1
Изобретение относится к электро1технике и может быть использовано в различных системах автоматики, в частности в системах автоматического 5 регулирования электродвигателей и измерительной технике J
Известен датчик положения ротора, содержащий трансформаторы на статоре, ферромагнитный ротор/ измбюяюсций)Q
при своем вращении магнитную связь между первичной и вторичной обмотка14и Т1)ансформатора, и генератор переменного тока, пит.акпций первичную обмотку трансформатора 1.«с
Известен также датчик положения генераторного типа, содержгиций статор-сердечник с базовойи коллекторной обмотками генератора, воэдущный зазор и вращающийся в за- 0 немагнитный экран в виде полудиска, котора:1й, нщзушая магнитную связь между обмоткаАю, срывает колебания генератора 2.
В этих датчиках информация о по- 25 ложении роторд передается амплитудой выходйого сигнала, которая м6- жет принимать только два дискретных HopMtqpOBaHHuk значения минимальное и максимгшьное|р а промежуточныеЧп
значения lie нормируются. Это, а также снижение частоты поступления информации при снижении частоты вращения ограничивает информационные возможности датчиков и область их применения. .
Наиболее близким по технической сущности к изобретению является датчик угла, содержащий неподвижный трансформатор с воздушным зазором, в котором проходит токопроводящий диск, смонтированный эксцентрично на оси 3 .
При вращении эксцентричного диска в воздушном зазоре между обмотками трансформатора и происходит амплитудная модуляция выходного сигнала частотой вращения. Информация об угловом пож}жении и о частоте вращения оси переедается соответственно фазой и частотой огибающей амплитудно-модулирсванного вьасбдного сигнала. Частота огибающей определяется равенством
F Рб,(1)
те Р - частота огибающей выходного
сигнала; Fjj- частота вращения.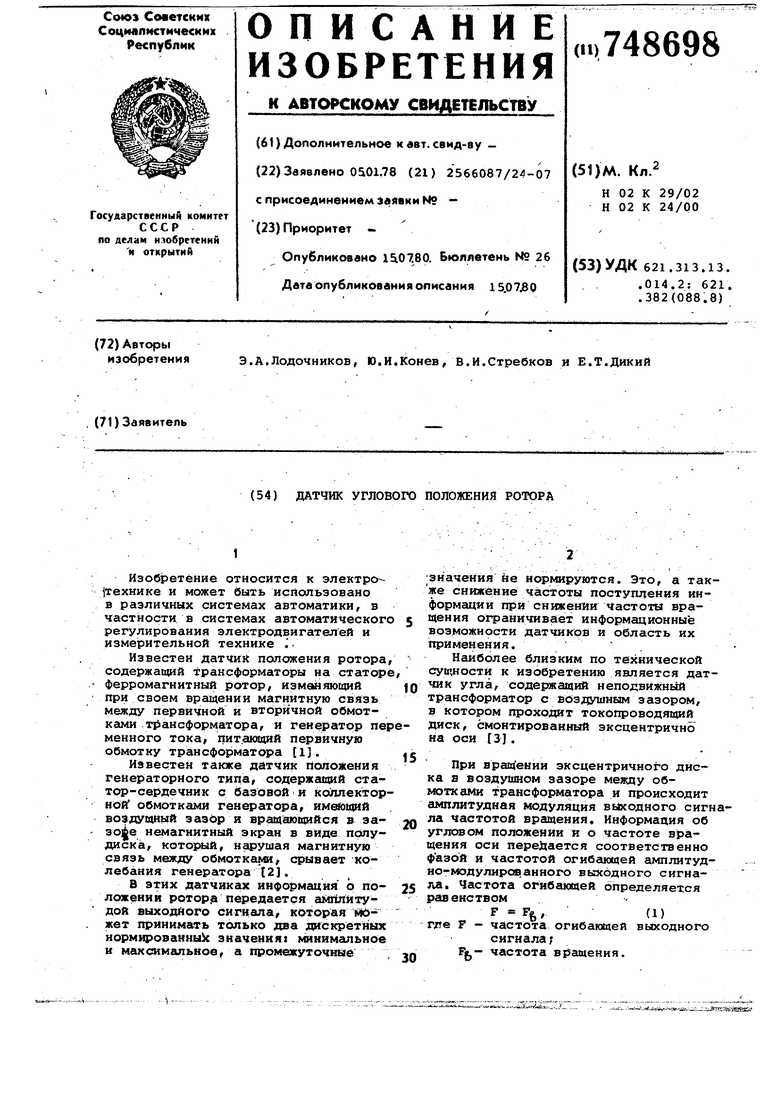
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Трансформаторный датчик положения ротора вентильного электродвигателя | 1976 |
|
SU688966A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Датчик угловых перемещений | 1984 |
|
SU1234725A1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2380814C1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| Стенд для испытания двигателя внутреннего сгорания | 1977 |
|
SU681345A1 |
| Электропривод переменного тока | 1987 |
|
SU1501241A1 |
| Многополюсный вращающийся трансформатор | 1984 |
|
SU1210185A1 |
.
Недс)статком устройства является
д, что при снижении частоты вращеия снижается также частота F, неущая информацию об угловом положеии и частоте вращения, что снижа ет информационную способность датика. Кроме того, датчик не дает инормацию о направлении вращения, что также ограничивает его информационную способность и следовательно возможности его применения (например, в системах фазовой гштоподстройки частоты врадения электродзвигателей) . Цель изобретения - расширение области применения путем увеличения информационной способности.
Это достигается тем, что в датчике УГЛОВОГО положения ротора, содёрйЩём расположенные на статоре с фиксированным углов1э1м сдвигом трансформаторы 6 двумя группами обмоток, установленными с зазором между ниййГ/B KotC pOM расположены профилированный ротор из токопроводящего материала, обмотки одной группы соединены между собой последовательно.
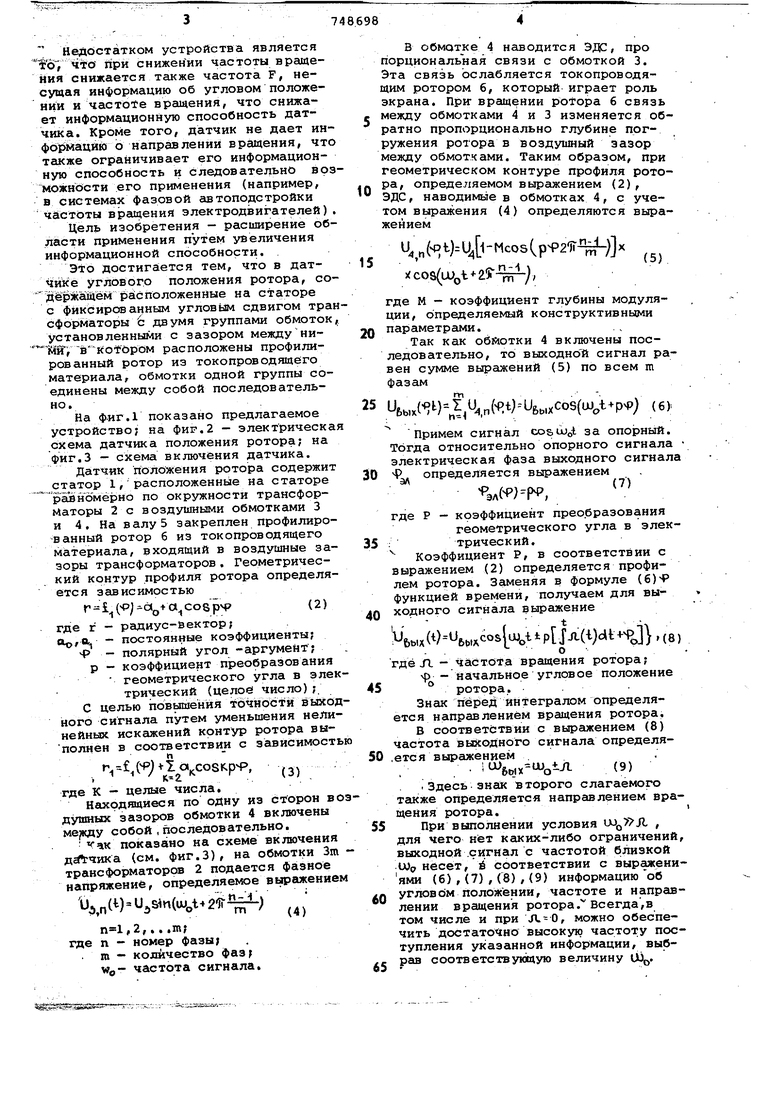
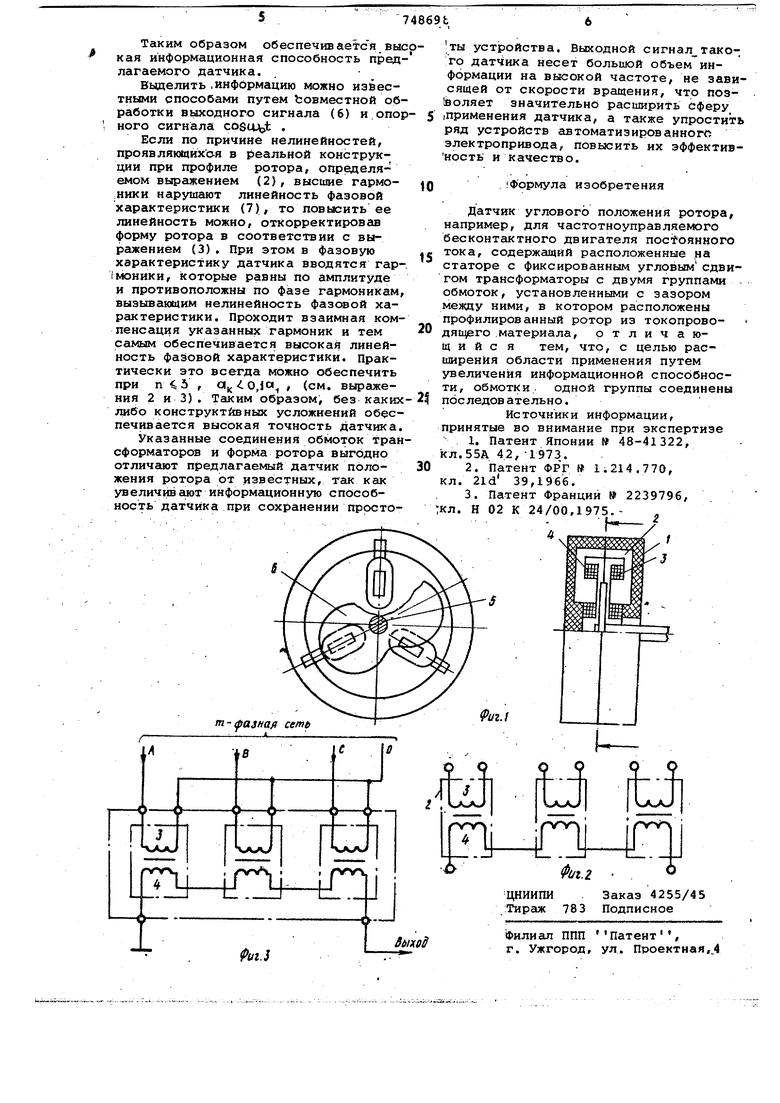
На фиг.1 показано предлагаемое устройство; на фир.2 - электрическая схема датчика положения ротора; на фиг.З - схема включения датчика.
Датчик положения ротора содержит статор 1,расположенные на статоре
равнЪмёрно по окружности трансформаторы 2с воздушными обмотками 3 и 4. На валу 5 закреплен профилированный ротор 6 из токопроводящего материала, входящий в воздушные зазоры трансформаторов. Геометрический контур профиля ротора определяется зависимостью
r-(-p;-c«Q+ct coS|pv(2)
где г - радиус-вектор; аф,8ц - постоянные коэффициенты; 4 - полярный угол -аргумент; р - коэффициент преобразования геометрического угла в электрический (целое число); С целью повьпаенйя о ностй выходного сигнала путем уменьшения нелинейных искажений контур ротора выполнен в соответствии с зависимостью
, -Л(| «кС081 рЧ, (3V,
где К - целые числа.
Находящиеся по одну из воздушных зазоров обмотки 4 включены меркду собой , последовательно.
VW показано на схеме включения дЛчика (см. фиг.З), на обмотки 3т трансФорматорс5В 2 подается фазное напряжение, определяемое выражением
Чn)JiЬ Kt-21ri
,2,..m; где п - номер фазы; .т - количество фаз;
частота сигнала.
We
В обмотке 4 наводится ЭДС, про порциональная связи с обмоткой 3. Эта связь ослабляется токопроводящим ротором 6, который играет роль экрана. При- вращении ротора 6 связь J между обмотками 4 и 3 изменяется обратно пропорционально глубине погружения ротора в воздушный зазор между обмотками. Таким образом, при геометрическом контуре профиля ротоQ Ра, определяемом выражением (2), ЭДС, наводимые в обмотках 4, с учетом выражения (4) определяются выражением
4,n(t)4,l-McosCpS 2jr)x
(5)
xcoa(,
где М - коэффициент глубины модуляции, определяемый конструктивными параметрами.
Так как обйотки 4 включены последовательно, то выходной сигнал равен сумме выражений (5) по всем m фазам
U6,,,,{-Pt),)-U6,,,cosKt p p} (6).
Примем сигнал cosiOoi за опорный. Тогда относительно опорного сигнала электрическая фаза выходного сигнала
Р-. определяется выражением . , Y
Пл№}-Р,
где Р - коэффициент преобразования
геометрического угла в элек:трический.
Коэффициент Р, в соответствии с выражением (2) определяется профилем ротора. Заменяя в формуле (б)-Р функцией времени, получаем для выходного сигнала выражение
,,C°sluUtp |A() , (8)
где л. - частота вргидения ротора; vp - начальное угловое положение ротора.
Знак пёреД интегралом определяется направлением вращения ротора. В соответствии с выражением (8) частота выходного сигнала определя,ется выражением
;. (9)
.Здесь знак второго слагаемого также определяется направлением вращения ротора.
При выполнении условия . , для чего нет каких-либо ограничений, выходной .сигнал с частотой близкой иОр несет, и соответствии с выражениями (6),(7),(8),(9) информацию об
угловом положении, частоте и направлении вращения ротора. всегда,в том числе и при , можно обеспечить достаточно высокую частоту поступления указанной информации, выбрав соответствующую величину Oi.
