.- . Изобретение относится к геофизическому приборостроейию, а именно к устройству грайиметров для измерений с борта движущегося судна. Известны морские набортные грави.метры Щ и 2 . Эти гравиметры делится на два Типа: гравиметры дрямбfo преобразования и гравиметры компенсационного типа. Гравиметры.прямого преобразования состоят из гувствительной системы (крутильных весов), демпферного устройс йа, йарамётрического прбобразойателя, фильтра низких частот и регистрирующего устройства. . . В гравиА«етрах компенсационного ти па имеется, KjpoMe того, ав-гомаГйчёская система силовой компенсации воздействия на чувствительнуй Систему длиннопериодных ускорений. Эта система включает корректирующие иусилительные звенья и обратный электромеханический преобразователь, образуюпдае цепь обратной связи. , Преимущества гравиметра коМпеисгГционного типа перед гравиметрами пря мого преобразования проявляются при измерениях на профилях большой, проiEaasKSSiiiuKETft-iA.;,;,
(Rtt -A Siffffifi ii if ia.
: i «: «4«Si «te f тяженностИ с большим перепадом значений гравитационного ускорения, И те и другие набортные гравиметры являются приборами с очень боль|Шой постоянной времени, т.е. с очень та.пым быстродействием, что приводит }(. большим динамическим погрешностям измерений и препятствует их испс5Льэованию. для детальных гравиМе р и ёских съемок. Цель изобретения - уменьшение динамических погрешностей и, следовательно, повышение деятельности измерений набортными гравиметрами. Это достигается за счет того, что в устройство введены звено последовательной электрической коррекции, подключенное к выходу параметрического преобразователя, два элемента с двухсторонней характеристикой, вход первого из котърых соединен с выходом звена последовательной электриче : кой коррекции непосредственно, а вход второго - через сумматор, ко второму входу которого подключен источник постоянного напряжения, два блока измерения разцрсти длительностей положителиаых и отрицательных участков биполярных импульсов телеграфного кода, входы которых подклю чены,к выходам соответственно первоfo и второго элёментс5в с релейной характеристикой, а выходы - к выходам вычисл:ительного устройства. Если во всех известных гравиметрах низкочастотная фильтрация осуществляется в процессе измерений и предше-ствует регистрации результатов то в предлагаемом устройстве такая (сглаживание) осуществляется на стадии, обработки результатов измерений.
Из этого следует, что предметом изобретения является: электрическое измерительное устройство, которое может использоваться в комНлекте с чувствительными системами известных гравйм ётров. Более того, предлагаемое устройство может подключаться параллельно с электрическими измерительными устройствами известных гравиметров, т.е. функционировать одновременно с ними..
Входным сигналом чувствительной бистемы гравиметра является сумма гравитационного ускорения и превышающих его в, тысячи и десятки, тысяч раз инерционных ускорений, обусловленных качкой судна. Для подавления короткопериодных инерционных ускорений используют низкочастотную фильтрацию, осуществляемую самой измерительной аппаратурой. Так, сботноше- ние. между помехой и полезным сигналом в выходном сигнале чувствительной системы с большой постоянной времени Вчсотни раз -меньше, чем на входа систе№1. Однако и .полезный сиг нМй ГЩ ШЬхождейии через измерительную систему с большой постоянной времени сильно искажается. С другой стороны,известно, что подавлять короткопериодные помехи можно ценой гораздо мейьшего искажения полезного сигнала, если низкочастотную фильтрацию рСущёствлять на стадии обработки результатов измерений. Объясняется это тем, что при такой фильтрации учитываются показания аппаратуры и после того момента времени, для которого определяется значение полезного сигНсша, а при фильтрации в реальном времени, когда анализ сигнала осуществляется одновременно с его измерением, такой возможности нет . ™ ---«---Измерительной аппаратурой с малой постоянной времени регистрируется последовательность амплитуд положительных (A) и отрицательных (д ) выбросов (полуволн) суммарного сигнала определяется последе вательность величин
С-Ч
.,2,3,...,
ьдг(1)
хоторая сглаживается цифровымнизко 65
. i- -
частотным фильтром в соответствии с алгоритмом
Х Р
gn--.. .K.
(2)
где б - Вёсовыё Коэффициенты фильтра, 2Ыф - ширина фильтра. Однако резкое уменишение постоянной времени аппарйту требует соответствующего расширения диапазона измерений при сохранении требуемой точности. Исключительно высокой точностью отличаются измерения интервалов Поэтому основой изобретения является переход от амплитудного анализа сигнала к временному.
Помехи, обусловленные качкой судна, представляют собой узкополосный случайный процесс с симметричным относительно нуля распределением и регистрируется в виде непрерывной последовательности импульсов различной полярности, амплитуды и длительности. Из симмёЧрйи распределения следует, что средние значения длительности положительных и отрицательных импульсов и, определенные на интервале достаточно большой продолжительности , равны друг другу . Если же на этот узкополосный процесс накладываются длиннопериодные гармоники (полезный -сигнал) , то симметрия р аспределения нарушает я,при этомВ - и величина Кг:«t -t- может служить характеристикой полезного сигнала....
Если сигнал x(t ) представляет собой сумму пр тряннргр полезного сйгнайа лд и гармонической помехи
гТГ
yt
как легко убедил9
.21:
1 . л л
itr
А /
ГТ
Отсюда следует, чтр при А 2500 мгл и Т - 6,28 сек для определения дд с точностью 0,5 мгл врем.енные интервалы нужно измерять с точнРстью 0,8 мсек. Измерение интервалов времени порядка нескольких секунд с точнрстью до десятых долей миллисекунд мржнр выпрлнить с помсщью выпубкйёмыхГ промлшленностью электроннр-счетных частотомеров, -.
Когда помеха 2(t ) представляет случайный сигнал и
y.(t Ag-bz(t),
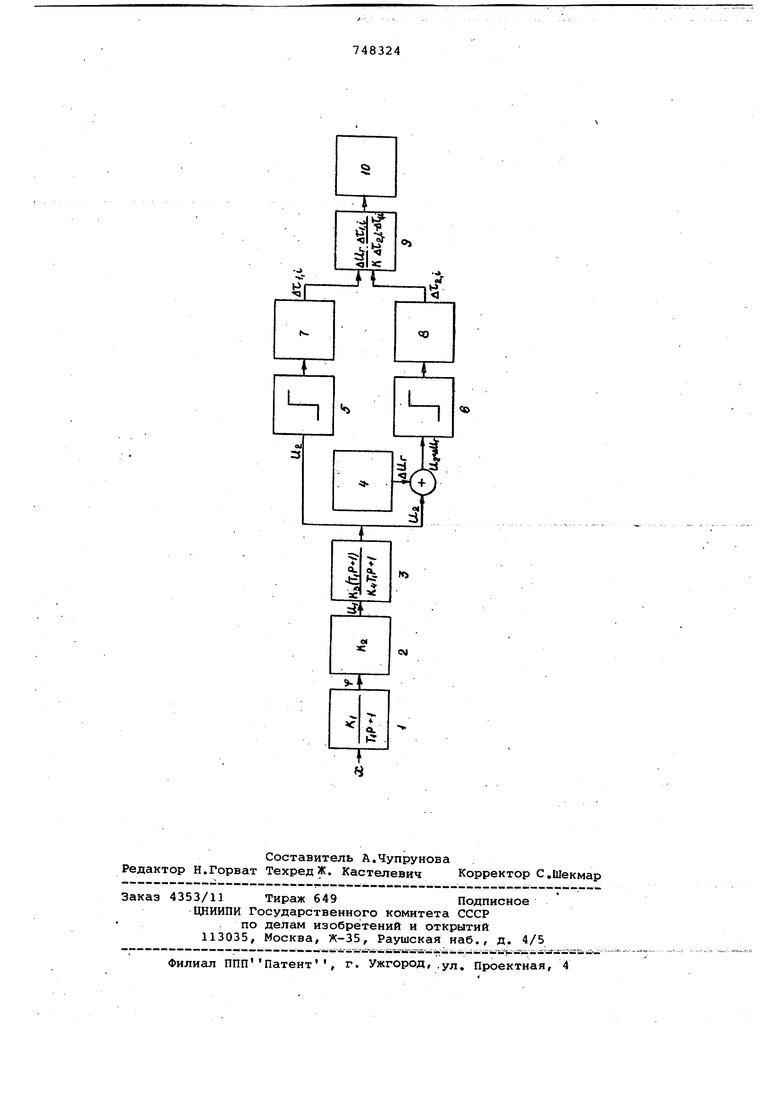
разность между средними на интервале .осреднения длительностями положительных и отрицательных импульсов можно определить через значение фун кции распределения сигнала р при X О : - -гй-Я г- ГУ С - СоП з - л где Т - продолжительность интервал осреднения. Выразим функцию распределения суммарного сигнала FX(X) через функцию распределения -помехи F ( и величину Ад- Имеем очевидное раве (o)-(-) (4 Если наша величина мала по сравнени со среднеквадратичным значением помехи, то. .((о){)о-9-а- -.гК (5 где Wt(2.) - плотность распределения помехи. Из формул (3), (4) и (5) следует д.а.,...|.,, (6) где N-M/T - среднее число импульсов одного знака в единицу времени. Отношение fi/Wj fo) является характеристикой помехи.Если при проведении измерений состояние моря не изменяетсяи помеху можно рассматривать каК13тационарный случайный процесс, тёгйри этом указанное отношение также остается неизменным и следовательно, изменение atr вдоль профиля измерений соответствует изменению 49 Если же помеха не является стационарным случайным процессом и, кроме того, необходимо знать масштаб регистри руемой величины., то можно поступить следующим образом. Параллельно с р.ассмотренными измерениями проводить определения вре менных характеристик случайного про цесса, отличающегося от исходного наличием некоторой известной постоянной составляющей 4Qp . Введение этой составляющей по существу является градУировкой аппаратуры. В сйответствии с (6) при этом будем име ) ) Исключая из этих равенств неизвестную величину N/W (0), получае . , Более эффективной,чем определени средних значений, является низко.час готная фильтрация результатов измерен1|й г которые в рассматриваемом случае должны Сыть представлены в виде последовательности величин ,д.,дд г ДГ,;- Д где At jtTj -ty- разность длительностей положительного и сменяющего его отрицательного импульса, образующих совместно биполярный импульс с определенным порядковым номером; индекс соответствует исходному сигналу, индекс - сигналу, в который введена градуировочная величина., Представление результатов измерений в форме (7) теоретически равноценно представлению в форме (1). Преимущества предлагаемой формы п зедставления результатов измерений обусловлены тем, что измерения длительностей импульсов выполняются с гораздо более высокой точностью, чем измерения их амплитуд. На чертеже представлена функциональ ная схема устройства. Устройство содержит сильнозатушенную чувствительную систему 1 типа крутильных весов, изображаемую, как известно, опериодическим звеном, параметрический преобразователь 2, звено последовательной электрической . коррекции 3, источник 4 постоянного напряжения ди, , элементы 5 и б с двухсторонней релейной характеристикой, блоки 7 и 8 измерения интервалов времени, вычислительное (арифме-, тическое)устройство 9, регистратор 10. Корректирующие звенья с указанной на чертеже передаточной функцией при К; -« 1 используются для повышения быстродействия систем с инерционными элементами типа апериодическогсэ звена, т.е. для расширения частотного диапазона системы в сторЬйу вйсоких частот. Передаточная функция цепи 1-2-3 , . () з i j -T:; K:;V представляет собой апериодическое звено с постоянной времени во много аз меньшей постоянной времени чувствительной системы (,). Сильное демпфирование чyвcтвитeJ ьой системы типа крутильных весов не только выполняет функцию линейного низкочастотного фильтра, но р подавяет нелинейные эффекты (СС - эффект и другие). Электрическая коррекция сигнала система в значительной мере нейтрализует действие демпфирования как линейного низкочастотного фильгра; полезное же действие демпфирования как способа подавления нелинейных эффектов при этом полностью сохраняется В результате в выходном сигнаЛ.е ЗПЭК резко возрастает отношение случайной помехи к полезному сигналу,но зато соответственноуменьщаются искажения полезного ейГНа ла.(по (равнению с ыходным сигналом параметриче ского Преобразователя) . Выходной сигнал эвена последовательной электрической коррекции поступает на- входы релейных элементов 5 и 6, причем на вход б поступает ещё традуировочный сигнал aUp ot источника постоянного напряжения. Значение градуировочного сигнала, приведенное к входусистемы равно: ли, г.К-, гЧ,к,к Релейные элементы преобразуют поступающие на их вход сигналы в телеграфный код, т.е. в непрерывную после довательность биполярных импульсов стандартной амплитуды со случайно распределенными моментами изменение знака, совпадающими с Моментами изменения знака сигнала на входе. Иными словами входным сигналом релейног лемента является знаковая функция , ()3,а релейного элемента б 9.-V Z (t V л. «J pi По определению в-,0пх(1) 1 при X О О при X О. :-1 при о Таким образом, при рассматриваемом подходе измеряется не сам сигнал, а только значение его знаковой функци что существенно облегчает задачу из мерений. .. - . V Указанные выше биполярные прямоугольные импульсы поступают на блоки ИИВ, которые определяют разность меж ду длительностями положительного и отрицательного участка каждого биполярного импульса. Известны различные схемы подобных блоков. В качестве примера сошлемся на схему, согласно которой прямоугольные импульсы запол йяются вь1сокочастоТными импульсами соответствующей полярности с выходов генератора счетных импульсов, а раз ность между числом положительных и отрицательныхсчетных импульсов рпределяется двусторонним реверсивным счетчиком, имеющим схему сброса показаний после прбхЬждения каждого б полярного импульса. Определенные бл измерения интервалов времени в цифро)эой форме величины АТГ;,,, и ,i поступают на вычислительное устройс тво,/ определяющее значения по (7 и 8) , а затем на регистра ор. Последовател;ьность значений A9v -сглаживается по формуле (2) .
8 Итак, мы рассмотрели работу устройства по методу прямого преобразова.ния. Однако такое устройство может работать и в комплексе с гравиметром компенсационного типа (его следует подключить к выходу параметрического преобразователя параллельно собственной электрической системе гравиметра). В этом случае на чувствительную систему помимо полезного сигнала и помех воздействует еще и компенсирующее усилие ддк , которое регистрируется стандартной аппаратурой. Очевидно, что при этом величины , полученные по формуле (2), будут определять не искомые значения да ,а разность &9 т.е. д -л,-дацОтс1ойа следует, что л.д -е. предложенное устройство будет определять динамическую поправку к показаниям гравимеафа компенсационного типа. Формула йэббретёнйя Гравиметр, содержащий чувствительную систему, например, типа крутильных весов с параметрическим преобразователем и регйстрирукадим yctpoйcтвом, отлйЗа тийся тем, что, с целью уменьшения динамических погрешностей, в устройство введены звено последовательной электри ческой коррекции, подключенное к выходу ггараметрнческого преобр эователя, два элемента двухсторонней характеристикой, вхоа йврвогр из которых соединен с ЕИХОдом эвена последовательной электрической коррекции непосредственно, а вход второго - через- сумматор, ко второму входу которого подключен источник постоянного напряжения, двй блока измерения разйЬсти длительностёй положительных и отрйцательнйк учайтков ёйполярных импульсов телеграфного кода, входы кбторых пбдйлюч.ены к йлходам соответственйб ШрвОго и второго элементов с релейной а актерис икой, а Выхода - квходам вычислительного устройства -.-л , ..:., Источники ий-формацин, принятые во йнймадйё йрй экспертизе. 1. Справочник геофизика, т.5, И., Недра,, 1968, 135-137. 2. .Морская геология и геофизика. 3, Мингёо СССР, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения низкочастотных гравитационных сигналов | 1978 |
|
SU771593A1 |
| Вертикальный сейсмометр | 1980 |
|
SU940103A1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2354999C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОЦЕНКИ ЧАСТОТЫ РАДИОИМПУЛЬСОВ | 2004 |
|
RU2267226C1 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2002 |
|
RU2208796C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ЭНЕРГОИНФОРМАЦИОННОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2159009C2 |