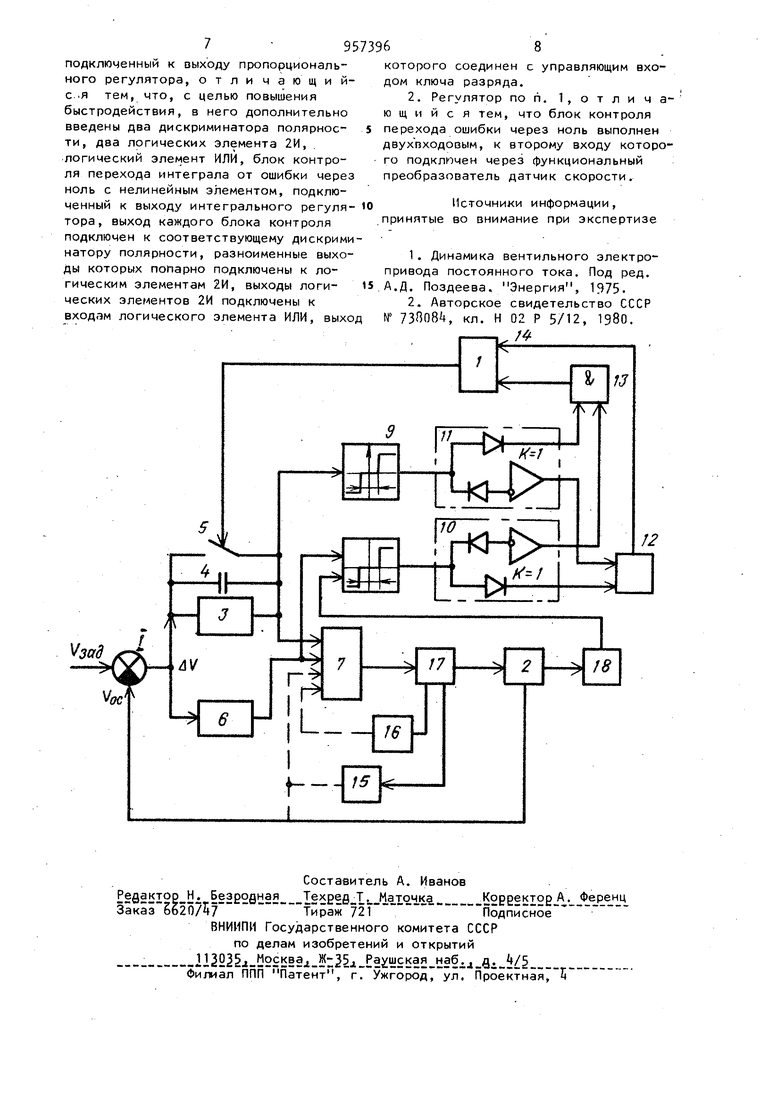
ключа разряда интегрального регулятора. Недостатки известного устройства связаны с применением нелинейного элемента с гистерезисом, запоминающим полярность предыдущего возмущающего воздействия, превышающего поло вину ширины петли нелинейного элемен та, хотя при сигнале ошибки меньшем половины петли нелинейного элемента свойства узла обнуления (способность в формировании импульса сброса) долж ны быть симметричны. Необходимо также отметить, что при ошибках по скорости, меньших по модулю половины петли нелинейного элемента, полярность выходного сигна ла интегрального канала может быть лю бой, т.е. в момент обнуления интегратора полярность пропорциональной составляющей ошибки и интеграла от ошиб ки на выходе интегрального регулятора могут совпадать и не совпадать. В первом случае нет смысла обнулять интегратор, а во втором это необходиМО для повышения быстродействия. Цель изобретения - повышение быстродействия регулятора скорости электропривода. Поставленная цель достигается тем что в известное устройство дополнительно введены два дискриминатора полярности, два логических элемента И, логический элемент ИЛИ и блок контроля перехода интеграла от ошибки через ноль с нелинейным элементом, подключенный к выходу интегрального регулятора, выход каждого блока контроля подключен к соответствующему дискриминатору полярности, разноименные выходы которых попарно подклю чены к логическим элементам 2И, выходы логических элементов 2И подключены к входам логического элемента ИЛИ выход которого соединен с управляющим входом ключа разряда. Кроме того блок контроля перехода ошибки через ноль выполнен двухвходовым, ко второму входу которого подключен через функциональный преобразователь датчик скорости. На чертеже представлена структурная схема регулятора скорости электро привода. Регулятор состоит из сумматора 1, первый вход которого подключен к датчику 2 скорости электропривода, например тлхогенератору, а второй яв-ляется входом устройства, выход сумматора 1 подключен к входам интегрального 3 с конденсатором А, шунтируемым управляемым ключом 5 разряди, и пропорционального 6 регуляторов, выходы которых подключены к преобразователю 7 блок 8 контроля перехода ошибки через ноль с нелинейным элементом, подключенный к выходу пропорционального регулятора 6, блок 9 контроля перехода интеграла от ошибки через ноль с нелинейным элементом, подключенный к выходу интегрального регулятора 3, выход каждого блока 8 и 9 контроля подключен к соответствующему дискриминатору 10 и 11 полярности, разноименные выходы которых попарно подключены к входам логических элементов 2И 12 и 13, выходы логических элементов 2И 12 и 13 подключены к входам логического элемента ИЛИ , выход которого соединен с управляющим входом ключа 5 разряда. Ко входу преобразователя 7 подключены датч чики ЭДС 15 и датчик 16 статического момента электродвигателя, выход преобразователя 7 подключен к электродвигателю 17. Вь1ход датчика 2 скорости подключен к функциональному преобразователю 18, выход которого подключен ко второму входу блока 8 контроля перехода ошибки через ноль. Регулятор работает следующим образом. Сигнал ошибки регулирования дУ, равный разности сигнала задания скорости У;.и сигнала обратной связи по скорости Vpj, , с выхода узла сравнения I поступает на пропорциональный 6 и интегральный 3 регуляторы. Полученные таким образом сигналы управления U и УЗ поступают на вход преобразователя 7 и на входы блоков 8 и 3 соответственно. Уравнение якорной цепи вентильного электропривода постоянного тока по средним значениям за i-й интервал вентильности имеет следующий вид: аГ.,,, 1 алин| астИ. di а; среднее значение динамического тока на i-м интервале вентильности; среднее значение статического тока на i-м интервале вентильности; и,. - среднее значение напряжения преобразователя на i-м инте вале вентильности; F.,, - среднее значение ЭДС двигателя на i-M интервале вен тильности. Сигналу и, соответст.оует в общем слу чае некоторый сигнал управления Uljzr б. bi(2) 4sr lJ6.+J3i lJ|5 U,6. (2) для случая линеаризованного преобразователя 7 и введения компенсационны обратных связей через датчики 15 и 16, В общем случае, сигнал управлени по (2) используется для формирования полного значения Ui- по (1), причем составляющие его соответствующие Е и 1,., задаются обычно некоторой долей сигнала 114 (для обеспечения аста тизма на интеграторе 3 накапливается определенная доля сигнала U-, ком пенсирующая уходы нулей усилителей и других узлов прямого тракта системы регулирования скорости, изменение параметров прямого тракта в процессе работы и т.д.} В случае линеаризованного преобра.-зователя и введения компенсационных сигналов , ,;j по (2 ) выходной сигнал при прочих равных условиях снижается. Однако наряду с полезными сигналами на вход регулятором поступают помехи определенного уровня. В связи с этим для получения досто верной информации о полярности ошибки в данный момент применен блок 8 с зоной нечувствительности, превышающей уровень входных помех. Зона нечувствительности должна также превышать ошибки регулятора скорости в. режиме очень малых возмущений, в режиме стабилизации скорости без возмущений по нагрузке. При широком изменении скорости зона нечувствительности блока 8 контроля перехода ошибки через ноль меняется в зависимости от сигнала датчика 2 скорости, поступающего на блок 8 через функциональ-, ный преобразователь 18. Известно также, что при возмущающих воздействиях вначале пропорциональный и интегральный регуляторы 6 и 3 работают согласно, но при переходе ошибки через ноль сигнал U меняет Знак, а сигнал не меняет. В связи с этим сигнал с выхода интегратора препятствует оперативной корректиров966ке движения привода (вносит инерцию).. Поэтому в регуляторе контролируется полярность сигналов 1) , Ug при превышении зон нечувствительности, соответственно, с тем, чтобы обнулять интегральный регулятор тогда, когда он вносит инерцию в зоне существенных возмущающих воздействий и увеличивает перерегулирование. Для этого сигналы U и УЗ подаются на блоки 8 и 9 контроля, а их выходные сигналы поступают на входы дискриминаторов 10 и 11 полярности, которые формулируют на одном из двух выходов единичные логические сигналы в зависимости от полярности сигналов (в случае Ug О или U 8 единичных сигналов на выходе дискриминаторов 10 и 11 нет). Для выявления ситуации, когда полярности сигналов и и U не совпадают, разноименные выходы подключены на входы логических элементов 2lt 12 и 13, Формирование единичного си|- нала на выходе логических элементов 2И 12 и 13 говорит о наличии такой ситуации , Для полно11 оценки ситуации введен логический элемент ИЛИ 1, выходной единичный сигнал которого дает команду на замыкание ключа 5 и разряд конденсатора и интегрального регулятора 3. Как только сигнал Uj меньше зоны нечувствительности блока 9 контроля - ключ 5 размыкается. Применение регулятора скорости электропривода обеспечивает повышение качества переходного процесса и сокращение времени регулирования ро сравнению с известными пропорционально-интегральными регуляторами. Регулятор повысит динамические характеристики электроприводов и технические характеристики механизмов, на которых он будет применен. Формула изобретения 1. Регулятор скорости электропривода, содержащий сумматор, первый вход которого подключен к датчику скорости электродвигателя, а второй является входом регулятора, выход сумматора подключен к входам интегрального, с управляемым ключом разряа, и пропорционального регуляторов, выходы которых подключены к преобразователю, блок контроля перехода ошибки через ноль с нелинейным элемрнт.м.
подключенный к выходу пропорционального регулятора, отличающийс .я тем, что, с целью повышения быстродействия, в него дополнительно введены два дискриминатора полярноети, два логических элемента 2И, логический элемент ИЛИ, блок контроля перехода интеграла от ошибки через ноль с нелинейным элементом, подключенный к выходу интегрального регулятора, выход каждого блока контроля подключен к соответствующему дискриминатору полярности, разноименные выходы которых попарно подключены к логическим элементам 2И, выходы логических элементов 2И подключены к входам логического элемента ИЛИ, выход №
которого соединен с управляющим входом ключа разряда.
2. Регулятор по п. 1, о т л и ч аю щ и и с я тем, что блок контроля перехода ошибки через ноль выполнен двухпходовым, к второму входу которого подключен через функциональный преобразователь датчик скорости.
Источники информации, принятые во внимание при экспертизе
1. Динамика вентильного электропривода постоянного тока. Под ред.
15 А.д. Поздеева. Энергия, 1975.
2. Авторское свидетельство СССР 73308, кл. Н 02 Р 5/12, igBO.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости для вентильного электропривода постоянного тока | 1977 |
|
SU738084A1 |
| Устройство для управления вентильным преобразователем | 1981 |
|
SU987779A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| Бесконтактный задатчик скорости | 1982 |
|
SU1107739A1 |
| Устройство сравенения дискретного регулятора | 1974 |
|
SU658524A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Вычислительное устройство для систем управления вентильными электроприводами | 1977 |
|
SU746598A1 |
| Электропривод с адаптивным регулятором скорости | 1988 |
|
SU1541749A1 |
| Способ раздельного управления реверсивным вентильным электроприводом и устройство для его осуществления | 1984 |
|
SU1354377A1 |
| СПОСОБ РОВЕНСКОГО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1990 |
|
RU2109396C1 |
