(54) ЗУБООБРАБАТЫВАЮЩИЙ СТАНОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический дозатор | 1976 |
|
SU606266A1 |
| Устройство для формования катушек | 1972 |
|
SU480319A1 |
| Привод подач шлифовального станка | 1980 |
|
SU931433A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Упор-демпфер станка | 1979 |
|
SU863193A1 |
| ШАРОВОЙ КРАН | 1990 |
|
RU2011087C1 |
| Пневмогидравлический привод | 1981 |
|
SU950964A1 |
| Привод подач шлифовального станка | 1988 |
|
SU1664534A1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
1
Изобретение относится к области станкостроения и может быть применено в станках для финишной обработки или контроля зубчатых колес.
Известен контрольно-обкатный (притирочный) станок с устройство.м ручного торможения, предназначенным для приложения тормозного момента к ведомому шпинделю, он создается усилием оператора и передается на смонтированные на ведомом шпинделе тормозные диски или колодки с помош.ью рычажных Или гидравлических передач. Отсчет тормозного момента ведется либо по току нагрузки на главном двигателе, либо по отклонению подпружиненных тормозных КО.1ОДОК от положения равновесия 1.
Недостлтком такого станка является то, что он недостаточно точен и не создает стабильного тормозного момента.
Известен зубообрабатываюший станок, содержащий в бабках станины ведущий шпиндель и оснащенный тормозным механизмом ведомый и1Г индель, управляющий следящий механизм, воздействующий через исполнительный механизм на тормозной механизм, связанный с управляющим следящим механизмом 2.
Недостатко.м известного станка является его сложность, обусловленная тем, что все элементы следящего механизма выполнены 5 на элементах элeктpoник.
Целью изобретения является упрощение конструкции станка.
Это достигается тем, что управляющий следящий механизм выполнен в виде золотникового гидрораспределителя, исполнительный механизм - в виде пневмогидравлического цилиндра, а тормозной механизм связан гидрораспределителем через сбалансированную передачу, при этом пневмополость пневмогидравлического цилиндра связана с магистралью сжатого воздуха и с тормозны.м механизмо.м.
Пневмополость пневмогидравлического цилиндра разделена на две камеры мембраной, связанной со иггоком гидроцилиндра, в
20 одной из которых размещен подпружиненный относительно корпуса двойной клапан, щток которого связан с мембраной, а в другой - пружина с усилителем, большим усилия пружины клапана.
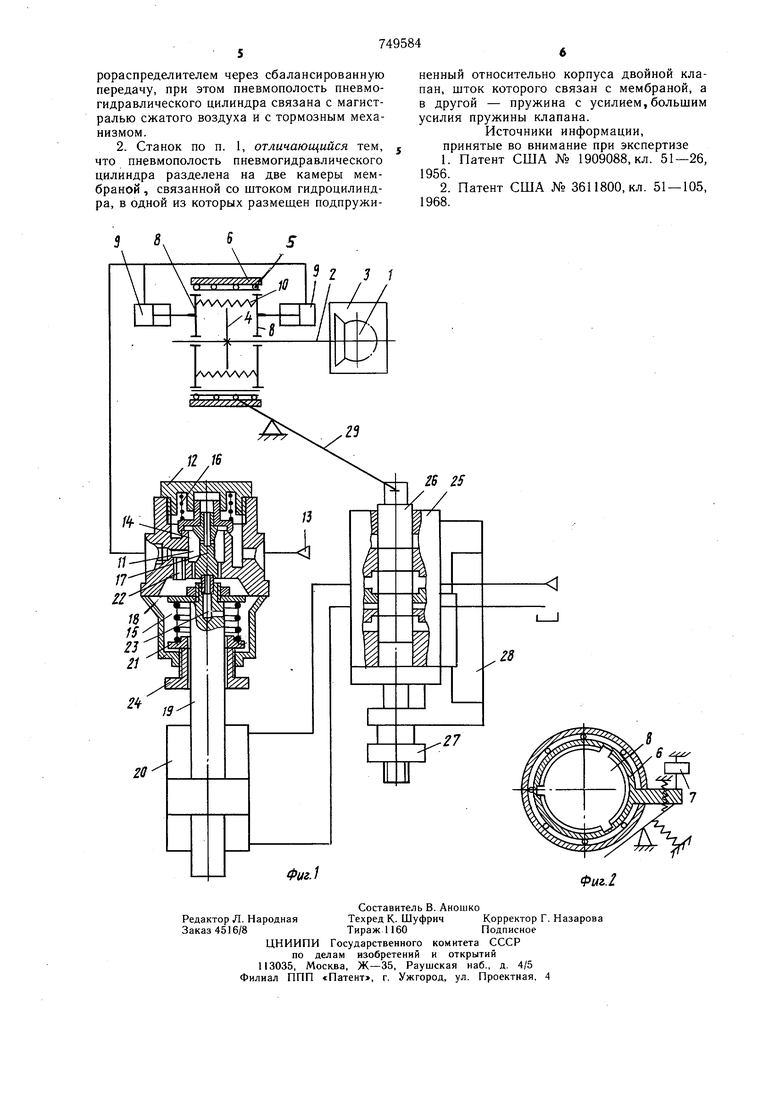
На фиг. 1 показано предлагаемое устройство; на фиг. 2 - то же, разрез тормозного механизма.
Станок имеет ведущий 1 и ведомый 2 шпиндели, смонтированные в бабках 3, размещенные на станине. На щпинделе 2 жестко установлен тормозной диск 4. В бабке с возможностью вращения в подшипниках 5 смонтирована гильза 6, подпружиненная упругим элементом тензорезисторного датчика 7 в среднем положении. В пазах гильзы размещены подвижные тормозные диски 8 и замыкающие пневмокамеры 9, между дисками - возвратные пружины 10.
Исполнительный механизм выполнен в виде гидропневматического. Его пневматическая часть представляет собой полость 11 в корпусе 12, сообщающуюся с источником
13сжатого воздуха и с пневмокамерами 9. Эта полость закрыта поджатым к седлам
14и 15 пружиной 16 двойным клапаном 17 и мембраной 18. Односторонне относительно мембраны расположен ее привод, которым является шток 19 гидроцилиндра 20 двойного действия и установленная в том же корпусе пружина 21, усилие этой пружины должно быть больше усилия пружины 16. Над мембраной 18 имеется полость, сообщающаяся с основной полостью 11 каналом 22 и с атмосферой - каналом 23. В корпусе установлена регулировочная гайка 24 для изменения усилия пружины 21.
Управляющий следящий механизм выполнен в виде золотникового гидрораспределителя, он имеет корпус 25, кольцевые полости которого соединены с полостями гидроцилиндра 20, с давлением питания и со сливом. В корпусе 25 размещается четырехкромочный следящий золотник 26. Положение корпуса относительно золотника регулируется установленной в бабке 3 гайкой 27 и шкалой 28.
Гильза 6 тормозного механизма взаимодействует со следящим золотником через сбалансированную передачу, которую выгодно исполнять в виде уравновешенного рычага 29, поджатого к выступу гильзы 6 и входящего в паз золотника 26. Ось качания этого рычага находится на бабке, балансирование возможно осуществить как статическими грузами, так и пружинами.
Станок работает следующим образом.
После установки изделий на шпинделе включается главный привод. При отсутствии давления питания на управляющем механизме и включенной подаче воздуха в полость 11 регулируют натяг пружины 21 гайкой 24, тем самым регулируется давление воздуха в пневмокамерах 9, а тормозные диски 8 прижимаются к диску 4, создавая на изделиях тормозной момент, пропорциональный давлению воздуха в пневмокамерах 9. Величина этого момента устанавливается по шкале измерительного прибора.
Падение давления в камерах в процессе работы вызывает поворот рычага 29 и смещение золотника 26. Золотниковый гидрораспределитель регулирует давление в камерах гидроцилиндра пропорционально сигналу рассогласования и тем самым шток 19 гидроцилиндра 20 совместно с пружиной 21 дает результирующее усилие, которое, воздействуя на мембрану 18, перемещает клапан 17 вверх. Через образованный проход между седлом 16 и клапаном 17 проходит воздух от источника 13 сжатого воздуха в пневмокамеры 9, тем самым повышая давление до первоначальной величины, соответствующей прежнему положению рычага 29. Повышение давления в пневмокамерах 9 ведет соответственно к отклонению рычага 29 в обратную сторону, которое приводит к смещению золотника 26 гидрораспределителя и, следовательно, к изменению усилия воздействия щтока 19 гидроцилиндра 20 на мембрану 18.
Результирующее усилие от штока и повышение давления приводят к отклонению мембраны 18 вниз, в образовавщийся проход между седлом 15 и клапаном 17 по каналу 23 воздух уходит в атмосферу. Давление в камерах 9 падает до первоначальной величины, соответствующей прежнему положению рычага 29.
При отсутствии сигнала рассогласования нагрузку поддержания тормозного момента воспринимает пружина 21. Совместная работа в поддержании тормозного момента пружины 21 и щтока 19 гидроцилиндра позволяет снизить инерционные массы и силы трения исполнительного и управляющего механизмов, следовательно, повысить точность 5 поддержания тормозного момента.
В результате использования предлагаемого изобретения создан станок, в котором колебания тормозного момента составляют ±3%, станок прост в эксплуатации, так как в нем отсутствуют элементы электроники, сокращены габариты исполнительного и управляющего следящего механизмов по сравнению с общепринятыми, а главное, снижены управляк)щие усилия, что повыщает точность измерения.
Формула изобретения
JJJ и оснащенный тормозным механизмом ведомый шпиндель, управляющий следящий механизм, воздействующий через исполнительный механизм на тормозной механизм, связанный с управляющим следящим механизмом, отличающийся тем, что, с целью упроя щения конструкции, управляющий следящий механизм выполнен в виде золотникового гидрораспределителя, исполнительный механизм - в виде пневмогидравлического цилиндра, а тормозной механизм связан гидрораспределителем через сбалансированную передачу, при этом пневмополость пневмогидравлического цилиндра связана с магистралью сжатого воздуха и с тормозным механизмом.
8
/
ненный относительно корпуса двойной клапан, шток которого связан с мембраной, а в другой - пружина с усилием,большим усилия пружины клапана.
Источники информации, принятые во внимание при экспертизе
