1
Изобретение относится к спосо- , бам стабилизации и регулирования скорости электродвигателя, может, быть использовано в технике автоматического управления, в частности, в авто-5 матизированном электроприводе и является усовершенствованием известного способа, описанного в авт. св. ( 511660.
В основном изобретении по авт.св. 0 М .511660 описан способ стабилизации и регулирования скорости электродвигателя, заключающийся в том, что производят включение и отключение электродвигателя в соответствии со 15 знаком фазового рассогласования частот генератора и частотного датчика скорости вращения, регистрируют сближение (расхождение) импульсов частот задающего генератора и частотного 20 Сдатчика скорости вращения на определенный временной интервал и производят включение или отключение электродвигателя, если последний импульс до совпадения (первый после 25 совпадения) приходит соответственно с задающего генератора или частотно.го датчика 1 .
Существенным недостатком известного способа Является наличие длитель- 30
ного режима установления автоколеба- НИИ при выходе на заданную скорость. . Причины возникновения такого режима заключаются в следующем. В режиме установившихся автоколебаний частота импульсов задающего генератора f приблизительно равна частоте импульсов датчика д , фазы, следования этих импульсов также примерно одинаковы. Импульсы д испытывают фазовые колебания относительно импульсов fj. ,обусловленные разгоном двигателя при включении или его торможением - при отключении. При разгоне двигателя импульсы 1д смещаются влево, при торможении - вправо. Интервал времени между импульсами периодически становится меньше определенного времени -Т. Поэтому в режиме установившихся автоколебаний двигатель включают, если последний импульс перед совпадением пришел с задающего генератора и отключают, если п рэьгй импульс после совпадений пришел с частотного датчика.
Непосредственный переход к режиму установившихся автоколебаний при управлении двигателем по известному способу возможен лишь в том случае, когда в процессе выхода двигателя на
заданную скорость будет одновременно достигнуто приблизительное равенство частот f и д и возникает одна из ситуаций,характерензуыщаяся таким же взаимным фазовым ;положением импульсо fp- и д , что и в режиме установившихся автоколебаний. Однако вероятность возникновения именно такой ситуации в момент равенства частот fp и 1д крайне низка, так как начальные значения фазовых координат двигателя (скорости и угла) не опредэлены, а сам двигатель в процессе выхода на заданнуй скорость не управляется (он либо включен, либо отключен). Это означает, что управление двигателем по известному способу практически всегда связано с режимом установления автоколебаний.
. Целью дополнительного изобретения является сокращение времени установления автоколебаний.
Указанная цель достигается тем, что в способе по авторскому свидетельству № 511550 предварительно регистрируют промежутки времени, на которых электродвигатель включен, а импульсы датчика скорости являются ,не первыми после совпадения, выделяоот на этих промежутках импульсы датчика скорости, задерживают выделенные импульсы на время, большее заданного временного интервала и устанавливают нулевой фазовый сдвиг между импульсами задающего генератора и задержанными импульсами.
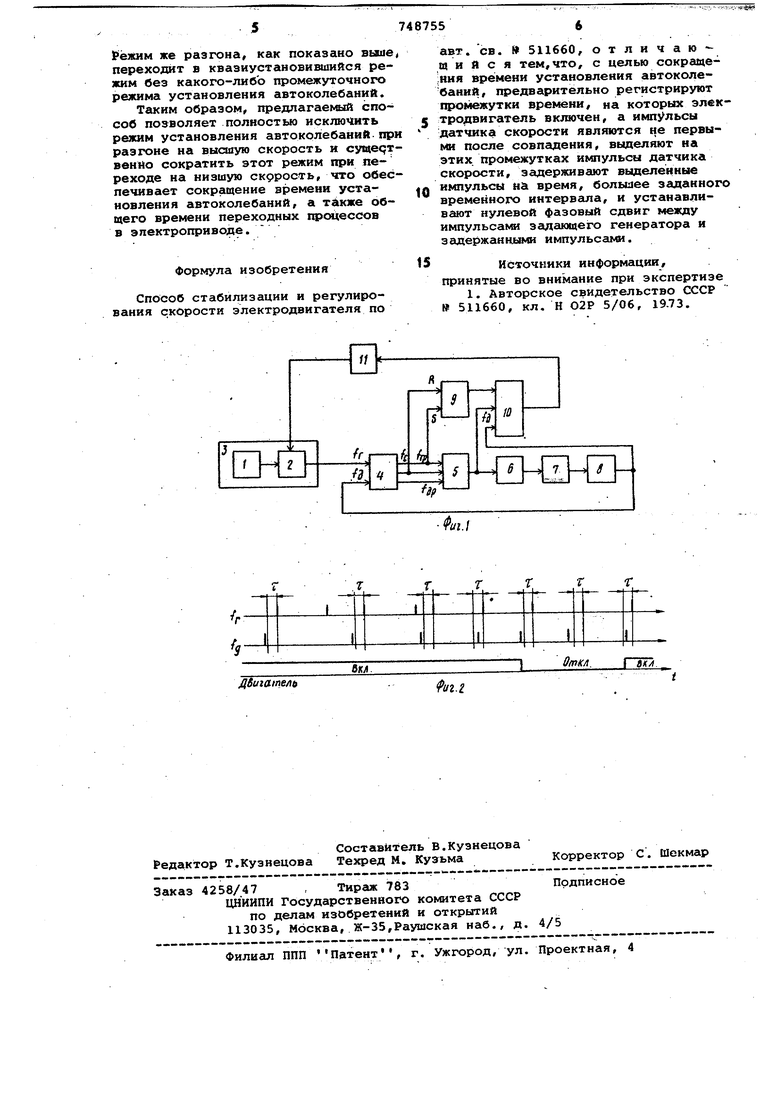
ffa фиг. 1 приведена функциональная схема предлагаемой системы управления двигателем; ria фиг.2 - временные диаграммы, иллюстрирующие предлагаемый способ. I
Система управления двигателем содержит кварцевый генератор 1 и делитель 2 частоты, составляющие задающий генератор 3, схему 4 разделения, логическое устройство 5 фазового сравнения частот, силовой ключ двигатель 7, частотный датчик 8 скорости, R-S триггер 9, коньюнктор 10 , и устройство 11 задержки.
Задающий генератор 3 системы имее возможность установки фазы выходных импульсов путем сброса делителя 2 в состояние, соответствующее формированию выходного .
/Схема 4 разделения пропускает через себя импульсы задающего геHettaTOpa 3 и импульсы д частотного датчика 8 (выходные импульсы обозначены как frp АР ) случае, если интервал времени между входныкш импульсами превышает t , или выдает сигнал совпадения (. в противном случае. Схема 4, разделения регистрирует сближение (расхождение импульсов f и |д на .определенный временной интервал . ; .- Логическое устройство 5 фазового сравнения частот производит включеГнй
и отключение электродвигателя 7 через силовой ключ 6 в соответствии со знаком фазового рассогласования импульсов ЬГР и 1др или в соответствии с принадлежностью первого после совпадения или последнего импульса перед совпадением сигналу задающего генератора 3 или частотного датчика ,8.
R-S триггер 9 совместно сконьюнктором Ю регистрируют промежутки времени, на которых электродвигатель
0 включен, а импульсы датчика являются не первыми после совпадения. Коньюнктор 10 также выделяет импульсы датчика 8 на этих промежутках.
Устройство задержки 11 задержи5вает выделенные импульсы на время, большее заданного временного интервала t .
Режим установившихся автоколебаний, который обеспечивает пред0лагаемый способ, не отличается от описанного в прототипе. Установку фазы импульсов задающего генератора 3 в ЭТОМрежиме не производят, так как при включенном дйигателе импульс fд датчика 8 является первым пос5ле совпадения.
В режиме разгона на высшую скорость (фиг.2) двигатель 7 включен, а импульс д частотного датчика 8 является не первым после совпадения,,
0 поэтому устанавливают фазу импульсов IP задающего генератора 3 таким образом, чтобы эти импульсы отставали, от импульсов д частотного датчика 8 на время, несколько большее
5 заданного Т . После установки фазы задающий генератор 3 продолжает выдавать импульсы с постоянным периодом, соответствующим заданному уровню скорости, вплоть до момента сле0дующей установки. Если скорость двигателя 7 составляет более половины заданной, задающий генератор 3 успевает выдать за время между двумя последовательными установкам фазы один импульс, не вызванный такой
5 установкой. С приближением скорости к заданному уровню этот импульс смещается вправо и приближается к импульсу 1д . В момент сближения упомянутой пары импульсов на время,
0 меньшее заданного Т ,возникает ситуация, характеризующаяся приблизительным равенством частот f и д и совпадением импульсов задающего генератора 3 и частотного датчика 8
5 с точностью до t -типичная ситуа. ция квазиустановившегося режима, который далее и имеет место.
При переходе на низшую скорость двигатель 7 отключен, и фазу импУль-
0 сов задающего генератора 3 поэтому не устанавливают. Однако такой режим весьма, кратковременён,так как снижение скорости двигателя ниже заданного уровня неизбежно приводит
5 к включению двигателя на раэгон.
Рёжим же разгона, как показано выие переходит а квазиустановившийся режим без какого-либо промежуточного режима установления автоколебаний.
Таким образом, предлагаекклй способ позволяет полностью исключить режим установления автоколебаний при разгоне на высшую скорость и сувде 5твенйо сократить этот режим при переходе на низшую скррость, что обеспечивает сокращение времени установления автоколебаний, а тг1кже общего времени переходных процессов в электроприводе.
Формула изобретения
Способ стабилизации и регулирования скорости электродвигателя по
авт. св. № 511660, отличающийся тем,что, с целью сокраще;1шя времени установления автоколебаний, предварительно регистрируют промежутки времени, на которых электродвигатель включен, а импульсы датчика скорости являются не первыми после совпадения, выделяют на этих, промежутках импульсы датчика скорости, задерживают выделенные импульсы на время, большее заданного временного интервала, и устанавливают нулевой фазовый сдвиг между импульсами згщающего генератора и задержанными импульсами.
5 источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР 511660, кл, Н 02Р 5/06, 19.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации и регулирования скорости электродвигателя | 1973 |
|
SU511660A1 |
| Способ управления электродвигателем | 1978 |
|
SU875564A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей | 1980 |
|
SU902189A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| Устройство для регулирования скорости электропривода | 1988 |
|
SU1539725A1 |
| Стабилизатор скорости электродвигателя | 1985 |
|
SU1291938A1 |
| Стабилизатор скорости электродвигателя | 1978 |
|
SU788081A1 |
| Электропривод постоянного тока | 1982 |
|
SU1080242A1 |
| Стабилизированный электропривод | 1989 |
|
SU1624649A1 |
ДВигател
иг.г
