Изобретение относится к подъемно- транспортным машинам, в частности к устройствам для вертикального и горизонтального перемещия грузов.
Цель изобретения - расширение функциональных возможностей и упрощение конструкции.
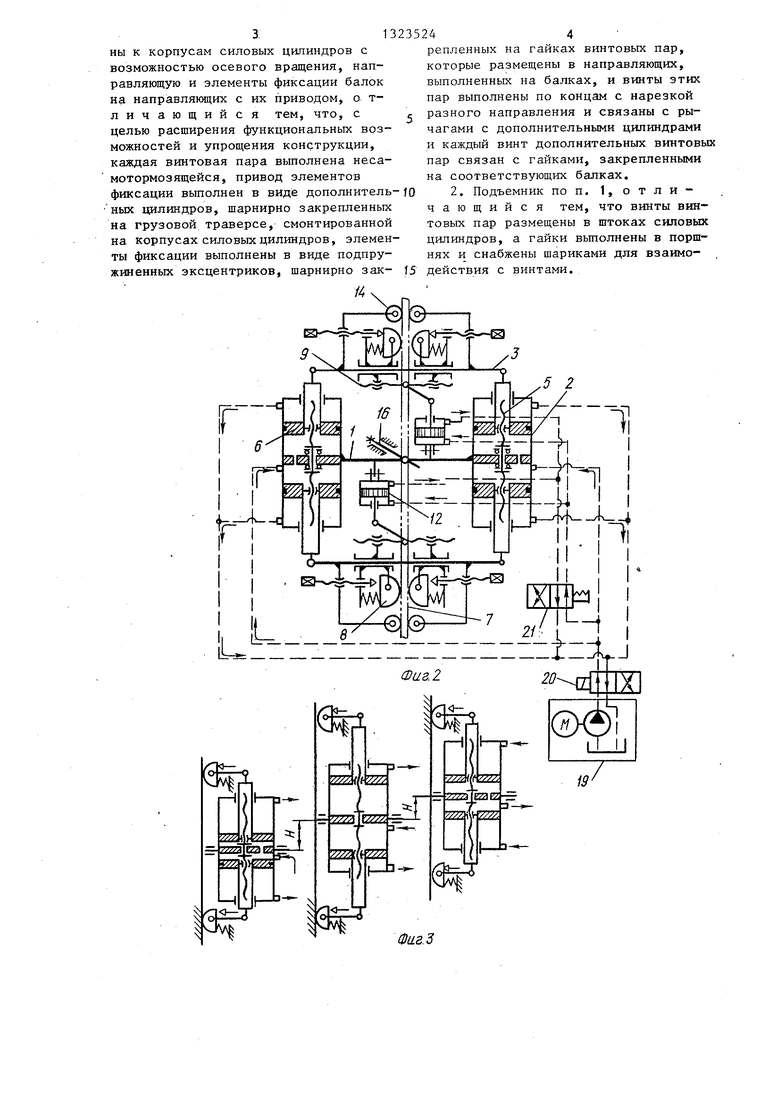
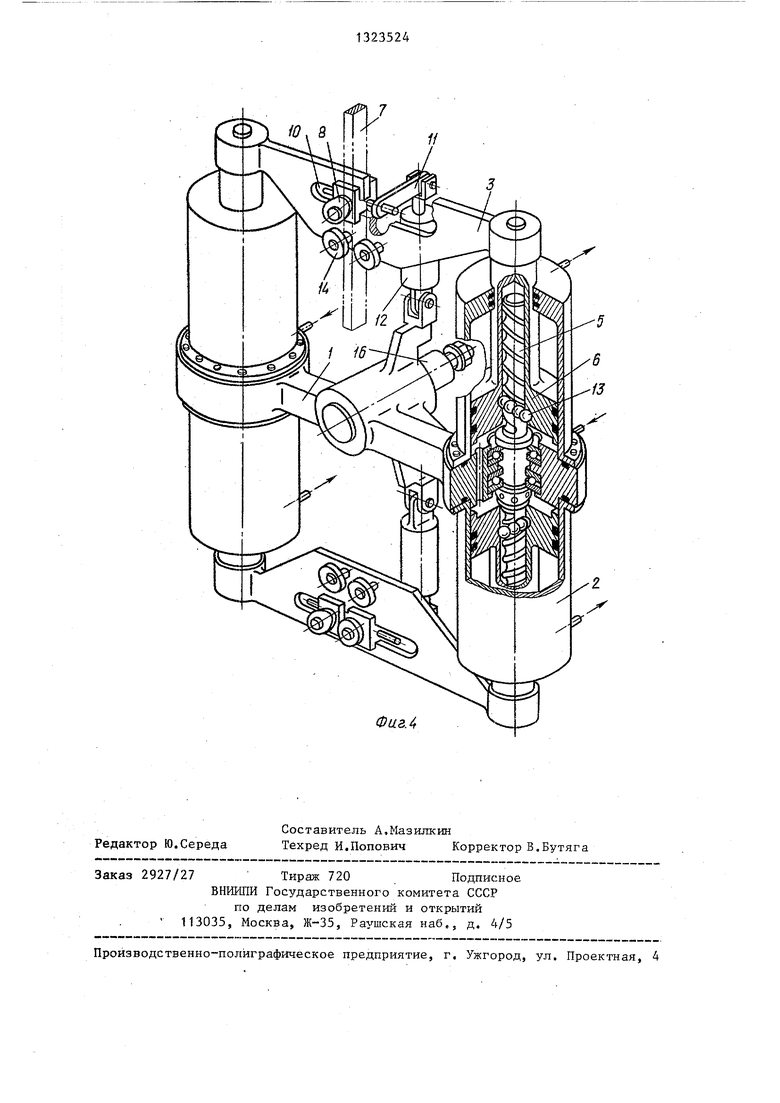
На фиг. 1 схематргчески изображен подъемник; на фиг, 2 - кинематическая схема подъемника; на фиг. 3 - положе- fO ние отдельных узлов при подъеме; на фиг. 4 - привод подъемника.
Подъемник содержит грузовую траверсу 1, двухпоршневые силовые циковой полости нилше Ьо водит к повороту винт в свою очередь перем заклинивает нижнюю п 8 на направхсяющей 7, бесштоковой полости ра 12 при повороте в к расклиниванию верх риков 8,
Нарастающее давле полостях силовых цил дит к перемещению их перемещение происход скоростью. Винты пар
20
30
35
линдры 2, штоки которых связаны верх- 15 вуют с шариками 13. ней 3 и нижней 4 бапками, винтовые пары 5, гайки 6 которых связаны с указанными балками. Винты 5 выполнены по концам с нарезкой разного направления. Подъемник перемещается по направляющей 7, для фиксации на которой предназначены элементы фиксации балок с их приводом., выполненные в виде подпружиненных эксцентриков 8, шарнирно закрепленных на гайках вин- товых пар 9, которые размещены в направляющих 10, выполненных на балках 3 и 4, Винты пар 9 выполнены по концам с нарезкой разного направления « и связаны рычагами 11 с дополнительными цилиндрами 12 приводов элементов фиксации. Указанные цилиндры 12 шарнирно закреплены на грузовой траверсе 1, которая закреплена на силовых цилиндрах 2.
Винты винтовых пар 5 размещены в штоках силовых цилиндров 2, гайки 6 выполнены в поршнях и снабжены шариками 13 для взаимодействия с винтами,
На балках 3 и 4 смонтированы ролики Невзаимодействующие с направляющей 7, Грузовая платформа 15 соединяется с приводом пальцем 16 и перемещается по раме 17 на роликах 18, Для создания давления в гидросистеме на платформе 15 установлены насосная станция 19, золотниковый распределитель 20 и кран 21 управления.
Устройство работает следующим образом.
После установки привода на грузовую платформу 15, соединив его с платформой пальцем 16, так чтобы направляющая 7 рамы 17 проходила между эксцентриками В и роликами 14, создается давление в силовых 2 и дополнительных цютиндрах 12 насосйой станцией 19, причем давление в штоПроисходит переме лового цилиндра ввер и, соответственно, п торая перемещается в ликах 18.
После переключени росистеме золотников лем 20 давление нара полости верхнего цил этом поворачивает ви центрики перемещаютс ходит замыкание их 7, а нижний цилиндр винт пар 9, приводит эксцентриков с напра растающее давление в тях цилиндров 2 прив нию их корпусов на ш подъема повторяется
При опускании пла ходимо переключить к темы управления ципи изменится порядок вк вающих механизмов. П да для перемещения г движущихся по горизо с направляющей, при сторону схема работы же, как и при переме 45 платформы вверх, в о лении необходимо при 180 на пальце 16, н порных магистралей к
50 Формула изо
1, Подъемник, со зовую траверсу, двух цилиндры, штоки кото 55 ней и нижней балками гайки которых связан балками и выполнены ного направления, а
ковой полости нилше Ьо цилиндра 12 приводит к повороту винта пар 9, который в свою очередь перемещает гайки, заклинивает нижнюю пару эксцентриков 8 на направхсяющей 7, а давление в бесштоковой полости цилиндра 12 при повороте винта 9 приводит к расклиниванию верхней пары эксцентриков 8,
Нарастающее давление в бесштоковых полостях силовых цилиндров 2 приводит к перемещению их поршней, причем перемещение происходит с одинаковой скоростью. Винты пар 5 взаимодейст
вуют с шариками 13.
Происходит перемещение корпуса силового цилиндра вверх на величину И и, соответственно, платформы 15, которая перемещается в раме 17 на роликах 18.
После переключения напора в гидросистеме золотниковым распределителем 20 давление нарастает в штоковой полости верхнего цилиндра 12, при этом поворачивает винт пар 9, эксцентрики перемещаются внутрь, происходит замыкание их с направляющей 7, а нижний цилиндр 12, поворачивая винт пар 9, приводит к расклиниванию эксцентриков с направляющей 7, Нарастающее давление в штоковых полостях цилиндров 2 приводит к перемещению их корпусов на шаг. Затем цикл подъема повторяется.
При опускании платформы 15 необходимо переключить кран 21 гидросистемы управления ципиндров 12, т,е, изменится порядок включения заклинивающих механизмов. При работе приво- да для перемещения грузовых платформ, движущихся по горизонтальному пути с направляющей, при движении в одну сторону схема работы привода такая же, как и при перемещении грузовой платформы вверх, в обратном направлении необходимо привод повернуть на 180 на пальце 16, не переключая напорных магистралей краном 21,
Формула изобретения
1, Подъемник, содержащий грузовую траверсу, двухпоршневые сиповые цилиндры, штоки которых связаны верх- 55 ней и нижней балками, винтовые пары, гайки которых связаны с указанными балками и выполнены с нарезкой разного направления, а винты прикреплены к корпусам силовых цилиндров с возможностью осевого вращения, направляющую и элементы фиксации балок на направляющих с их приводом, о т- личающийся тем, что, с целью расширения ф(ункциональных возможностей и упрощения конструкции, каждая винтовая пара выполнена несамотормозящейся, привод элементов фиксации выполнен в виде дополнитель ных ЦИЛ1ШДРОВ, шарнирно закрепленных на грузовой траверсе, смонтированной на корпусах силовых цилиндров, элементы фиксации выполнены в виде подпружиненных эксцентриков, шарнирно зак-
/4
репленных на ганках винтовых пар, которые размещены в направляющих, выполненных на балках, и винты этих пар выполнены по концам с нарезкой разного направления и связаны с рычагами с дополнительными цилиндрами и каждый винт дополнительных винтовы пар связан с гайками, закрепленными на соответствующих балках.
2, Подъемник по п. 1, отличающийся тем, что винты винтовых пар размещены в штоках силовых цилиндров, а гайки вьтолнены в поршнях и снабжены шариками для взаимодействия с винтами.
Фаг.З
//
Фи.г.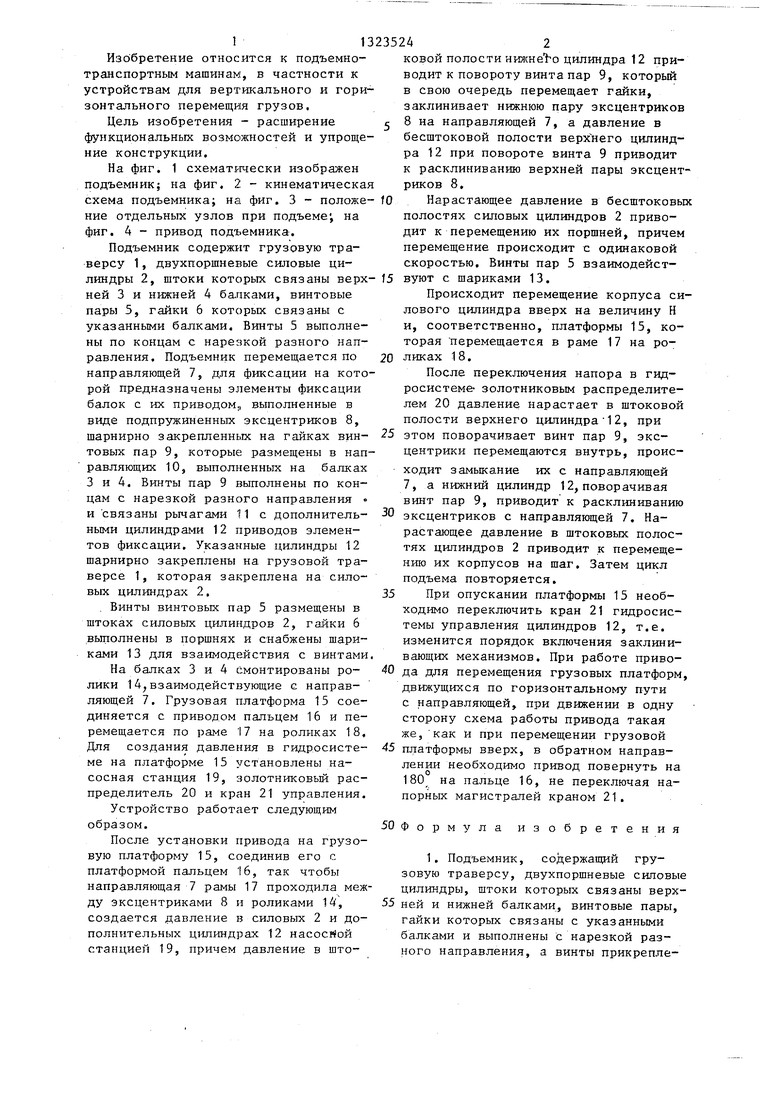
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ГИДРОЦИЛИНДР ДВУСТОРОННЕГО ДЕЙСТВИЯ | 2002 |
|
RU2278304C2 |
| Привод подъемника для вертикального перемещения тяжеловесных конструкций | 1978 |
|
SU747808A1 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ ПОГЛОЩАЮЩЕГО АППАРАТА | 2008 |
|
RU2392138C2 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА | 1993 |
|
RU2085701C1 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА-2 | 1993 |
|
RU2097527C1 |
| Устройство для снятия поглощающего аппарата с железнодорожного транспортного средства | 1988 |
|
SU1532381A1 |
| ГИДРАВЛИЧЕСКИЙ ПОДЪЕМНИК | 2005 |
|
RU2297382C2 |
| Устройство автоматического расцепления автосцепки движущихся вагонов | 1985 |
|
SU1382719A1 |
Изобретение относится к области подъемно-транспортных машин, в частности к устройствам для вертикально- .го и горизонтального перемещений грузов. Цель изобретения - расширение функциональных возможностей и упрощение конструкции. Устройство содержит винтовые пары, вьшолненные несамотормозящимися, элементы фиксации на направляющей 7 с их приводом, выполненные в виде дополнительных цилиндров 12, шарнирно закрепленных на грузовой траверсе 1, которая смон- тирована на корпусах силовых цилиндров 2. Элементы фиксации выполнены .в виде подпружиненных эксцентриков 8, шарнирно закрепленных на гайках винтовых пар, которые размещены в направляющих,, вьтолненных по верхней 3 и нижней 4 балках. Винты пар гаек выполнены по концам с нарезкой разного направления и связаны рычагами с цилиндрами 12. Винты несамотормозящихся пар размещены в штоках силовых ци-- линдров 2 и снабжены шариками для взаимодействия с гайками, выполненными в поршнях силовых цилиндров. 1 3. п. ф-лы, 4 ил. (Л
Редактор Ю.Середа
Составитель А.Мазшткин
Техред И.Попович Корректор В,Бутяга
Заказ 2927/27 Тираж 720Подписное
ВНГОШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Привод подъемника для вертикального перемещения тяжеловесных конструкций | 1978 |
|
SU747808A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
