предлагаемому является известный телескопический подъемник, содержащий установленную на опорном узле телескопическую башню с неподвижной и выдвижной секциями, закрепленный на последней оголовок с тросовыми подвесками, подвижную вдоль башни грузовую площадку с установленными на ней управляемыми и подпружиненными фиксаторами, взаимодействующими с упорами, размещенными с шагом вдоль неподвижной секции, с оголовком и с захватами, размещенными на тросовых подвесках, и силовой механизм, выполненный в виде длиннеходового гидроцилиндра, смонтированного внутри башни.
Однако известный подъемник также имеет повышенную энергоемкость вследствие большой массы поднимаемых частей подъемника.
Цель изобретения - снижение энергоемкости подъемника,
Указанная цель достигается тем, что известный телескопический подъемник, содержащий установленную на опорной платформе телескопическую башню с неподвижной внешней и подвижной внутренней секцией, закрепленный на последней оголовок с подвесками, выполненными с возможностью взаимодействия с установленной на неподвижной секции с возможностью перемещения вдоль нее грузовой площадкой с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упорами, размещенными равномерно вдоль неподвижной секции и силовой механизм снабжен установленным на неподвижной секции башни с возможностью перемещения вдоль нее кольцом с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упомянутыми упорами неподвижной секции башни, упорами, равномерно размещенными на подвижной секции башни с шагом, равным шагу упоров неподвижной секции, дополни- тельными управляемыми фиксаторами,
смонтированными в верхней части неподвижной секции и выполненными с возможностью взаимодействия с упорами подвижной секции, и грузозахватными траверсами, имеющими узлы соединения с подвесками и грузовой площадкой, а неподвижная секция выполнена с окнами, размещенными в зоне упоров подвижной секции под дополнительными управляемы0 ми фиксаторами и выполненными высотой каждое, превышающей шаг этих упоров, при этом подвески выполнены жесткими, управляемые фиксаторы грузовой площадки размещены на ней с возможностью вза5 имодействия через окна с упорами подвижной секции, а силовой механизм смонтирован между грузовой площадкой и концом.
Кроме того, неподвижная секция башни
0 телескопического подъемника выполнена составной, по меньшей мере, из двух частей, связанных разъемным соединением, при этом нижняя выполнена высотой, не меньшей высоты, занимаемой грузовой пло5 щадкой в совокупности с кольцом.
Каждый узел соединения траверс с подвесками в телескопическом подъемнике включает в себя проушину, смонтированную на конце подвески, палец, установлен0 ный в направляющих втулках, выполненных на траверсе, и подпружиненный рычаг, одно плечо которого шарнирно связано с упомянутым пальцем, при этом на траверсе смонтирован фиксатором для взаимодействия со
5 вторым плечом рычага.
Кроме того каждый узел соединения траверс с грузовой площадкой телескопического подъемника включает в себя палец, установленный в вертикальной направляю0 щей втулке, выполненной в траверсе, и соответствующее гнездо, выполненное в грузовой площадке для упомянутого пальца, при в вертикальной направляющей ету;7 ч выполнен Г-образный паз, в котором
5 раз uir.ciH рычаг, связанный с пальцем.
Отличие предлагаемого телескопического подъемника от известного состоит в том, что он снабжен установленным на неподвижной секции башни с возможностью
0 перемещения вдоль нее кольцом с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упомянутыми упорами неподвижной секции башни, упорами, равномерно размещенными на не5 подвижной секции башни с шагом, равным шагу упоров неподвижной секции, дополнительными управляемыми фиксаторами, смонтированными в верхней части неподвижной секции и выполненными с возможностью взаимодействия с упорами
подвижной секции, и грузозахватными траверсами, имеющими узлы соединения с подвесками и грузовой площадкой, а непод- вижная секция выполнена с окнами, разме- щенными в зоне упоров подвижной секции под дополнительными управляемыми фиксаторами и выполненными высотой каждое, превышающей шаг этих упоров, при этом подвески выполнены жесткими, управляемые фиксаторы грузовой площадки разме- щены на ней с возможностью взаимодействия через окна с упорами подвижной секции, а силовой механизм смонтирован между грузовой площадкой и кольцом. Благодаря этому появляется воз- можность. поднимать на начальном этапе грузовую площадку без выдвижной секции, а на следующем этапе - наоборот, что снижает массу поднимаемых частей, и соответственно, затрату энергии в грузоподъемном механизме, т.е. его энергоемкость.
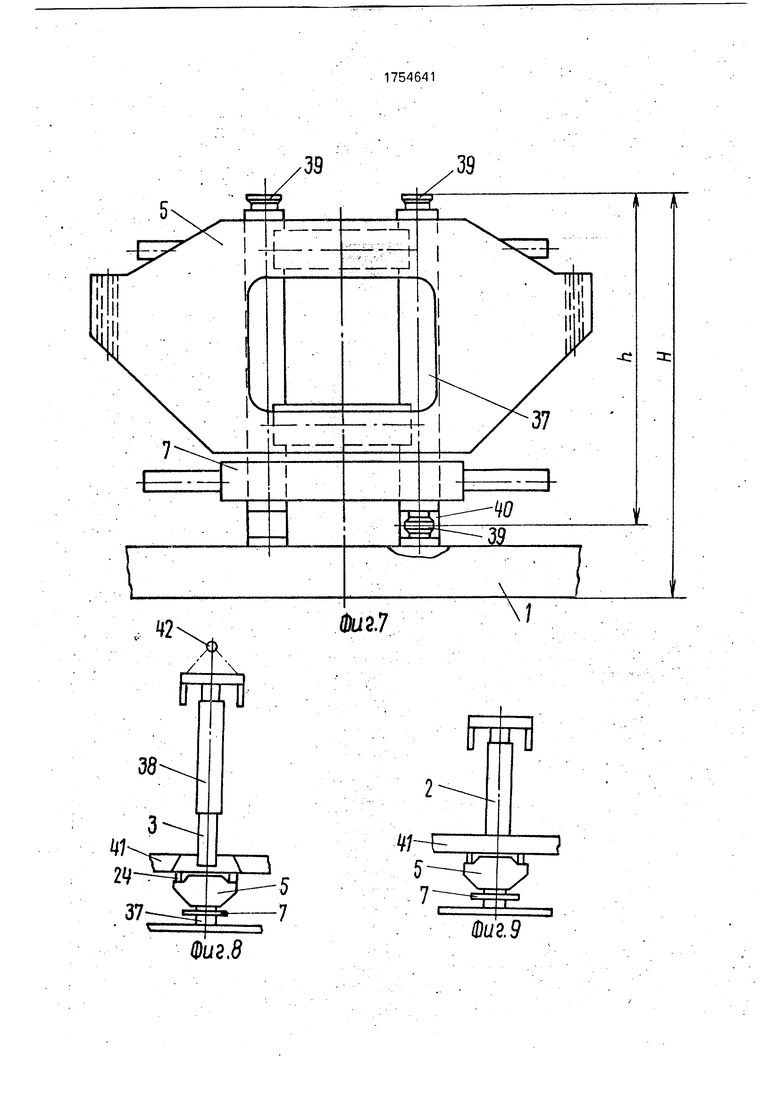
На фиг. 1 представлен телескопический подъемник, общий вид; на фиг, 2 - узел t на фиг. 1; на фиг. 3 - узел 11 на фиг. 1; на фиг. 4 - грузозахватная траверса подъемника; на фиг. 5 - вид А на фиг. 4; на фиг. 6 - разрез Б-Б на фиг. 4; на фиг 7 - нижняя часть неподвижной секции башни с грузовой площадкой и кольцом; на фиг. 8-11 - схемы работы подъемника
Телескопический подъемник содержит опорную платформу 1, установленную на ней телескопическую башню 2, включающую неподвижную внешнюю 2 и подвижную внутреннюю 3 секции, закрепленный на последней оголовок 4 и смонтированный на неподвижной секции 2 телескопической башни шаговый механизм, включающий в себя каретку 5 с грузовой площадкой 6, кольцо 7 и гидроцилиндры 8, смонтирован- ные между кареткой 5 и кольцом 7 (фиг. 1). Каретка 5 и кольцо 7 содержит управляемые фиксаторы соответственно 9 и 10, включающие в себя пальцы 11 и 12 и механизмы 13 перемещения пальцев 11 и 12. В верхней части неподвижной внешней секции 2 смонтированы дополнительные управляемые фиксаторы 14, которые включают пальцы 15 и механизм 16 перемещения пальцев 15. При этом в неподвижной 2 и подвижной 3 секциях телескопической башни выполнены размещенные с шагом t отверстия 17 и 18 для пальцев 11,12 и 15 и в верхней части неподвижной секции 2 под дополнительными управляющими фиксаторами 14 выгтол- йены окна а, высота которых (Н) больше шага (t) отверстий При этом пальцы 12 фиксаторов 10 при их полном выдвижении взаимодействуют только с отверстиями 17 неподвижной секции 2, а пальцы 11 фиксаторов 9 имеют большой ход и при их полном выдвижении могут взаимодействовать с отверстиями 18 выдвижной секции 3.
Оголовок 4 включает в себя опорно-поворотное устройство 19, на котором установлены двухконсольные балки 20, с концами которых шарнирно связаны жесткие подвески 21, на концах которых шарнирно смонтированы серьги 22 с проушинами 23.
Подъемник содержит также грузозахватные траверсы 24, в которых выполнена продольная прорезь 25 для проушин 23, связанных посредством пальцев 26, подвижно установленных в направляющих втулках 27, 28, выполненных на траверсах 24 симметрично прорези 25, Каждый из пальцев 26 шарнирно связан с одним плечом двухпле- чевого рычага 29, шарнирно смонтированного на траверсе 24 и связанного с ней пружиной 30. При этом второе плечо двуплечего рычага 29 имеет возможность взаимодействовать с фиксатором 31. смонтированным на траверсе 24,
Кроме того, каждая из грузозахватных траверс 24 включает в себя пальцы 32, каждый из которых подвижно установлен в вертикальной направляющей втулке 33, выполненный в траверсе 24. Во втулке 33 выполнен Г-образный паз 34, в котором размещен рычаг, связанный с пальцем 32. При этом в грузовых площадках 6 каретки 5 выполнены вертикальные гнезда 36 для пальцев 32 грузозахватных траверс 24.
Неподвижная секция 2 телескопической башни может быть выполнена составной, по меньшей мере, из двух частей 37, 38, нижняя 37 из которых выполнена наименьшей высоты h достаточной для размещения на ней каретки 5 с кольцом 7. Нижняя 37 и верхняя 38 части неподвижной секции 2 соединены между собой, и нижняя часть 37 соединена с опорной рамой 1 посредством быстроразъемных соединений, включающих в себя пальцы 39 с буртиками на концах и разрезную втулку 40 с выточкой под буртики пальцев 39,
Предлагаемый шаговый подъемник работает следующим образом.
Собирают монтируемую конструкцию, например мостовой кран 41, на временных опорах (не показаны), высота которых превышает высоту Н (фиг. 7) опорной рамы 1 с нижней частью 37 неподвижной секции 2. Затем опорную раму 1 с нижней частью 37 секции 2, на которой смонтирован шаговый механизм (каретка 5. кольцо 7 и гидроцилиндры 8), устанавливают под мостом крана 41. Грузозахватные траверсы 24 заводят между мостом крана 41 и грузовыми площадками,
при этом пальцы 32 подняты и зафиксированы рычагами 35 в Г-образных паззх 34, После этого расфиксируют пальцы 32 и опускают их в гнезда 36 грузовых площадок 6. Посредством вспомогательного грузоподъемного механизма 42 верхняя часть 38 неподвижной секции 2 и выдвижная секция 3, зафиксированные одна с другой посредством фиксаторов 14, через проем между полумостами крана 41 монтируются на нижней части 37 неподвижной секции 2, После монтажа подъемника посредством шагового механизма осуществляют подъем крана 41, перемещая шаговый механизм с грузозахватными траверсами 24 и установленным на них кра.ном 41 по неподвижной секции 2. При этом кольцо 7 и каретка 5 посредством фиксаторов 10, 9 поочередного фиксируются на неподвижной секции 2, а гидроцилиндры 8 поочередно работают на выдвижение и втягивание их штоков. При достижении шаговым механизмом верхнего положения (фиг. 1,10), при котором проушины 23 входят в прорези 25 траверс 24, расфиксируют двуплечие рычаги 29, и под действием пружин 30 пальцы 26 вводятся в отверстия проушин 23 и втулок 28, соединяя таким образом грузозахватные траверсы 24 с подвесками 21. Затем, опустив каретку 5, вводят пальцы 11 фиксаторов 9 каретки 5 через окна а в отверстия 18 выдвижной секции 3, при этом пальцы 12 фиксаторов 10 кольца 7 введены в отверстия 17 неподвижной секции 2 и штоки гидроцилиндров 8 задвинуты (фиг 2) После этого посредством шагового механизма производят выдвижение секции 3 с монтируемым краном 41. Для этого пальцы 15 фиксаторов 14 выводят из отверстий 18 (фиг. 2) и Осуществляют выдвижение секции 3 на Один шаг т., выдвигая штоки гидроцилиндров 8. При этом прорези обеспечивают возможность перемещения фйксатчбр 6ё 9 относительно секции 2, При выдвижении секции 3 на шаг t пальцы 15 вводят в отверстия 18, а пальцы 11 выводят. Затем опускают каретку 5 на оди н шаг t и выводят пальцы 11 в соответствующие отверстия 18. После выведения пальцев 15 из отверстий 18 осуществляют выдвижение секции 3 на второй mart. Аналогично производят выдвижение секции 3 до достижения краном 41 требуемой высоты, разворачивают и устанавливают кран 41 в проектное положение на подкрановые пути (не показано). Затем Производят опускание секции 3 и шагового механизма в обр зтн Ом порядке и демонтируют . Формула изобретения 1. Телескопический подъемник, содер- установленную на опорной платфор ме телескопическую башню с неподвижной внешней секцией и подвижной внутренней секцией, закрепленной на последней оголовок с подвесками, выполненными в возможностью взаимодействия с установленной на неподвижной секции с возможностью перемещения вдоль нее грузовой площадкой с управляемыми фиксаторами выполненными с возможностью взаимодействия с упорами, размещенными равномерно вдоль неподвижной секции, и силовой механизм, отличающийся тем, что, с целью снижения энергоемкости, он снабжен установленным на неподвижной секции башни
с возможностью перемещения вдоль нее кольцом с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упомянутыми упорами неподвижной секции башни, упорами, равномерно размещенными на подвижной секции башни с шагом, равным шагу упором неподвижной секции, дополнительными управляемыми фиксаторами, смонтированными в верхней части неподвижной секции и выполненными с возможностью взаимодействия с упорами подвижной секции, и грузозахватными траверсами, имеющими узлы соединения с подвесками и грузовой площадкой, а неподвижная секция выполнена с окнами, размещенными в зоне упоров подвижной секции под дополнительными управляемыми фиксаторами и выполненными каждое высотой, превышающей шаг этих упоров, при этом подвески выполнены жесткими, управляемые фиксаторы грузовой площадки размещены на ней с возможностью взаимодействия через окна с упорами подвижной секции, а силовой механизм смонтированы между грузовой площадкой и
кольцом.
2, Подъемник по п. 1, о т л и ч а ю щ и й- с я тем, что неподвижные секция башни выполнена составной, по меньшей мере, из двух частей, связанных разъемным соединением, при этом нижняя выполнена не меньшей высоты, занимаемой грузовой плоЩадгой в совокупности с кольцом.
3. Подъемник поп. 1, о т л и ч а ю щ и й- с я тем, что каждый узел соединения траверс с подвесками включает в себя проушину, смонтированную на конце подвески, палец, установленный и направляющих
втулках, выполненных на траверсе, и под- п ружиненный рычаг, одно плечо которого шарнирно связано с упомянутым пальцем, при этом на траверсе смонтирован фиксатор для взаимодействия с другим плечом рычага.
4. Подъемник по п. 1,отличающий с я тем, что каждый узел соединения траверс с грузовой площадкой включает в себя палец, установленный в вертикальной направляющей втулке, выполненном РТГ.ОПЛП/
се. и соответствующее гнездо, выполненное в грузовой площадке для упомянутого пальца, при этом в вертикальной направляющей втулке выполнен Г-образный паз, в котором пячмешен рычаг, связанный с пальцем.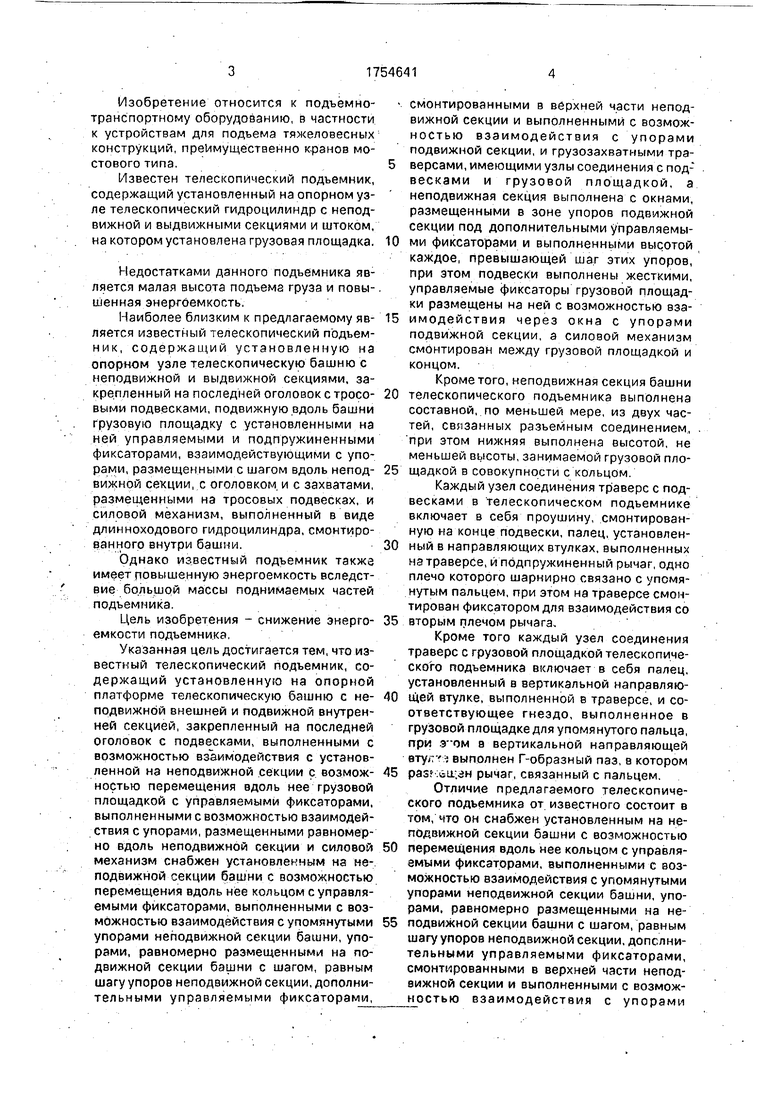
| название | год | авторы | номер документа |
|---|---|---|---|
| Крановая установка | 1986 |
|
SU1361103A1 |
| Устройство для раздвижения телескопической башни самомонтируемого крана | 1976 |
|
SU553194A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2260557C2 |
| Шаговый подъемник | 1990 |
|
SU1740313A1 |
| Башенный кран | 1983 |
|
SU1106783A1 |
| Телескопический подъемник | 1984 |
|
SU1204557A1 |
| Строительный подъемник | 1978 |
|
SU740677A1 |
| Башенный кран | 1987 |
|
SU1498697A1 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА И ДЕМОНТАЖА | 2001 |
|
RU2225344C2 |


Использование: устройство относится к подъемно-транспортному оборудованию, в частности к устройствам для подъема тяжеловесных конструкций, преимущественно кранов мостового типа. Сущность изобретения: подъемник содержит опорную раму 1, установленную на ней телескопическую башню, включающую неподвижную 2 и подвижную 3 секции, смонтированный на следней оголовок 4 и смонтированный на неподвижной секции 2 шаговый механизм, включающий каретку 5 с грузовой площадкой 6, кольцо 7 и гидроцилиндры 8, смонтированные между кареткой 5 и кольцом 7, Каретка 5 и кольцо 7 содержат управляемые фиксаторы. В верхней части неподвижной секции 2 смонтированы дополнительные фиксаторы 14 и выполнены окна для управляемых фиксаторов каретки 5. В секциях 2, 3 выполнены размещенные с шагом отверстия для всех фиксаторов. На оголовке 4 смонтированы жесткие подвески 21. Подъемник содержит грузозахватные траверсы, устанавливаемые на грузовую площадку 6 и соединяемые с подвесками 21.При работе подъемника после подъема шагового механизма с траверсами 24 по неподвижной секции 2 шаговый механизм осуществляет выдвижение секции 3 с траверсами 24, соединенными с подвесками 21. 3 з п.ф-лы, 11 ил. л ел с VJ к Os fcb риг.1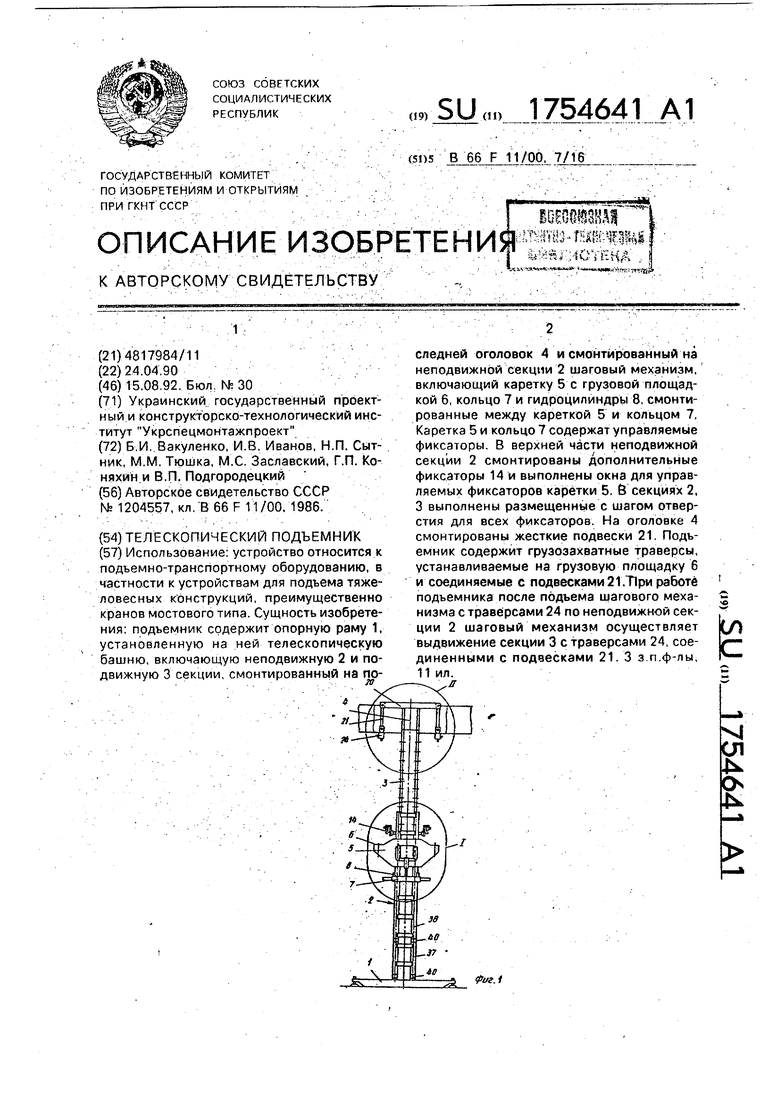
16
16
/J
фиг. 2
И
Buff A
фиг. 5
6-6
6 МФ
iWfrSAl
8 Мф
S
гсЛиг.Ю
w
2
Фиг//
| Телескопический подъемник | 1984 |
|
SU1204557A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
