(54) УСТРОЙСТВО ДЛЯ СОГЛАСОВАНИЯ УГЛОВОГО
ПОЛОЖЕНИЯ СИНХРОННО-ВРАЩАЮЩИХСЯ ВАЛОВ
ЭЛЕКТРОДВИГАТЕЛЕЙ
1
Изобретение относится к электротехнике и может быть использовано для согласования углового положения синхронно-вращающихся валов, например, в системах электрического вала, в установках видео и звукозаписи.
Известно устройство, где для ускорения процесса синхронизации дополнительно используется вспомогательный генератор, частота которого меньще частоты опорного генератора. Выход вспомогательного генератора соединен с первым входом триггера, на второй вход которого подключен выход импульсного датчика скорости, выход триггера соединен со входом схемы совпадения, на другой вход которого поступают импульсы с импульсного датчика скорости, а выход схемы совпадения соединен с входом фазового детектора системы фазовой автоподстройки частоты вращения.
В процессе разгона двигателя до скорости, когда частота импульсного датчика скорости меньще частоты вспомогательного генератора, синхронизатор запрещает прохождение импульсов импульсного датчика скорости, но разрещает прохождение импульсов опорного генератора. Триггерный
фазометр системы фазовой автоподстройки частоты находится в состоянии «О и двигатель разгоняется при максимальном сигнале управления. Если скорость двигателя достигает значения, при котором частота
5 импульсного датчика скорости двигателя будет больще частоты вспомогательного генератора, триггер переводится в другое состояние и синхронизатор снимает запрет со схемы совпадения и фазовый детектор начинает работать в режиме синхронизации, обеспечивая синхронизацию частоты импульсного датчика скорости двигателя по отнощению к частоте опорного генератора. Рассматриваемое устройство обеспечивает форсированное согласование частоты импульсного датчика скорости двигателя до скорости вращения, близкой к частоте опорного генератора, а затем вступает в работу схема фазовой автоподстройки частоты, вращение которой подтягивает скорость двигателя до полного равенства входных час-,
20 тот фазового детектора 1.
Однако, в этом устройстве процесс разгона не контролируется по углу и двигатели, разгоняясь до синхронной скорости, проходят различные пути, что приводит к различным угловым положениям валов синхронизируемых машин.
Наиболее близким к предлагаемому является устройство, содержащее генератор опорной частоты, выход которого подключен к системе фазовой автоподстройки частоты вращения первого электродвигателя и к первому коммутируемому входу управляемого ключа, выход которого подключен ко входу системы фазовой автоподстройки частоты вращения второго электродвигателя, выход системы фазовой подстройки частоты вращения первого электродвигателя подключен через последовательно соединенные первый преобразователь и элемент НЕ к первому входу первого элемента совпадения, выход системы фазовой автоподстройки частоты вращения второго электродвигателя подключен через последовательно соединенные второй преобразователь и одновибратор коротких импульсов ко второму входу первого элемента совпадения, выход которого подключен ко входу установки нуля триггера, выход триггера подключен к управляющему входу управляе1мого ключа, второй элемент совпадения, выход которого подключен к входу установки единицы триггера, и вспомогательный генератор 2.
Датчики углового положения валов вырабатывают один импульс за оборот и контролируют угловое положение валов синхронно-вращающихся электродвигателей.
При включении приводов происходит установка триггеров в нулевое положение, и каждая из систем фазовой автоподстройки частоты управляется от отдельного генератора. Частота задающих генераторов отличается, поэтому после синхронизации приводом имеет место взаимное угловое перемещение валов электродвигателей. Скорость перемещения зависит от разницы частот задающих генераторов и, чтобы согласование заверщалось за один период сближения импульсов, необходимо ширину щели датчиков положения валов электродвигателей выбирать из условия
AdL ь AcJflT,t)
где Аа)д - разница между скоростями первого и второго двигателя; Т - период вращ.ения двигателя, скорость которого наибольшая.
Чтобы процесс первого согласования валов происходил быстро необходимо выбирать достаточно большим, но это уменьщает точность первого согласования. После . первого согласования на выходе третьей ячейки совпадения появится импульс, который приведет к опрокидыванию второго триггера в положение единица и подключению входа системы фазовой автоподстройки частоты вращения второго двигателя к выходу второго вспомогательного генератора, частота которого близка частоте опорного генератора. После синхронизации второго электродвигателя начинается медленное сближение передних фронтов импульсов датчиков угловых положений валов. Допустимая разница скоростей двигателей на втором этапе сближения не велика и не должна превышать величины
-||-.(2)
где Z - число штрихов импульсного датчика скорости.
В рассмотреном устройстве время сближения ограничивается в основном вторым этапом, где разницу скоростей нельзя взять
с значительной, не потеряв точности углового согласования валов. Уменьшить длительность второго этапа можно достичь уменьшением ширины щели датчиков углового положения валов электродвигателей. Однако это потребует уменьшения разницы скоростей первого этапа сближения и пр-иведет к увеличению времени первого этапа сближения.
Таким образом время согласования по углу синхронно-вращающихся валов в устройстве ограничено на определенном минимальном уровне и yMeHbQJHTb его принципиально невозможно.
Цель изобретения - увеличение точности и быстродействия процесса согласования углового положения синхронно-вращающихся валов электродвигателей.
Поставленная цель достигается тем, что в устройство дополнительно введены фазовый детектор, усилитель-преобразователь, а вспомогательный генератор выполнен управляемым по частоте, выход вспомогательного генератора подключен к второму коммутируемому входу управляемого ключа, а вход к выходу усилителя-преобразователя, вход которого подключен к выходу фазового детектора, входы которого подключены к входам второго элемента совпадения и к выходам первого и второго преобразователей соответственно.
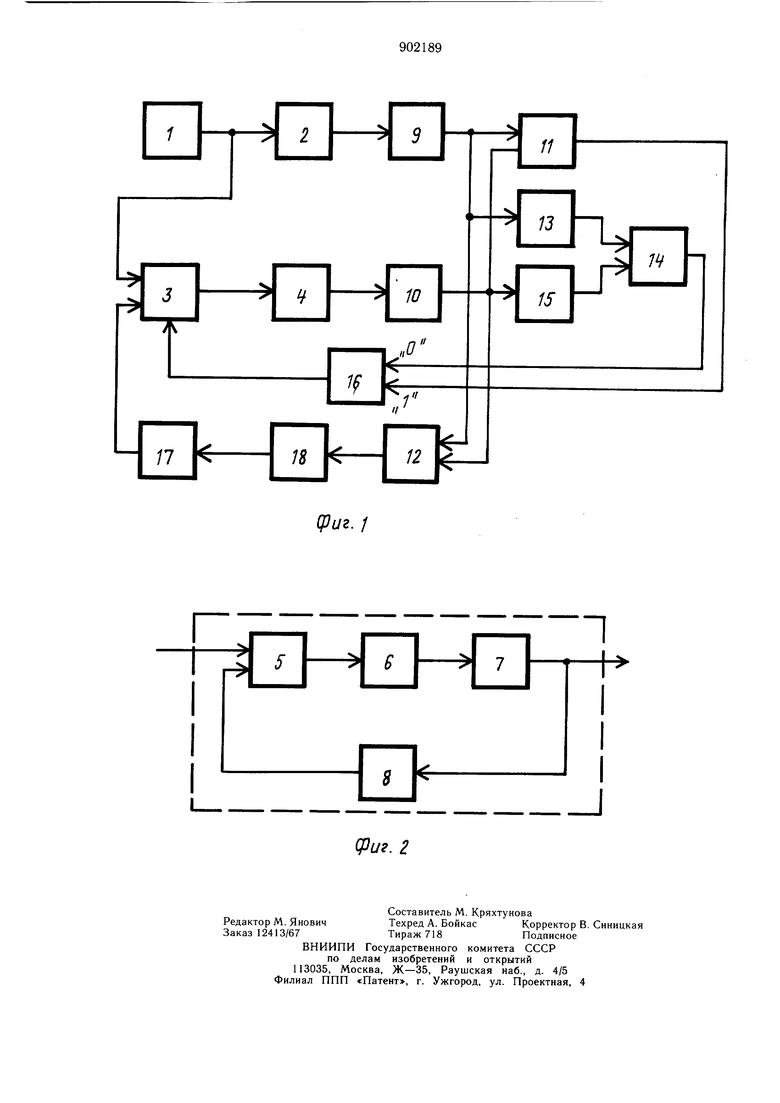
На фиг. 1 и 2 представлены блок-схемы устройства.
Устройство содержит генератор 1 опорной частоты, выход которого соединен с входом системы 2 фазовой автоподстройки частоты вращения первого двигателя и через управляемый ключ 3 с входом системы 4 фазовой автоподстройки частоты вращения второго двигателя. Каждая из систем автоподстройки имеет стандартную структуру (фиг. 2) и состоит из фазового детектора 5, усилителя 6 мощности, двигателя 7 постоянного тока, на валу которого размещен импульсный датчик 8 скорости и обеспечивает регулирование скорости двигателя по разности фаз между сигналами опорного генератора и импульсного датчика скорости. Импульсные датчики скорости обоих приводов имеют дополнительные преобразователи
9 и 10 углового положения валов, которые формируют одиночные импульсы за каждый оборот вала двигателей. Выход преобразователя 9 угла соединен с первым входом элемента 11 совпадения, с первым входом фазового детектора 12 и через элемент НЕ 13 с первым входом элемента 14 совнадения. Выход преобразователя 10 угла соединен со вторым входом элемента I1 совпадения, со вторым входом фазового детектора 12 и через одновибратор 15 коротких импульсов со вторым входом э.темента 14 совпадения. Выход элемента 11 совпадения подключен к входу установки «1 триггера 16 и выход элемента 14 совпадения соединен с входом установки «О триггера 16, выход которого подключен к управляющему входу ключа 3. Второй вход ключа 3 соединен с выходом управляемого генератора 17, вход которого подключен через усилитель-преобразователь 18 к выходу фазового детектора 12. Работает устройство следующим образом. При включении приводов подается питание на блоки управления и осуществляется установка триггера 16 в нулевое положение. При этом на вход системы. 2 фазовой автоподстройки поступает сигнал с выхода опорного генератора 1, а на вход системы 4 фазовой автогодстройки - сигнал с выхода вспомогательного управляемого генератора 17, так как при нулевом положении триггера 16 через управляемый ключ 3 проходит сигнал только с выхода управляемого генератора 17. При трогании с места приводов импульсы преобразователей углов первого и второго двигателей в общем случае имеют фазовый сдвиг и на выходе фазового детектора 12 появляется сигнал, пропорциональный фазовому сдвигу этих импульсов. Напряжение фазового детектора 12 проходит через усилитель-преобразователь 18, в котором формируется управляющий сигнал постоянного тока и попадает на вход вспомогательного управляемого генератора 17. На выходе управляемого генератора 17 устанавливается выходная частота, пропорциональная управляющему сигналу с выхода усилителя 18, т.е. пропорциональная фазовому сдвигу между входными импульсами фазового детектора 12. Если импульсы преобразователей 9 и 10 угла сдвинуты значительно друг относительно друга, то на выходе фазового детектора 12 и соответственно на выходе усилителя-преобразователя 18 появляется значительный по уровню сигнал управления, который задает на выходе управляемого генератора 17 частоту, существенно отличающуюся от частоты задающего генератора 1. В результате синхронизируемые по входным частотам привода работают с различными скоростями и обеспечивают форсированное согласование углового положения валов первого и второго двигателя. По мере устранения углового рассогласования валов первого и второго двигателей уменьшается фазовый сдвиг между импульсами преобразователей 9 и 10 угла и сигнал на выходе фазового детектора 12 также уменьщается. Это приводит к уменьщению управляющего напряжения на входе управляемого генератора 17 и к изменению частоты на его выходе, которая приближается к частоте задающего генератора. Разница в скоростях вращения двигателей также уменьщается по мере приближения импульсов преобразователей 9 и 10 угла друг к другу. На заверщающем этапе допустимая скорость сближения импульсов не должна превышать величины .(Ъ в противном случае согласование импульсов датчиков углового положения обоих приводов может не произойти на одном периоде сближения импульсов и процесс синхронизации будет занимать несколько периодов с повторением описанных ниже этапов работы схемы. Соответственно, допусти.мые величины расстройки по частоте задающего генератора 1 и вспомогательного управляемого генератора 17 в конце сближения импульсов датчиков углового положения валов не должны превыщать величины, определяемой неравенствомZAaC ДС 1-1Т$ Т Минимальная величина угла синхронизации, т.е. максимальная точность синхронизации, определяется щириной щели преобразователей 9 и 10 угла, которая равна одной дискрете и.мпульсного датчика 8 скорости. В этом случае синхронизация валов возможна в пределах периода квантования импульсного датчика скорости и угловая ошибка взаимного расгюложения валов не превышает величины Применительно к рассматриваемому предельному случаю углового согласования валов с минимальной погрешностью, равной - рад, рассогласование по частоте задающего генератора 1 и вспомогательного управляемого генератора 17 в конце интервала сближения импульсов преобразователей 9 и 10 не превыщает величины ди;,..-.4. В противном случае угловое согласование валов происходит в течение нескольких интервалов сближения до совпадения во времени импульсов преобразователей 9 и 10 угла. Когда импульсы, получаемые на выходе преобразователей 9 и 10, приходят одновременно на входы элемента 11 совпадения, последний срабатывает и на его выходе появляется импульс, который переключает триггер 16 в состояние «1. С появлением сигнала на выходе триггера 16, происходит коммутация входов ключа 3 и система 4 фазовой автоподстройки переводится на управление от задающего генератора 1. После завершения переходного процесса, двигатели вращаются синхронно и синфазно с угловым рассогласованием, непревышающем одной дискреты импульсного датчика скорости.
В случае выхода любой системы электропривода из синхронизма и нарушения углового положения валов двигателей импульсы преобразователей 9 и 10 угла расходятся между собой. При этом импульс на выходе элемента НЕ 13 совпадает во времени с коротким импульсом одновибратора 15 и на выходе элемента 14 совпадения появляется сигнал, который переключает триггер 16 в нулевое положение. Далее срабатывает ключ 3 и система 4 фазовой автоподстройки переводится на управление от вспомогательного управляемого генератора 17.
В зависимости от величины (разового сдвига импульсов преобразователей 9 и 10 угла устанавливается частота на выходе управляемого генератора 17, при которой обеспечивается предельно-допустимая скорость отработки углового рассогласования валов. Если рассогласование валов по углу велико, на выходе вспомогательного управляемого генератора 17 устанавливается частота, существенно отличающаяся от частоты задающего генератора 1. По мере уменьшения углового рассогласования валов изменяется частота управляемого генератора 17 и скорость отработки углового рассогласования уменьшается, стремясь к предельно-допустимой величине, определяемой неравенством (3). В этом случае процесс углового согласования валов проходит в течение одного интервала сближения и при первом совпадении во времени импульсов преобразователей 9 и 10 угла происходит подключение входа системы 4 фазовой автоподстройки к выходу опорного генератора 1. С этого момента обеспечивается синхронно-синфазное движение электроприводов при угловом рассогласовании валов, непревышающем одной дискреты импульсного датчика скорости.
Таким образом устройство позволяет получить минимальное время согласования углового положения валов, так как процесс согласования происходит с большими скоростями сближения и по мере уменьшения угла рассогласования скорость сближения уменьшается, приближаясь к предельно-допустимой минимальной величине
--Z5L
Аси
дмин
- ZT
Это позволяет получить высокую точность углового согласования валов и завершить процесс сближения за один период.
Формула изобретения
Устройство для согласования углового
положения синхронно-вращающихся валов электродвигателей, содержащее генератор опорной частоты, выход которого подключен к системе фазовой автоподстройки частоты
вращения первого электродвигателя и к первому коммутируемому входу управляемого ключа, выход которого подключен ко входу системы фазовой автоподстройки частоты вращения второго электродвигателя, выход системы автоподстройки частоты вращения первого электродвигателя подключен через последовательно соединенные первый преобразователь и элемент НЕ к первому входу первого элемента совпадения, выход системы фазовой автоподстройки частоты вращения второго электродвигателя подключен через последовательно соединенные второй преобразователь и одновибратор коротких импульсов ко второму входу первого элемента совпадения, выход которого подключен ко входу установки нуля триггера, выход триггера подключен к управляющему входу управляемого ключа, второй эле.мент совпадения, выход которого подключен к входу установки единицы триггера и вспомогательный генератор, отличающеес- . .м, что, с целью увеличения точности и быстродействия, в него дополнительно введены фазовый детектор, усилитель-преобразователь, а вспомогательный генератор выполнен управляемым по частоте, выход вспомогательного генератора подключен к второму ко.ммутируемому входу управляемого ключа, а вход - к выходу усилителя-преобразователя, вход которого подключен к выходу фазового детектора, входы которого подключены к входам второго элемента совпадения и к выходам первого и второго преобразователей соответственно.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 467440, кл. Н 02 Р 5/06, 1960.
2.Авторское свидетельство СССР по заявке № 2706691/24-07, кл. Н 02 Р 5/06, 1979.
Cpuz.1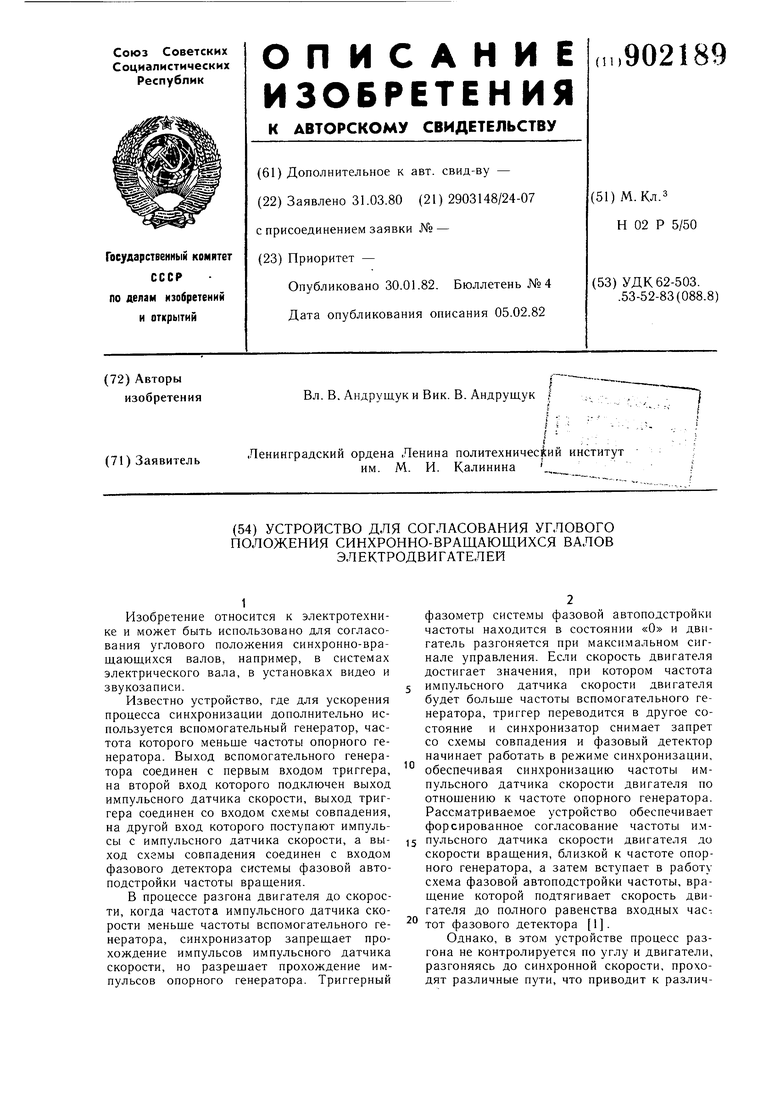

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для согласования угловогопОлОжЕНия СиНХРОННО ВРАщАющиХСяВАлОВ элЕКТРОдВигАТЕлЕй | 1979 |
|
SU834822A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| Устройство для разметки магнитного барабана на равные интервалы | 1981 |
|
SU966727A1 |
| Центрифуга | 1978 |
|
SU744332A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Устройство управления пьезоэлектрическим двигателем | 1978 |
|
SU765911A1 |
| Датчик углового положения,скорости и ускорения вращения вала | 1981 |
|
SU994990A2 |
| Электропривод переменного тока | 1988 |
|
SU1767689A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |