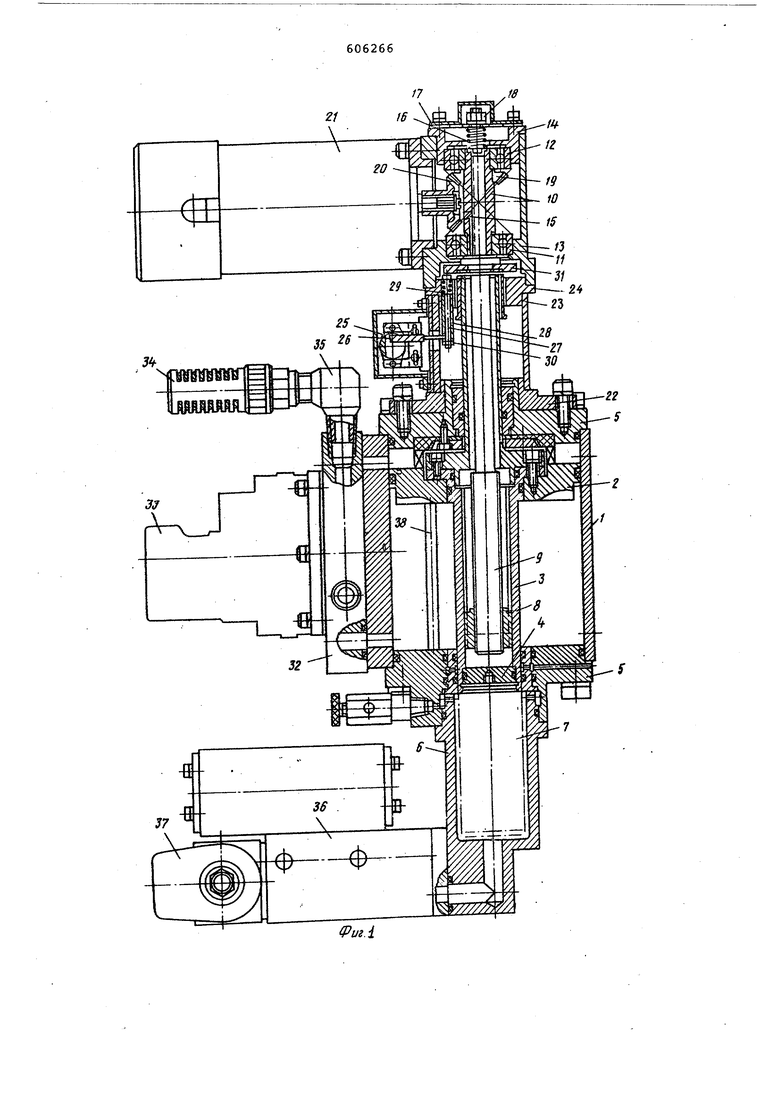
Изобретение относится к приводам технического оборудования и может быть использовано в гидрофицированных промышленных работах, металлорежущем оборудовании, где имеется множество исполнительных элементов, осу ществляющих манипуляции по определен ному закону. Известны конструкции дозаторов, обеспечивающих подачу определенной дозы рабочей жидкости в исполнительный гидравлический привод, что позво ляет получить шаговое перемещение последнего. При этом величину дозы, и следовательно, величину шага исполнительного механизма можно регулировать в процессе переналадки стан ка. Примером такой конструкции являет ся дозатор итальянской фирмы ФИАТ где регулировка величины дозы рабочей жидкости осуществляется за счет регулировки рабочего хода поршня дозатора путем перемещения упорной гайки по винтовой части штока, доза тора , выступающего с наружной стороны корпуса. Перемещение упора дол но сопровождаться перемещением конечного выключателя, фиксирующего крайнее рабочее положение штока дозатора tl. Недостатком указанной конструкции является невозможность регулировки хода дозатора, а значит и объема выдаваемой дозы в процессе рабочего цикла станка, что позволяет обеспечивать шаговое перемещение исполнительного механизма только с постоянным, неизменным в процессе цикла шагом. Данная конструкция не позволяет осуществлять переменное по шагу перемещение исполнительных механизмов в процессе цикла. , Целью изобретения является обеспечение возможности изменения подаваемой дозы рабочей жидкости в процессе цикла работы исполнительного механизма в соответствии с заранее составленной программой. Указанная цель достигается тем, что в известном пневмогидравлическом дозаторе устройство для регулирования хода дозатора выполнено в виде электродвигателя, вал которого кинематически связан с гайкой-упором посредством викта, размещенного внутри полого плунжера мультипликатора, при этом гайка-упор зафиксирована от проворота относительно плунжера.Винт выполнен подпружиненным/ носитель флажка выполнен в виде подпружиненн го пальца, при этом винт взаимодействует с пальцем через выполненную нажимную шайбу. На фиг.1 изображен пнёвмогидрав-л ческий дозатор, разрез; на фиг.2 гидросхема встройки дозатора. В цилиндрической расточке корпуса 1, являющейся пневмокамерой дозатора размещается поршень 2, смонтированны на полом плунжере 3, закрытом с торца крышкой 4. К передней крышке 5 крепится гильза 6, имеющая цилиндрическую расточку 7, являющуюся гидрав лической камерой дозатора. Внутри полого плунжера 3 в специальных шлицах размещается гайка-упор 8, в которую ввернут винт 9.Хвостовая часть последнего проходит через отверстие полой втулки 10, опирающейся на подшипники качения 11 и 12, которые смонтированы.соответственно в корпусе 13 и крышке 14. Винт 9 может пере мещаться вдоль оси втулки 10 на скользящей шпонке 15. При этом резьбовой конец хвостовика винта 9, на который надета пружина 16, проходит в отверстие крышки 17 и закрепляется гайкой 18. На наружной проточке втул ки 10 закреплена коническая шестерня 19,связанна с конической шестерней 20,установленной на выходном валу электродвигателя 21. Последний жестко закреплен на фланце корпуса 13. На крышке 5 смонтирован промежуто ный фланец 22, к которому приварена гильза 23 с фланцем 24. На верхнем фланце гильзы 23 смонтирован конечный выключатель 25, а в прорези гильзы 23 перемещается флажок 26, закрепленный-на пальце 27.Последний размещается во втулке 28,торец которой опирается на пружи ну 29. Флажок 26 прижимается к торцу втулки 28 гайкой 30, ввернутой на резьбовой хвостовик пальца 27. На винте 9 закреплена нажимная шайба 31, установленная с некоторым зазором относительно торца пальца 27.- . На верхнем фланце корпуса 1 через переходную плиту 32 закрепляется двухпозиционный четырехлинейный пневмораспределитель 33 стыкового испол нения с электрическим управлением. На переходной плите 32 выполнены резьбовые отверстия для присоединения глушителя 34 через угольник 35, а также для подвода сжатого воздуха от пневмосети. На верхнем фланце гильзы 6 смонти рован гидравлический блок 36, который включает в себя гидравлическую аппаратуру управления исполнительными гидроцилиндрами: обратные клапаны и управляемые обратные клапаны (гидрозамки). К гидравлическому блоку 36 крепитсялвухпозиционный че-тырехлинейный гидрораспределитель 37( с электрическим управлением. На крышка 5 установлен вентиль, необходимый для стравливания воздуха из гидравлической полости гильзы 6. Для предотвращения само{1роизвольного проворота поршня 2 и плунжера 3,. поршень 2 перемещается по неподвижно закрепленному в крышках 5 штырю 38. Таким образом, представленная на фиг.1 конструкция, реализует принципиальную пневмогидравлическую схему, представленную на фиг.2, на которой 39 - дозатор, 40 - электродвигатель, 41 и 42 - шестерни передачи, 43 винт, 44 - гайка-упор, 45 - пневмораспределитель управления лозаторами, 46 - гидравлический исполнительный цилиндр, 47 и 48 - гидрозамки, 49 - гидравлический распределитель управления исполнительным гидроцилиндром, 50-52 - обратные гидроклапаны, 53 - подпитывающий бачок, 54 глушитель. Дозатор работает следующим образом. В исходном положении поршень 2 находится в крайнем положении на упоре В. крышку 5. Сжатый воздух через пнев ЙЬраспределитель 33 поступает в левую пневмополость дозатора. В начале работы в соответствии с программой происходит установка гайки-упора 8 для обеспечения необходимой величины хода дозатора, а значит и величины вьщаваемой дозы. Установка гайки-упора 8 происходит за счет поворота вала электродвигателя 21 на определенный угол в соответствии с командой электросистемы управления, Вращение вала двигателя 21 через шестерни 20 и 19 передается на втулку 10 и далее через скользящую шпонку 15 на винт 9. Вращение винта 9 преобразуется в линейное перемещение гайки 8. Таким образом, поворот вала электродвигателя 21 на определенный угол соответствует определенному линейному перемещению гайки-упора 8. После установки гайки-упора 8 происходит переключение пн-евмораспределителя 33, в результате чего сжатый воздух постулает в правую пневмополость дозатора, а левая его пневмополость связывается с атмосферой через соответствующие кангшы пневмораспределителя 33 и глушитель 34. Поршень 2 с плунжером 3 начинает движение влево, при этом плунжеТр 3 вытесняет рабочую жидкость из гидрополости дозатора с давлением, во столько раз большим давления в пневмосети, во сколько активная площадь поршня больше активной площади плунжера. Рабочая жидкость из гидрополости дозатора через клапан 51 (см.рис.2), соответствующий канал гидрораспредеителя 49 и гидрозамок 47 или 48 поступает в исполнительный гидроцилинд 46, шток которого перемещается на ве личину, определяемую объемом дозы, выдаваемой дозатором. Четкость остановки штока исполнительного цилиндра 46 после окончания работы дозатора обеспечивается гидрозамками 47 и 4SJ Слив из нерабочей полости цилиндра 46 через гидрозамок 48 или 47, со{ответствующий канал гидрораспределителя 49 и обратный клапан 50 осущест вляется в подпитьшающий бачок 53. При подходе поршня 2 дозатора к гайке-упору 8 происходит следующее. Под воздействием усилия, развиваемого поршнем 2, винт 9 с гайкой-упо ром 8 перемещается на некоторую вели чину влево/ сжимая при этом пружину 16. В результате этого перемещения нажимная шайба 31 упиоается в торац пальца 27 и перемещает его влево, сжимая пружину 29. Связанный с пальцем 27 флажок 26 перемещается влево воздействуя на неподвижно установленный конечный выключатель 25, последний, срабатывая, выдает сигнал об окончании рабочего хода дозатора. Пневмораспределитель 33 переключается в исходное положение, обесггечивая реверс дозатора. Поршень 2 при этом перемещается в свое крайнее правое положение, становясь на упор в крышк 5 и воздействуя на конечный выключатель {не показан), фиксирующий при ход дозатора в исходное положение. Во время перемещения поршня 2 Дозатора в исходное положение в соответствии с командой системы управления происходит перемещение гайки-упора 8 в положение, необходимое для обеспечения следующего цикла работы дозатора. При реверсе поршня 2 дозатора пружины 16 и 29 обеспечивают установку винта 9 и 27 с флажком 26 в исходное положение. Заполнение гидравлической полости дозатора при его реверсе обеспечивается от подпитывающего бачка 53 через обратный клапан 52. Предлагаемая конструкция и схема подключения обеспечивают таким образом программируемое перемещение исполнительного гидроцилиндра в обоих направлениях. Формула изобретения 1.Пневмогидравлический дозатор для гидравлических исполнительных органов технологического оборудования, выполненный в виде пневмогидравлического мультипликатора, плунжер которого снабжен средством для регулирования хода дозатора, включающим гайку-упор, взаимодействующую носителем флажка с конечным выключателем, фиксирующим крайнее положение плунжера, отличающийс я тем, что, с целью обеспечения регулирования объема дозы в процессе рабочего цикла оборудования, устройство для регулирования хода дозатора выполнено в виде электродвигателя, вал КОТОРОГО кинематически связан с гайкой-упором посредством винта, размещенного внутри полого плунжера о мультипликатора, при этом гайка-упор зафиксирована от провората относительно плунжера. 2.Дозатор по П.1, о т л и ч а ю щ и и с я тем, что упрмянутый винт выполнен подпружиненным, носитель флажка выполнен в виде подпружиненного пальца, при этом винт взаимодействует с пальцем через выполненную нажимную шайбу. Источники информации, принятые во внимание при экспертизе 1. Дозатор фирмы Fiat, чер. № М.50.665.649, АвтоВАЗ, 1970.


| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Пневмогидравлический дозатор | 1978 |
|
SU764932A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1998 |
|
RU2133888C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1993 |
|
RU2086811C1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневмогидравлический привод с объемным регулированием координаты | 1980 |
|
SU921769A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмогидравлический позиционныйпРиВОд | 1979 |
|
SU795869A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1992 |
|
RU2067695C1 |
| Пневмогидравлический привод многоместных зажимных приспособлений технологического оборудования | 1977 |
|
SU1022801A2 |